0.简介
对于Unity而言,其拥有非常完备的物理特性,这对于机器人仿真是非常有用的,但是实际上Unity和ROS之间的通信一直是摆在两者之间的难题,正好看到宇宙爆肝锦标赛冠军写的这个系列,所以个人想参照为数不多的资料来进行整理,并完成这个系列的文章。“Unity Robotics Hub”是一种基于Unity环境的机器人模拟工具、教程、资源以及文档信息的资料库。机器人工作者可以在模拟场景中使用Unity。
1. 环境安装
1.1 安装 Docker
卸载旧的docker版本
sudo apt-get update
sudo apt-get remove docker docker-engine docker.io containerd runc
允许apt命令可以使用HTTPS访问Docker repository
sudo apt-get install apt-transport-https ca-certificates curl gnupg-agent software-properties-common
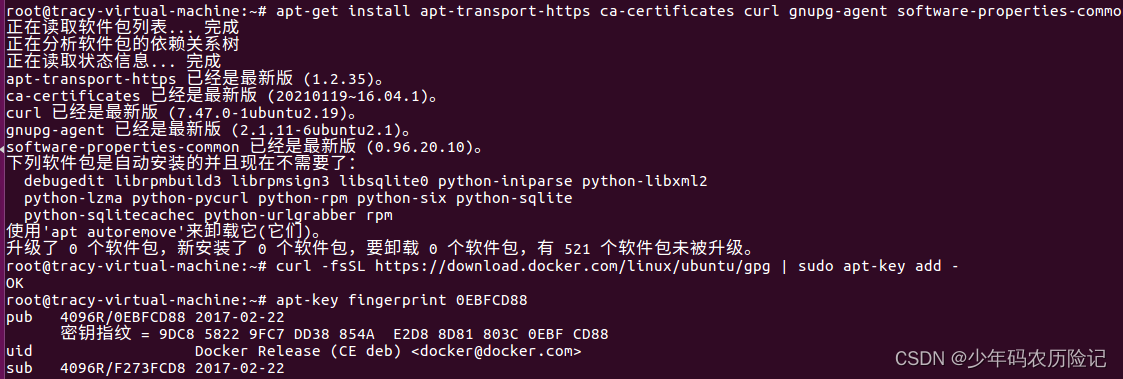
添加Docker官方的GPG key
sudo curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -

验证key(搜索后8位即可显示完成秘钥):
sudo apt-key fingerprint 0EBFCD88
设置repository版本为stable并更新软件列表
sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
sudo apt-get update
开始安装docker
sudo apt-get install docker-ce docker-ce-cli containerd.io
安装完成后,在命令行输入docker --version;出现docker版本信息即表示安装成功。
1.2 Unity安装
从官网(Unity官网)下载Unity Hub。

或者直接通过命令行安装
sudo sh -c 'echo "deb https://hub.unity3d.com/linux/repos/deb stable main" > /etc/apt/sources.list.d/unityhub.list'
wget -qO - https://hub.unity3d.com/linux/keys/public |
sudo apt-key add -
sudo apt updatesudo apt-get install unityhub
然后安装安装Unity Editor,进入网址。然后点Unity Editor就行。接着把下载好文件的解压。然后打开Unity Hub,点Locate,选择你Unity Editor文件夹下的Unity即可

2. 安装Unity Robotics包
这个小节用来提供关于安装Unity Robotics软件包的简短说明。
-
创建或打开一个Unity项目,值得注意的是如果需要添加URDF-Importer,请确保你使用的是2020.2.0+版本的Unity Editor。
-
打开Window -> Package Manager菜单
-
在Package Manager窗口中,找到并单击窗口左上角的+按钮。选择Add package from git URL…
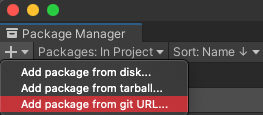
-
输入所需包的git URL。注意:你可以在git url的末尾添加一个版本标签,比如#v0.4.0或#v0.5.0,来声明一个特定的包版本,或者排除这个标签来从包的主分支获取最新的版本。
- 对于ROS-TCP-Connector,输入https://github.com/Unity-Technologies/ROS-TCP-Connector.git?path=/com.unity.robotics.ros-tcp-connector
- 对于URDF-Importer,输入https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer
-
点击 Add.
