文章目录
- 前言
- 实验步骤
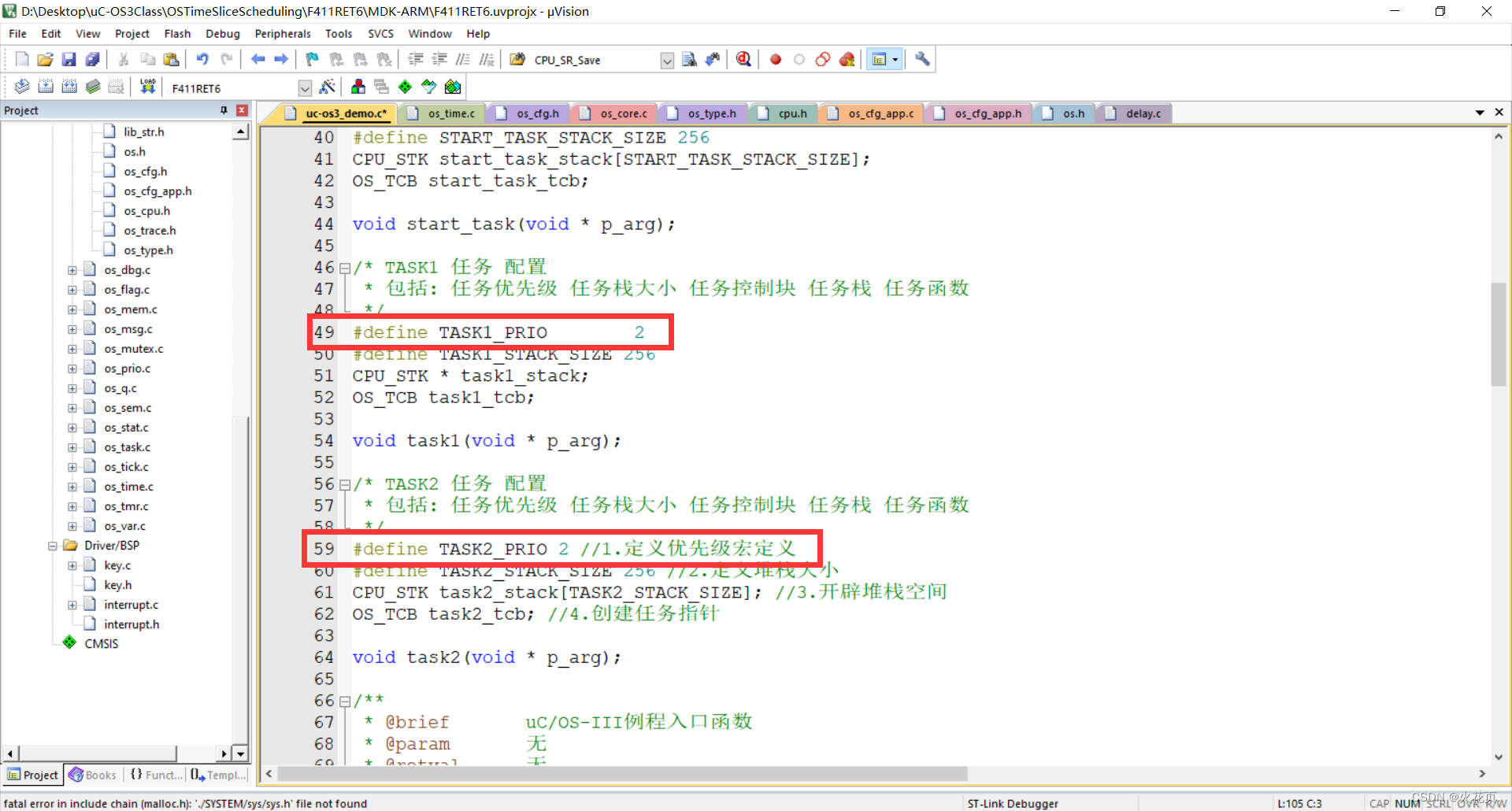
- 1.复制任务创建和删除工程文件并删除task3任务,修改任务1和任务2的优先级为2
- 2.修改任务1和任务2的内容
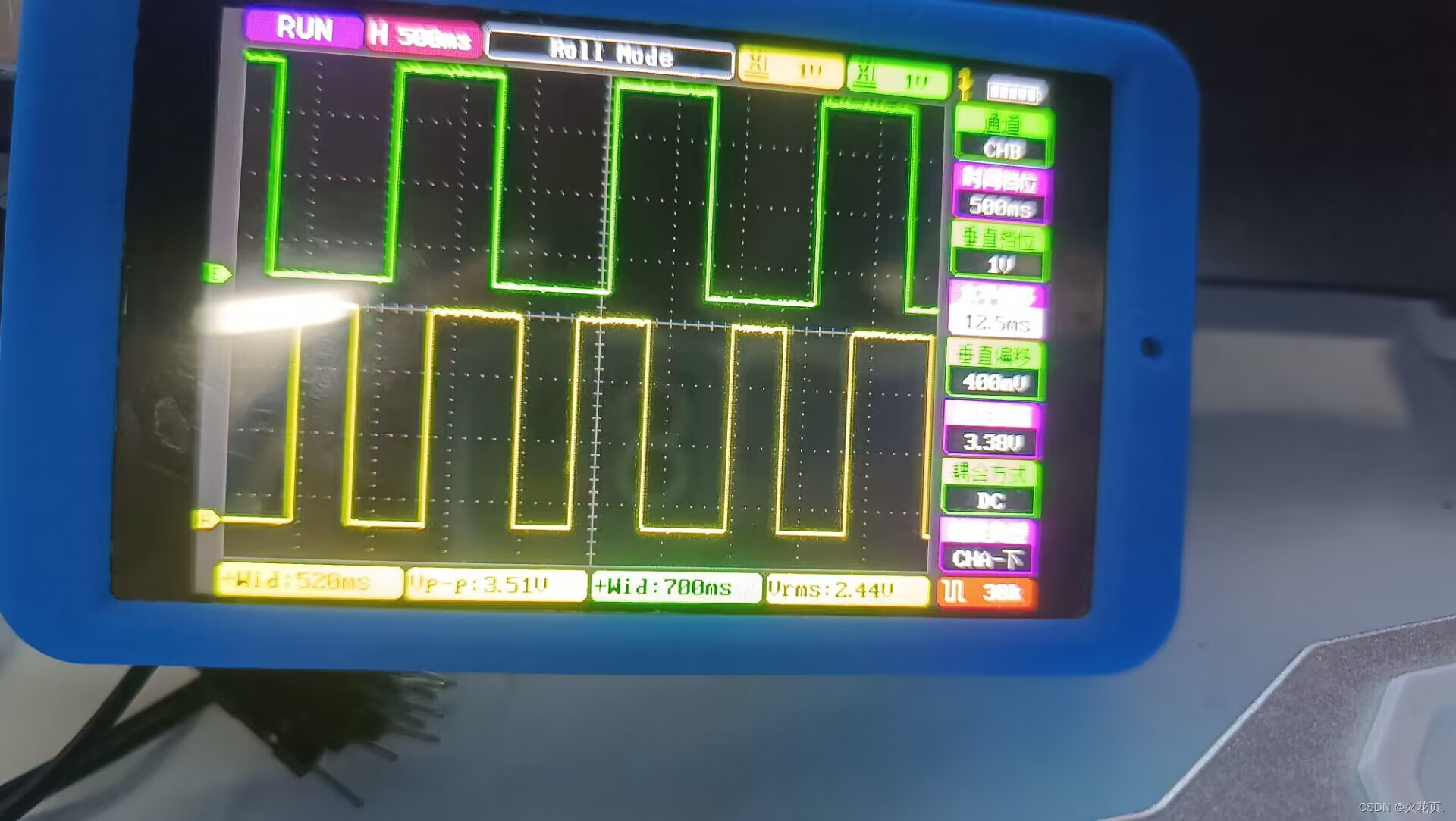
- 3.查看示波器现象
- 测试代码
- 工程文件
- 总结
前言
无,仅作记录,不具有参考价值,所用开发板为STM32F411RET6nucleo开发板。
实验步骤
1.复制任务创建和删除工程文件并删除task3任务,修改任务1和任务2的优先级为2
2.修改任务1和任务2的内容
3.查看示波器现象
测试代码
us-os3_demo.c:
/**
****************************************************************************************************
* @file uc-os3_demo.c
* @author ÕýµãÔ×ÓÍŶÓ(ALIENTEK)
* @version V1.0
* @date 2022-04-13
* @brief uC/OS-III ÒÆֲʵÑé
* @license Copyright (c) 2020-2032, ¹ãÖÝÊÐÐÇÒíµç×ӿƼ¼ÓÐÏÞ¹«Ë¾
****************************************************************************************************
* @attention
*
* ʵÑéƽ̨:ÕýµãÔ×Ó Ì½Ë÷Õß F407¿ª·¢°å
* ÔÚÏßÊÓƵ:www.yuanzige.com
* ¼¼ÊõÂÛ̳:www.openedv.com
* ¹«Ë¾ÍøÖ·:www.alientek.com
* ¹ºÂòµØÖ·:openedv.taobao.com
*
****************************************************************************************************
*/
#include "uc-os3_demo.h"
#include "./MALLOC/malloc.h"
#include "./SYSTEM/delay/delay.h"
