大家好,我是微学AI,今天给大家介绍一下人工智能(pytorch)搭建模型13-pytorch搭建RBM(受限玻尔兹曼机)模型,调通模型的训练与测试。RBM(受限玻尔兹曼机)可以在没有人工标注的情况下对数据进行学习。其原理类似于我们人类学习的过程,即通过观察、感知和记忆不同事物的特点,从而形成对这些事物的认知模型。本文将介绍RBM(受限玻尔兹曼机)模型的原理,并使用PyTorch框架实现一个简单的RBM模型。我们将介绍如何构建模型,加载样例数据进行训练,以及在训练完成后进行测试。
文章目录结构:
- RBM模型简介
- RBM模型原理
- 使用PyTorch搭建RBM模型
- 数据样例及加载
- 模型训练
- 模型测试
- 总结
1. RBM模型简介
受限玻尔兹曼机(RBM)是一种生成式随机神经网络,广泛应用于图像识别、语音识别、推荐系统等领域。RBM能够学习到数据的潜在表示,是深度学习的重要组成部分。
RBM 由一些可见变量和一些隐藏变量组成。它的基本思想是用一个二分图表示这些变量之间的关系。可见变量与隐藏变量之间没有边相连,而可见变量与其他可见变量、隐藏变量与其他隐藏变量之间都存在边相连。这种二分图结构使得 RBM 可以很好地对输入数据进行建模。
在训练阶段,RBM 的目标是学习一个能量模型,使得训练数据的概率最大化。为了实现这个目标,通常使用下降梯度的方法来最小化负对数似然函数(Negative Log-Likelihood,NLL),从而得到隐含层向量和可见层向量之间的权重和偏置值。当模型参数学习完成后,我们可以使用 RMB 对新的数据进行生成、降噪等处理。
RBM 能够有效地应用于很多领域,例如语音识别、图像处理、自然语言处理等。同时,它还是其他深度学习模型的基础,例如深度信念网络(Deep Belief Network,DBN)和深度玻尔兹曼机(Deep Boltzmann Machine,DBM)等。
2. RBM模型原理
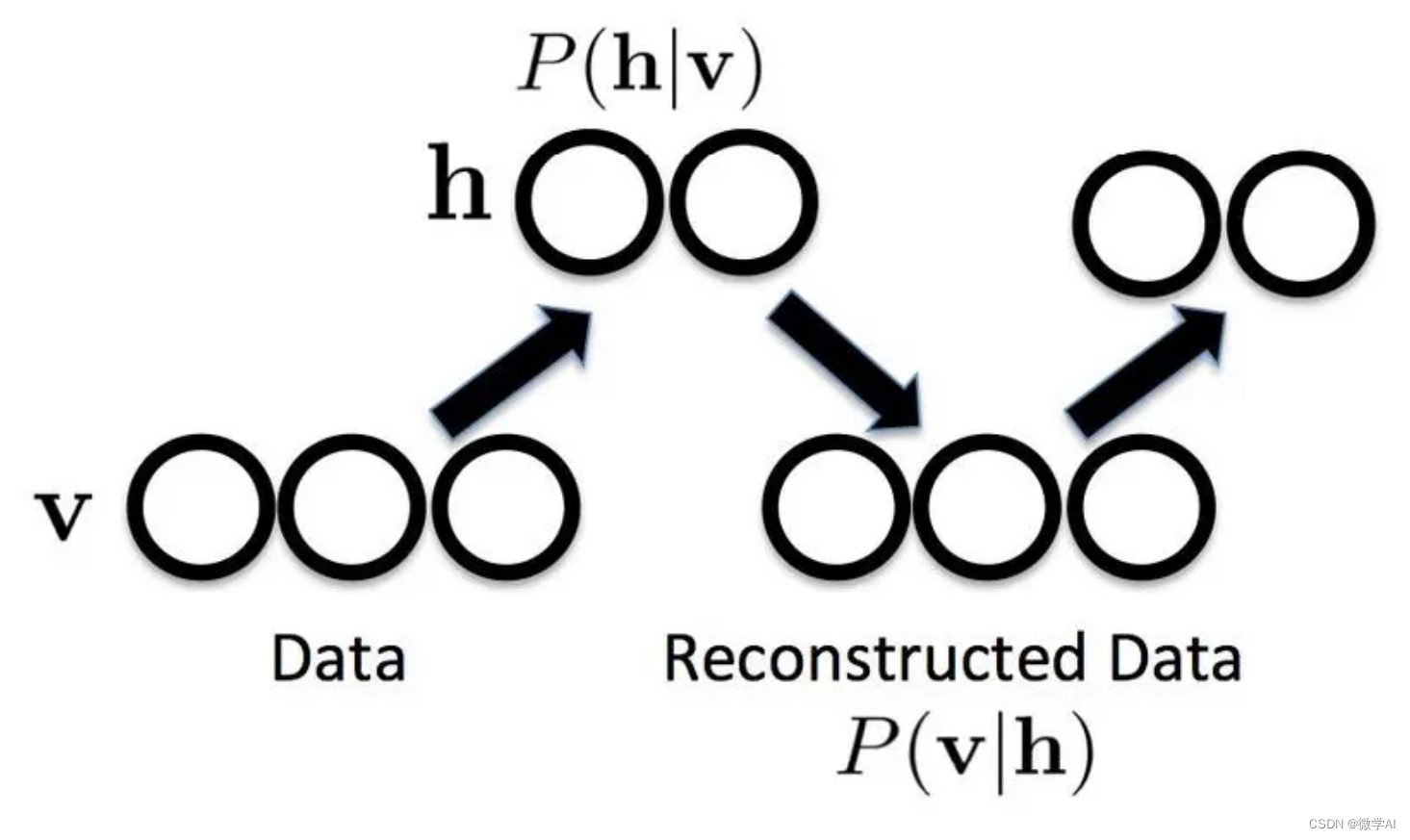
RBM是一个二部图模型,包括可见层(visible layer)和隐藏层(hidden layer),两层之间存在连接权重。可见层负责接收原始数据,隐藏层负责提取特征。与其他神经网络不同,RBM没有输出层,其学习过程是无监督的。
RBM的训练过程包括正向传播(从可见层到隐藏层)和反向传播(从隐藏层到可见层)。训练目标是最大化数据的对数似然,通过对比散度(Contrastive Divergence,简称CD)算法进行权重更新。
受限玻尔兹曼机(RBM)是一种用于无监督学习的概率生成模型。它由可见层和隐藏层组成,通过学习数据的分布来捕捉数据中的特征。
RBM的数学原理可以通过以下公式表示:
可见层的状态:
P
(
v
)
=
1
Z
∑
h
e
−
E
(
v
,
h
)
P(v) = \frac{1}{Z} \sum_h e^{-E(v,h)}
P(v)=Z1h∑e−E(v,h)
隐藏层的状态:
P
(
h
)
=
1
Z
∑
v
e
−
E
(
v
,
h
)
P(h) = \frac{1}{Z} \sum_v e^{-E(v,h)}
P(h)=Z1v∑e−E(v,h)
其中,$ E(v,h) $ 是能量函数,$ Z $是归一化常数。
RBM的学习过程主要包括两个步骤:正向传播和反向传播。
正向传播(Positive Phase):
在正向传播中,给定一个可见层的输入样本,通过计算隐藏层的激活概率来更新隐藏层的状态。
P ( h j = 1 ∣ v ) = σ ( ∑ i = 1 n v w i j v i + c j ) P(h_j=1|v) = \sigma\left(\sum_{i=1}^{n_v} w_{ij} v_i + c_j\right) P(hj=1∣v)=σ(i=1∑nvwijvi+cj)
其中,$ \sigma(x) $是sigmoid函数。
反向传播(Negative Phase):
在反向传播中,通过计算可见层的激活概率来更新可见层和隐藏层的状态。
P ( v i = 1 ∣ h ) = σ ( ∑ j = 1 n h w i j h j + b i ) P(v_i=1|h) = \sigma\left(\sum_{j=1}^{n_h} w_{ij} h_j + b_i\right) P(vi=1∣h)=σ(j=1∑nhwijhj+bi)
通过交替进行正向传播和反向传播,RBM可以学习到数据的分布,并用于生成新的样本。
3. 使用PyTorch搭建RBM模型
首先导入需要的库:
