ROS1云课→20迷宫不惑之A*大法(一种虽古老但实用全局路径规划算法)
将CoCube分别放入如下地图中的左侧,如何从右侧逃离:
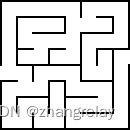
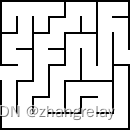
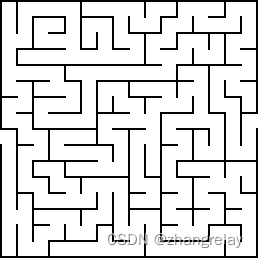
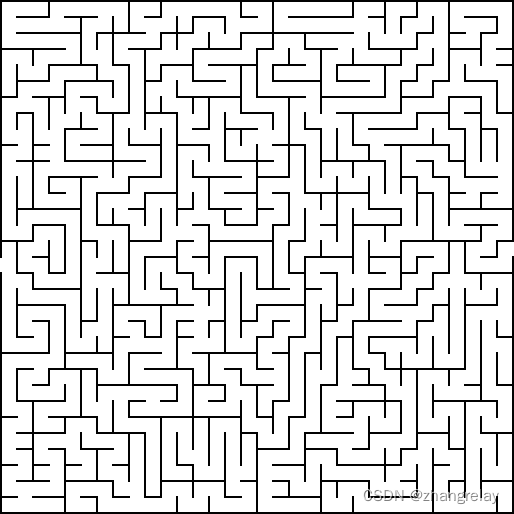
需要算法:求解起点到终点的路径。
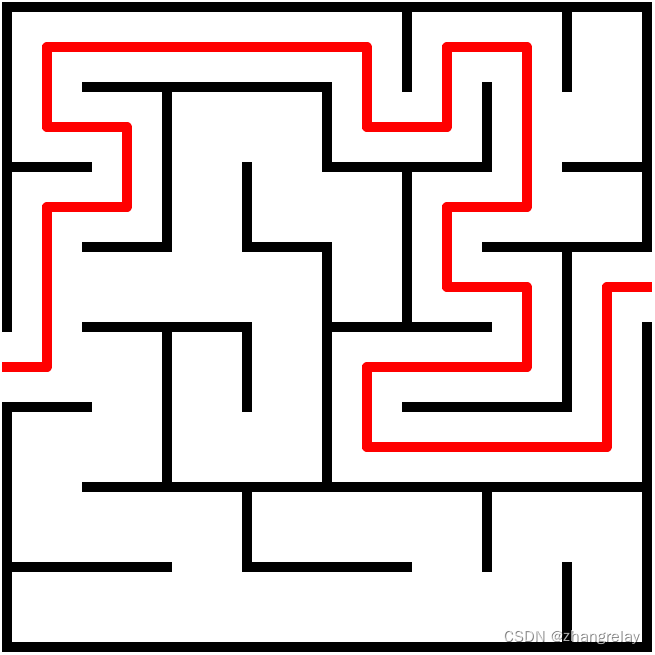
还需要什么?
参考:
(eng.libretexts.org/Bookshelves/Mechanical_Engineering/Introduction_to_Autonomous_Robots_(Correll))
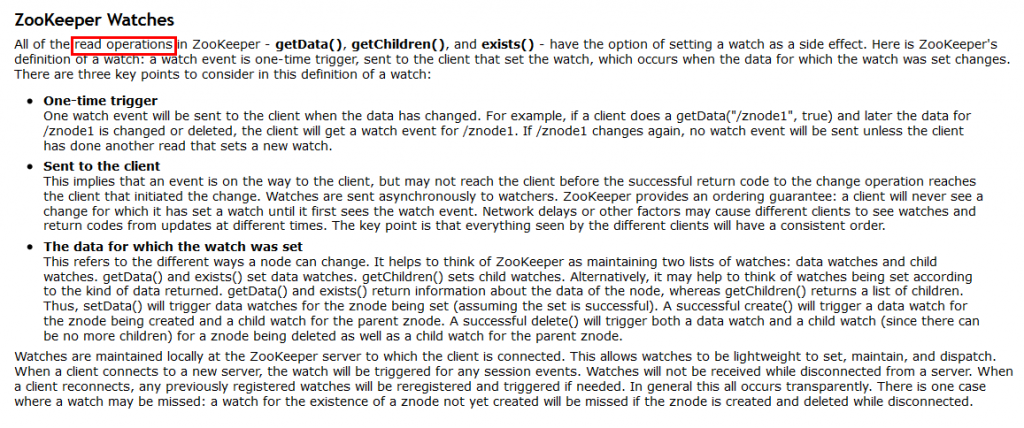
Ratslife是由Cyberbotics美国的Olivier Michel开发的微型机器人迷宫比赛。RatslifeEnvironment可以用乐高积木、纸板或木头轻松创建,游戏可以使用任意两个移动机器人进行,最好是能够识别环境中标记的机器人。其中包括带有车载摄像头的简单差速车轮教育平台,甚至是智能手机驱动的机器人。
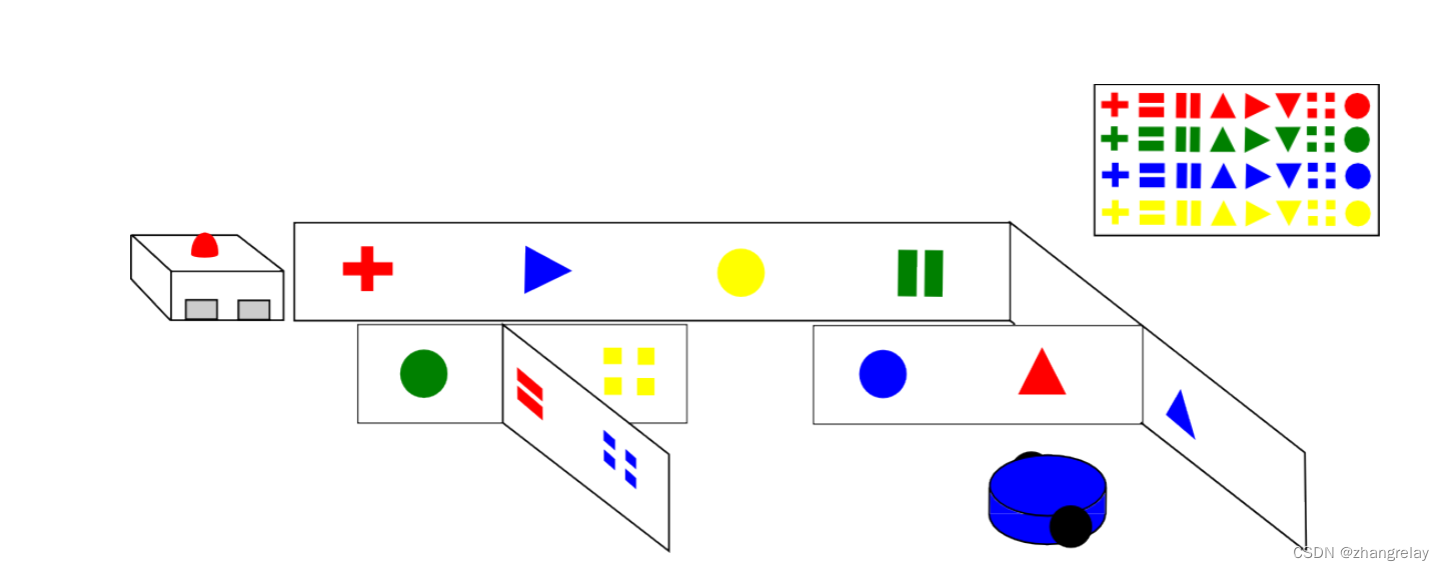
图:一个由纸板、木头或乐高积木制成的简单迷宫,带有一个或多个充电站。迷宫中的位置用简单的机器人可以识别的独特标记标记。
