1、开局一张图
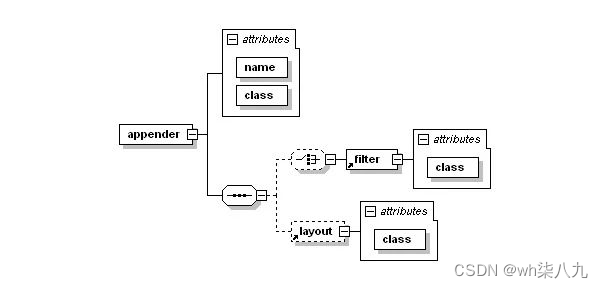
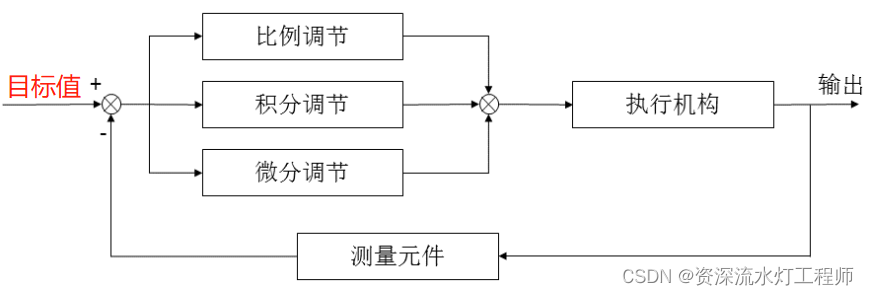
很多地方都觉得PID的控制结构示意图是这样的:
2、目标值(Setpoint)、输入值(Input)、误差(Error)
其实把上图那个输入改为目标值(Setpoint)更合适,因为不管是什么控制系统,都应该有个目标值,比如水位控制系统,水位的高度就是目标值;温度控制系统,想要的温度就是目标值;速度控制系统,想要的速度就是目标值。目标值是所有控制系统的前提,所以PID控制结构示意图应该改 为这样:
要想知道你的控制系统是否达到你的目标值,你需要干什么?当然是不断地看结果,比如温度控制系统,你通过加热的方式把一个铁块的温度控制在60℃,要想知道有没有达到这个目标温度,就需要搞一个温度传感器来测量铁块的温度,这个温度传感器就是测量元件。
温度传感器测量铁块温度的目的是什么?就是看铁块的温度是否到60℃了。怎么看,就是把这个测量值与目标值作比较,比大小,比出来的结果就叫误差。温度传感器测出来的温度就是反馈值,因为反馈值是不断地送到控制系统的,所以这个反馈值叫做输入更合适。
误差值 = 目标值 - 输入值
也可以写成这样 :
一般把写成
,也就是
某个时刻的误差值可以写成, 也就是
控制系统的计算核心就是根据这个误差来展开的,这个后面来展开。
比如温度传感器检测出来的温度是50摄氏度,误差Error = 60 - 50 = 10℃,这就表示温度还不够,还得继续加热,这个加热机构就是执行机构,这个执行机构可以是烧柴火,也可以是烧煤气,也可以是电加热条、电加热块......
不管是火、还是煤气、还是电,都只是个媒介,我们要的是控制思想。如果温度传感器测出来的温度是10度,远低于60℃,该怎么办,当然是把火烧旺点,电流加大点;如果温度传感器测出来的温度超过60℃,超过目标值了该怎么办,当然是把火或者电给关了。
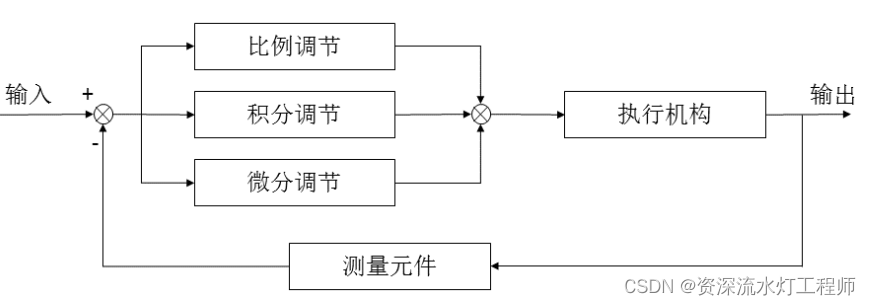
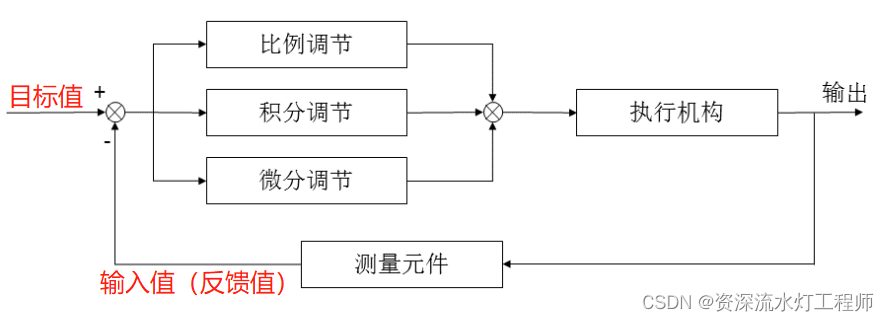
执行机构执行之后,也就是烧火,或者烧电之后,应该有个结果,这个结果就是铁块的温度,我们通过温度传感器来采集这个结果,并作为反馈值(输入值)送给控制机构,所以那个控制结构示意图还是有些欠妥,应该改为:

3、控制核心
前面说的温度比目标值小就加火加电,温度比目标值大就停火停电,这个加和停就是控制,要烧多大的火或者要放多大的电,这个量就是输出,PID控制就是控制这个火的大小,电的大小,从而达到控制温度的目的,所以,那个控制结构示意图应该这样标注:

PID的控制核心就是算一下该输出多大的火力或者电力,或者其他什么,反正都叫做输出(Output)。
现在大家应该都理解目标值、输入值(反馈值)、结果、输出、误差这些概念了,那个经典的公式应该可以出来了:
这个就是经过计算之后,应该输出的火力大小;
这个就是前面所说的误差:
比例、积分、微分
上面的经典公式又引入了3个新东西
这个就是比例系数(它是什么,要它干啥)
这个就是积分系数(它是什么,要它干啥)
这个就是微分系数(它是什么,要它干啥)
PID相关参数讲解:1、比例系数Kp与静态误差_资深流水灯工程师的博客-CSDN博客
PID代码实现
把这位外国网友的代码拿来分析一下,Arduino的某个PID库就是这哥们写的,原文链接如下
PID « Project Blog (brettbeauregard.com)
PID的开局都是这个公式:
上面的公式是理想的情况,在代码实现的时候,需要将其离散化。
PID算法调用时间的分析