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
接下来定义RBM模型:
class RBM(nn.Module):
def __init__(self, visible_dim, hidden_dim, k=1):
super(RBM, self).__init__()
self.visible_dim = visible_dim
self.hidden_dim = hidden_dim
self.k = k
self.W = nn.Parameter(torch.randn(visible_dim, hidden_dim) * 0.01)
self.visible_bias = nn.Parameter(torch.zeros(visible_dim))
self.hidden_bias = nn.Parameter(torch.zeros(hidden_dim))
def sample_hidden(self, visible_probs):
hidden_probs = torch.sigmoid(torch.matmul(visible_probs, self.W) + self.hidden_bias)
return torch.bernoulli(hidden_probs)
def sample_visible(self, hidden_probs):
visible_probs = torch.sigmoid(torch.matmul(hidden_probs, self.W.t()) + self.visible_bias)
return torch.bernoulli(visible_probs)
def contrastive_divergence(self, visible):
v0 = visible
h0 = self.sample_hidden(v0)
v_k = v0.clone()
for _ in range(self.k):
h_k = self.sample_hidden(v_k)
v_k = self.sample_visible(h_k)
return v0, h0, v_k
def forward(self, visible):
v0, h0, v_k = self.contrastive_divergence(visible)
positive_association = torch.matmul(v0.t(), h0)
negative_association = torch.matmul(v_k.t(), self.sample_hidden(v_k))
return positive_association - negative_association
4. 数据样例及加载
为了简化问题,我们使用二值化的MNIST数据集作为示例。数据集包含手写数字0-9的灰度图像,每个图像的大小为28x28。我们需要将数据转换为可见层的形式。
from torchvision import datasets, transforms
def bernoulli(x):
return torch.bernoulli(x)
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Lambda(bernoulli)
])
mnist_train = datasets.MNIST(root='./data', train=True, download=True, transform=transform)
mnist_test = datasets.MNIST(root='./data', train=False, download=True, transform=transform)
train_loader = torch.utils.data.DataLoader(mnist_train, batch_size=5, shuffle=True, num_workers=2)
test_loader = torch.utils.data.DataLoader(mnist_test, batch_size=5, shuffle=False, num_workers=2)
5. 模型训练
接下来,我们将训练RBM模型。设置超参数,实例化RBM模型,然后使用随机梯度下降(SGD)优化器进行训练。SGD 是一种常用的优化算法,其基本思想是在每个迭代步骤中,通过计算当前样本的梯度来更新模型参数,以逐步寻找最小化损失函数的全局最优解。
visible_dim = 28 * 28