/*uC/OS-III*********************************************************************************************/
#include "os.h"
#include "cpu.h"
#include "main.h"
#include "key.h"
#include "stdio.h"
#include "interrupt.h"
extern struct keys key[4];
/******************************************************************************************************/
/*uC/OS-IIIÅäÖÃ*/
/* START_TASK ÈÎÎñ ÅäÖÃ
* °üÀ¨: ÈÎÎñÓÅÏȼ¶ ÈÎÎñÕ»´óС ÈÎÎñ¿ØÖÆ¿é ÈÎÎñÕ» ÈÎÎñº¯Êý
*/
#define START_TASK_PRIO 5
#define START_TASK_STACK_SIZE 256
CPU_STK start_task_stack[START_TASK_STACK_SIZE];
OS_TCB start_task_tcb;
void start_task(void * p_arg);
/* TASK1 ÈÎÎñ ÅäÖÃ
* °üÀ¨: ÈÎÎñÓÅÏȼ¶ ÈÎÎñÕ»´óС ÈÎÎñ¿ØÖÆ¿é ÈÎÎñÕ» ÈÎÎñº¯Êý
*/
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 256
CPU_STK * task1_stack;
OS_TCB task1_tcb;
void task1(void * p_arg);
/* TASK2 ÈÎÎñ ÅäÖÃ
* °üÀ¨: ÈÎÎñÓÅÏȼ¶ ÈÎÎñÕ»´óС ÈÎÎñ¿ØÖÆ¿é ÈÎÎñÕ» ÈÎÎñº¯Êý
*/
#define TASK2_PRIO 2 //1.¶¨ÒåÓÅÏȼ¶ºê¶¨Òå
#define TASK2_STACK_SIZE 256 //2.¶¨Òå¶ÑÕ»´óС
CPU_STK task2_stack[TASK2_STACK_SIZE]; //3.¿ª±Ù¶ÑÕ»¿Õ¼ä
OS_TCB task2_tcb; //4.´´½¨ÈÎÎñÖ¸Õë
void task2(void * p_arg);
/**
* @brief uC/OS-IIIÀý³ÌÈë¿Úº¯Êý
* @param ÎÞ
* @retval ÎÞ
*/
void uc_os3_demo(void)