积分与微分与时间是直接相关的,咱也不提什么采样周期的事了,就是随机的调用PID算法,记录每次调用PID算法的时间间隔(timeChange)。
这个时间间隔(timeChange)就等于当前的时间减去上一次调用PID算法的时间:
所以累计
误差errSum
用C语言表示累计误差可以是这样:
errSum += (error * timeChange);误差的微分dErr,等于本次的误差减去上次一PID计算时的误差,除以时间间隔:
综上,公式用C语言表示出来可以是这样的:
Output = kp * error + ki * errSum + kd * dErr;因为是随机的调用PID算法,所以需要记录每次PID计算时的时间点和误差
lastErr = error;
lastTime = now;比例系数、积分系数、微分系数的设置函数实现
void SetTunings(double Kp, double Ki, double Kd)
{
kp = Kp;
ki = Ki;
kd = Kd;
}完整的PID实现代码如下所示
/*working variables*/
unsigned long lastTime;
double Input, Output, Setpoint;
double errSum, lastErr;
double kp, ki, kd;
void Compute()
{
/*How long since we last calculated*/
unsigned long now = millis();
double timeChange = (double)(now - lastTime);
/*Compute all the working error variables*/
double error = Setpoint - Input;
errSum += (error * timeChange);
double dErr = (error - lastErr) / timeChange;
/*Compute PID Output*/
Output = kp * error + ki * errSum + kd * dErr;
/*Remember some variables for next time*/
lastErr = error;
lastTime = now;
}
void SetTunings(double Kp, double Ki, double Kd)
{
kp = Kp;
ki = Ki;
kd = Kd;
}这个Compute()函数是被不定期的调用,一般情况下效果也可以,能正常的工作起来,但距离工业应用还差的很远,还需要解决下面一系列的问题:
- 采样时间 :如果定期对PID算法进行评估,则其效果最佳。如果算法知道此间隔,我们还可以简化一些内部数学运算。
- 微分冲击 :这不是最大的问题,但是很容易解决,因此我们将这样做。
- 动态调整参数 : 一种好的PID算法可以在不影响内部工作的情况下更改调整参数。
- 缓解积分饱和 : 我们将介绍什么是缓解积分饱和,并实施具有附带好处的解决方案。
- 开/关(自动/手动):在大多数应用中,有时需要关闭PID控制器并手动调节输出,而不会干扰控制器。
- 初始化 : 控制器首次开启时,我们希望进行”无扰动的传输“,也就是说,我们不希望输出突然变为某个新值。
- 控制方向 : 最后一个不是鲁棒性本身名称的更改,它旨在确保用户输入具有正确符号的调优参数。
- 新增 测量比例(Proportional on Measurement) :添加这个特性使得它更加容易控制特定类型的过程。
本系列后面的文章就是围绕着8个问题展开,这8个问题全部解决之后,就是一个比较完善的PID控制算法了。