hidden_dim = 128
k = 1
learning_rate = 0.01
epochs = 10
rbm = RBM(visible_dim, hidden_dim, k)
optimizer = optim.SGD(rbm.parameters(), lr=learning_rate)
for epoch in range(epochs):
train_loss = 0
for i, (data, _) in enumerate(train_loader):
data = data.view(-1, visible_dim)
optimizer.zero_grad()
delta_W = rbm(data)
loss = -torch.mean(delta_W)
loss.backward()
optimizer.step()
train_loss += loss.item()
print(f"Epoch {epoch + 1}/{epochs}, Loss: {train_loss / (i + 1)}")
6. 模型测试
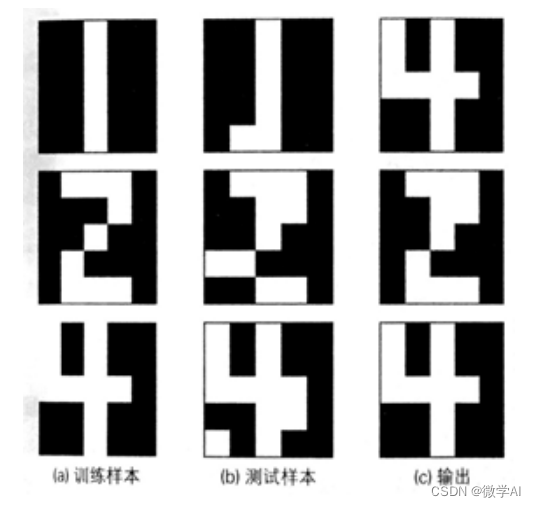
在模型训练完成后,我们可以将其应用于实际任务,如特征提取、分类等。这里我们简单地展示如何使用训练好的RBM模型重构测试数据。
import matplotlib.pyplot as plt
def display_reconstruction(rbm, test_loader, num_images=5):
_, (test_data, _) = next(enumerate(test_loader))
test_data = test_data[:num_images].view(-1, visible_dim)
v0, _, v_k = rbm.contrastive_divergence(test_data)
fig, axes = plt.subplots(nrows=2, ncols=num_images, figsize=(10, 4))
for i in range(num_images):
axes[0, i].imshow(v0[i].view(28, 28).detach().numpy(), cmap='gray')
axes[1, i].imshow(v_k[i].view(28, 28).detach().numpy(), cmap='gray')
axes[0, i].axis('off')
axes[1, i].axis('off')
plt.show()
display_reconstruction(rbm, test_loader)
运行结果:
Epoch 1/10, Loss: 0.927296216373558
Epoch 2/10, Loss: 0.9289948132250097
Epoch 3/10, Loss: 0.9284022589268146
Epoch 4/10, Loss: 0.9277208608952198
Epoch 5/10, Loss: 0.9270475412525021
Epoch 6/10, Loss: 0.9267477485059382
Epoch 7/10, Loss: 0.9266238975358176
Epoch 8/10, Loss: 0.9262511341960042
Epoch 9/10, Loss: 0.9246195605427593
Epoch 10/10, Loss: 0.9238044374525011
7. 总结
本文介绍了RBM模型的原理,并使用PyTorch框架实现了一个简单的RBM模型。我们展示了如何构建模型,加载样例数据进行训练,并在训练完成后进行测试。
需要注意的是,RBM模型在现代深度学习中的应用已经较少,很多任务可以通过其他神经网络模型(如卷积神经网络、循环神经网络)达到更好的效果。但了解RBM模型及其原理对理解深度学习的发展历程具有重要意义。
受限玻尔兹曼被广泛运用在各种领域中,以下是其中的一些应用场景:
图像处理和计算机视觉:RBM 可以用于图像特征提取、图像分类、图像生成等任务,例如人脸识别、手写数字识别等。
语音识别:RBM 可以用于建立声学模型,从而提高语音识别的准确性和鲁棒性。
自然语言处理:RBM 可以用于语义表示、文本分类、机器翻译等任务。
推荐系统:RBM 可以用于用户画像建模、商品推荐等场景,从而提供更精准的个性化推荐服务。
数据分析和挖掘:RBM 可以用于数据特征提取、异常检测、聚类分析等任务,例如金融数据分析、医疗数据分析等。