{
OS_ERR err;
/* ³õʼ»¯uC/OS-III */
OSInit(&err);
OSTaskCreate ( (OS_TCB *) &start_task_tcb,
(CPU_CHAR *) "start_task",
(OS_TASK_PTR ) start_task,
(void *) 0,
(OS_PRIO ) START_TASK_PRIO,
(CPU_STK *) start_task_stack,
(CPU_STK_SIZE ) START_TASK_STACK_SIZE / 10,
(CPU_STK_SIZE ) START_TASK_STACK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0,
(void *) 0,
(OS_OPT ) (OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *) &err);
/* ¿ªÊ¼ÈÎÎñµ÷¶È */
OSStart(&err);
}
void start_task(void * p_arg)
{
OS_ERR err;
CPU_INT32U cnts = 0;
CPU_Init();
CPU_SR_ALLOC();
cnts = HAL_RCC_GetSysClockFreq() / OS_CFG_TICK_RATE_HZ;
OS_CPU_SysTickInit(cnts);
OSSchedRoundRobinCfg (OS_TRUE, 10, &err);/* ʹÄÜʱ¼äƬµ÷¶È£¬²¢ÉèÖÃʱ¼äƬĬÈϳ¤¶ÈΪ10¸öʱ¼äƬ */
CPU_CRITICAL_ENTER(); /* ½øÈëÁÙ½çÇø */
task1_stack = mymalloc(SRAMIN, TASK1_STACK_SIZE * sizeof(CPU_STK));
/* ´´½¨task1 */
OSTaskCreate ((OS_TCB *) &task1_tcb,
(CPU_CHAR *) "task1",
(OS_TASK_PTR ) task1,
(void *) 0,
(OS_PRIO ) TASK1_PRIO,
(CPU_STK *) task1_stack,
(CPU_STK_SIZE ) TASK1_STACK_SIZE / 10,
(CPU_STK_SIZE ) TASK1_STACK_SIZE,
(OS_MSG_QTY ) 0,
(OS_TICK ) 0, /* ĬÈÏʱ¼äƬ³¤¶ÈΪ10 */
