概述
执行器性能分为横向性能和纵向性能,横向性能主要指方向盘转向的响应性能,纵向主要包括油门加速性能及刹车减速性能。其中横向性能在ADAS中涉及的功能包括LKA、LDW,跟纵向加/减速性能相关的功能主要是ACC(自适应巡航),纵向减速相关的主要是AEB(自动紧急制动)功能。
需求描述(以横向为例)
性能要求
性能要求针对阶跃输入、正弦输入、斜坡输入三种工况。
①阶跃响应
角度请求输入示意图如下:

图中绿色线条表示发送的请求角度值,蓝色线条代表实际相应的角度变化,关键性能要求参数说明及指标如下表所示:
| 参数名称 | 解释说明&性能指标 |
|---|---|
| A_req | 转向角度请求值。ADAS发出的角度请求稳态值 |
| Ess(Steady state error) | 稳态误差,实际转角平稳后与角度请求值得偏差计算公式:(响应结果稳态值-请求值)÷请求值性能指标:Ess≤3% |
| Delay time——Td1 | 初始响应延迟时间请求发送的时刻到响应值达到请求值5%所用的时间性能指标:Td1<50ms |
| Delay time——Td | 请求值响应延迟时间,从角度请求达到稳定值的时刻,到方向盘实际转角达到目标值97%的时间性能指标:Td≤100ms |
| Setting time——Ts | 稳定时间,从角度请求达到目标值的时刻到实际响应达到稳态误差极限之间的时间性能指标:Ts≤200ms |
| Overshoot | 超调量,实际响应角度峰值与稳态角度请求的差值性能指标:Overshoot≤A_req*10% |
| T3 | 超调时间性能指标:T3≤50ms |
②正弦角度响应

性能要求参数说明及指标如下表所示:
| 参数名称 | 解释说明&性能指标 |
|---|---|
| Areq_max_l | 向左请求角度峰值 |
| Areq_max_r | 向右请求角度峰值 |
| θmax_left | 左转角峰值,角度正弦输入下向左转角的响应峰值 |
| θmax_right | 右转角峰值,角度正弦输入下向右转角的响应峰值 |
| Ainv_left | 左回转角度,方向盘转角达到左转角峰值后开始回转的对应的角度请求值 |
| Ainv_right | 右回转角度,方向盘转角达到由转角峰值后开始回转的对应的角度请求值 |
| Td1 | 转角响应延迟时间请求发送的时刻到响应值达到请求值5%所用的时间性能指标:Td1<50ms |
| Overshoot | 超调量,实际响应角度峰值与稳态角度请求的差值性能指标:Overshoot≤幅值*10% |
| Td | 实际转角峰值响应时间差值,请求角度峰值到响应角度峰值时间差性能指标:Td≤100ms |
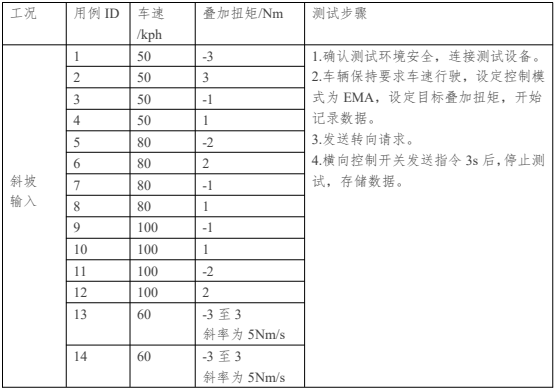
③斜坡响应

性能要求参数说明及指标如下表所示:
| 参数名称 | 解释说明&性能指标 |
|---|---|
| T_req | 转向扭矩请求值。ADAS发出的扭矩请求稳态值 |
| Delay Time T_rsp1 | 从扭矩输出到电机端扭矩响应达到请求值的5%的延迟时间性能指标:T_rsp1<50ms |
| Delay Time T_rsp2 | 从扭矩输出到转向角响应到请求值的5%的延迟时间性能指标:T_rsp2<120ms |
| T_rasie | 电机端扭矩从响应到请求值的5%到最大值的97%的时间性能指标:T_raise<200ms |
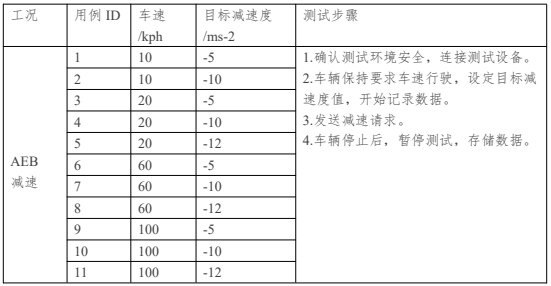
测试用例




总结
执行控制是自动驾驶真正落地的基础,感知定位如同驾驶员的眼睛,规划决策相当于驾驶员的大脑,而执行器就好比驾驶员的手脚,并且规划决策无法和执行控制剥离,对执行器缺乏了解,决策就无从做起。
如文章开头所说,执行器包括横向控制(即转向控制)和纵向控制(即速度控制),当前研究的比较多也是横向控制,通俗地讲,横向控制为给定一个车速,通过控制转向达到车辆沿着预定轨迹行驶的目的,而纵向控制的目的是为了满足车辆行驶过程中的速度要求,有时还需要配合横向控制达到满足车辆在轨迹跟踪的同时,还需要满足安全性、稳定性和舒适性的目的。因为车辆是一个特别复杂的系统,横向、纵向都有耦合关系的存在,因此就需要对自动驾驶车辆进行横纵向及其协同控制测试。
最后:
可以到我的个人号:atstudy-js,可以免费领取一份10G软件测试工程师面试宝典文档资料。以及相对应的视频学习教程免费分享!其中包括了有基础知识、Linux必备、Mysql数据库、抓包工具、接口测试工具、测试进阶-Python编程、Web自动化测试、APP自动化测试、接口自动化测试、测试持续集成、测试架构开发测试框架、性能测试等。
这些测试资料,对于做【软件测试】的朋友来说应该是最全面最完整的备战仓库,这个仓库也陪伴我走过了最艰难的路程,希望也能帮助到你!