图显示了一个简单的示例环境,该环境可由工艺材料构建,并可用于教授比赛中移动机器人的实用方面。在RatsLife中,两个微型机器人在寻找隐藏在迷宫中的四个“喂食器”。一旦机器人到达喂食器,它就会获得“能量”,再持续60秒,喂食器就会暂时无法使用。过了一会儿,进料器再次可用。馈线可以由同时负责计时的裁判控制,也可以作为电子或机电一体化简单课程的一部分。
现在应该已经很清楚了,你将如何利用你的能力解决这些任务,你还应该考虑在某些传感器不可用的情况下的回退策略。以下是机器人的一些可能算法,按照其提供的功能排序:
假设你有一个机器人,它只能驱动(驱动)并从墙上反弹。由此产生的随机行走最终会让机器人到达喂食器。由于允许的时间有限,机器人的能量很可能很快就会耗尽。
现在想象一个机器人,它有一个传感器,能够估计它与墙壁的距离。这可能是胡须、红外距离传感器、超声波距离传感器或激光测距仪。机器人现在可以使用这个传感器继续跟踪右侧的墙壁。使用这种解决迷宫的策略,它将最终探索整个迷宫,除了其中的岛屿。
最后,想想一个机器人,它可以用视觉识别简单的模式,有距离传感器来避开墙壁,还有一个“里程表”来跟踪车轮的转动。利用这些能力,一个潜在的获胜策略将是探索环境,使用视觉识别环境中的标记,并使用它们创建所有馈线位置的地图,计算从馈线到馈线的最短路径,并在它们之间来回移动。从策略上讲,在喂食器前面等待,并在机器人没电之前接近喂食器可能是有意义的。
Ratslife的页面是在CC BY-NC 4.0许可证下共享的,由Nikolaus Correll通过根据LibreTexts平台的风格和标准编辑的源内容创作、重新混合和/或策划;可应要求提供详细的编辑历史记录。




![[附源码]Python计算机毕业设计Django疫情防控平台](https://img-blog.csdnimg.cn/dba163a7496d4d85960b1a0a40f8f5b5.png)