(void *) 0,
(OS_OPT ) (OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR),
(OS_ERR *) &err);
OSTaskCreate ((OS_TCB *)&task2_tcb,
(CPU_CHAR *)"task2",
(OS_TASK_PTR )task2,
(void *)0,
(OS_PRIO )TASK2_PRIO,
(CPU_STK *)task2_stack,
(CPU_STK_SIZE )TASK2_STACK_SIZE / 10,
(CPU_STK_SIZE )TASK2_STACK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )5,
(void *)0,
(OS_OPT )OS_OPT_TASK_STK_CHK | OS_OPT_TASK_STK_CLR,
(OS_ERR *)err);
CPU_CRITICAL_EXIT(); /* Í˳öÁÙ½çÇø */
printf("ÕýÔÚ´´½¨ÖÐ\r\n");
OSTaskDel((OS_TCB*)0, &err); //±ðÍüÁËɾ³ýÈÎÎñStart
}
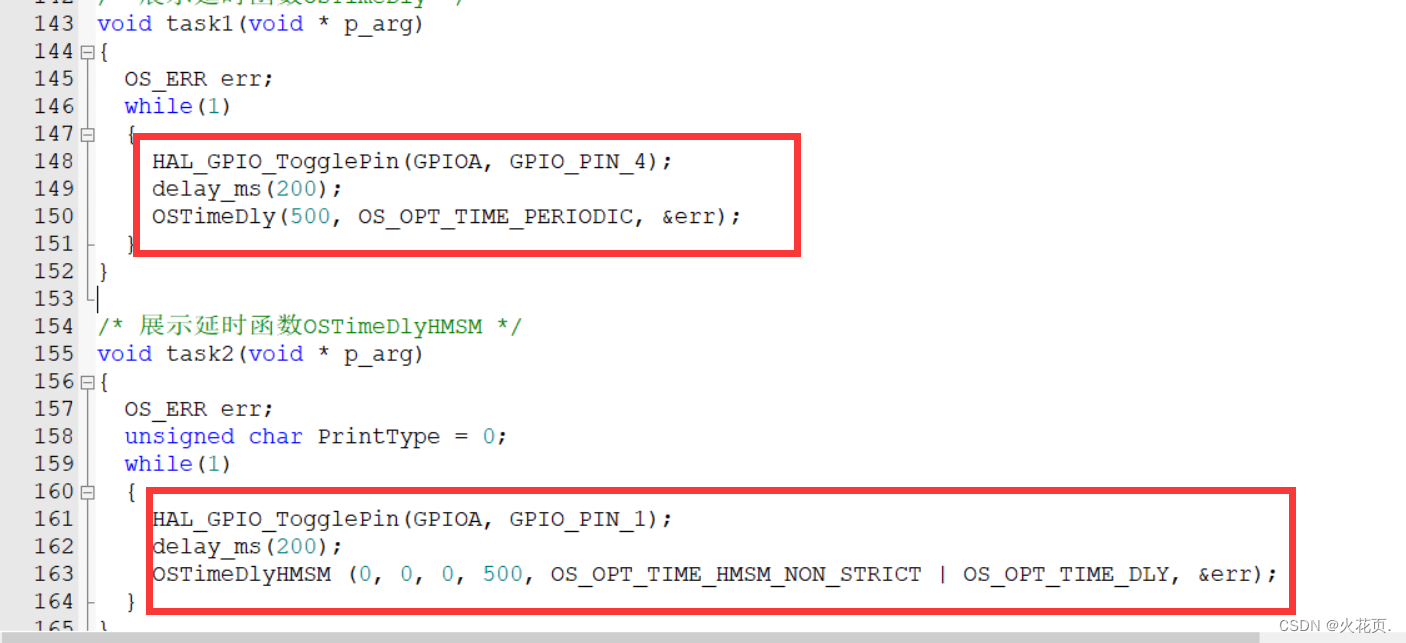
/* չʾÑÓʱº¯ÊýOSTimeDly */
void task1(void * p_arg)
{
OS_ERR err;
while(1)
{
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_4);
delay_ms(200);
OSTimeDly(500, OS_OPT_TIME_PERIODIC, &err);
}
}
/* չʾÑÓʱº¯ÊýOSTimeDlyHMSM */
void task2(void * p_arg)
{
OS_ERR err;
unsigned char PrintType = 0;
while(1)
{
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_1);
delay_ms(200);
OSTimeDlyHMSM (0, 0, 0, 500, OS_OPT_TIME_HMSM_NON_STRICT | OS_OPT_TIME_DLY, &err);
}
}
工程文件
时间管理实验
总结
学习视频:【正点原子】手把手教你学UCOS-III实时操作系统第20讲时间管理