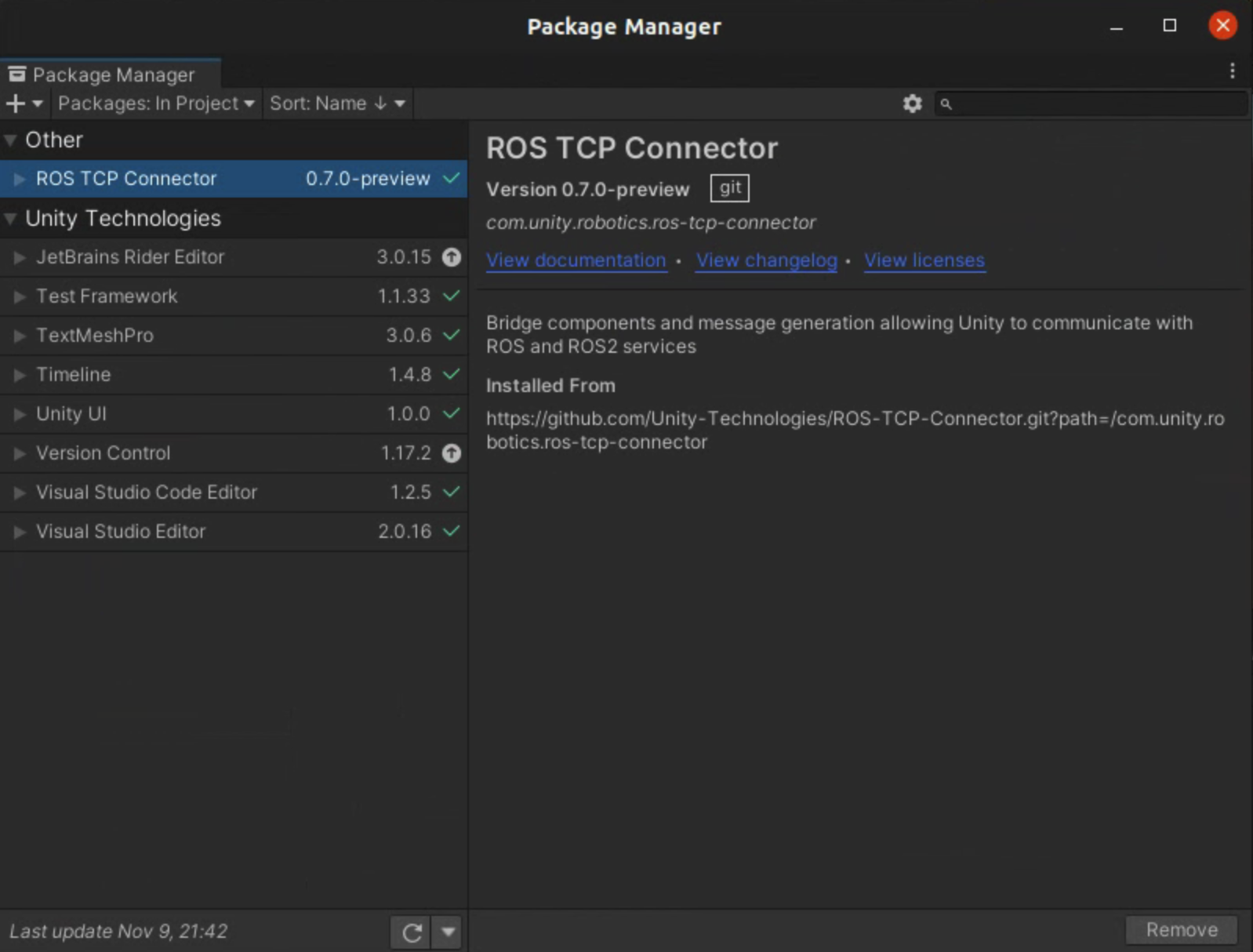
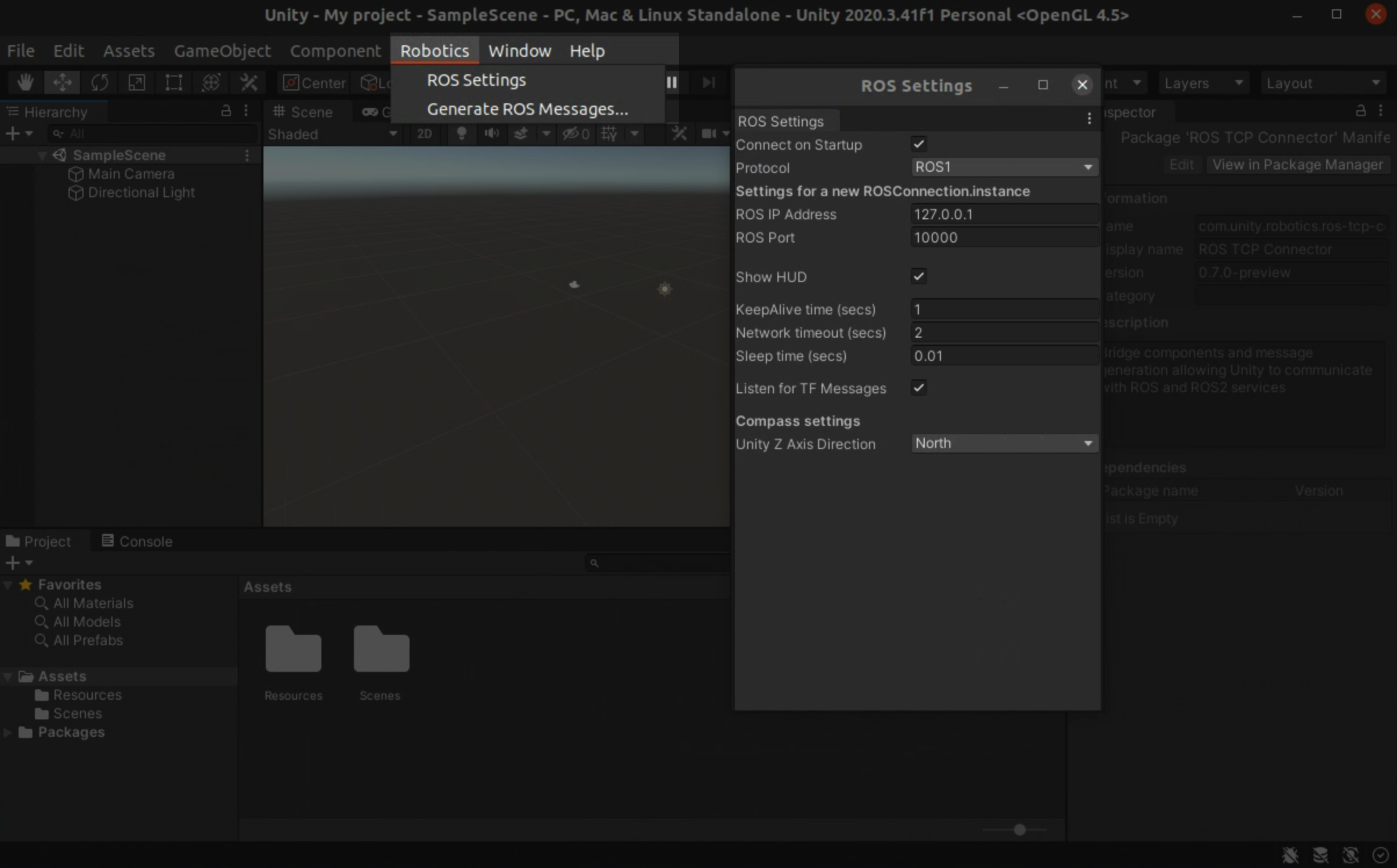
在上面项目导入成功的情况下,在Unity的功能面部中会出现对应的Robotics功能选项,点击Robotics->ROS Setting面板
3. Unity Robotics Hub安装
开发环境的需要的环境如下:
- Unity版本2020.2+
- URDF导入的repo
- 拥有ROS环境
接着就可以开始安装环境了
git clone --recurse-submodules https://github.com/Unity-Technologies/Unity-Robotics-Hub.git
下面官方文档中提供了两种方法,第一种是使用Docker,另外一种就是直接在本地安装环境。
3.1 Docker安装
启动Docker守护进程。我们可以使用系统无关的docker info命令可以验证docker是否正在运行。如果Docker守护进程当前没有运行,此命令将抛出Server: ERROR,否则将打印适当的系统范围信息。
构建提供的ROS Docker映像:
cd /PATH/TO/Unity-Robotics-Hub/tutorials/pick_and_place &&
git submodule update --init --recursive &&
docker build -t unity-robotics:pick-and-place -f docker/Dockerfile .
这里提供的Dockerfile使用ROS Melodic基本镜像并安装必要的包,将提供的ROS包和子模块复制到容器中,并构建ROS工作区。
启动新建的Docker容器
docker run -it --rm -p 10000:10000 unity-robotics:pick-and-place /bin/bash
3.2 手动设置
导航到这个下载的repo的/PATH/ to /Unity-Robotics-Hub/tutorials/pick_and_place/ROS目录,然后在ROS Melodic环境中运行以下命令
sudo apt-get update && sudo apt-get upgrade
sudo apt-get install python-pip ros-melodic-robot-state-publisher ros-melodic-moveit ros-melodic-rosbridge-suite ros-melodic-joy ros-melodic-ros-control ros-melodic-ros-controllers ros-melodic-tf2-web-republisher
sudo -H pip install rospkg jsonpickle
ROS Noetic用户应运行
sudo apt-get update && sudo apt-get upgrade
sudo apt-get install python3-pip ros-noetic-robot-state-publisher ros-noetic-moveit ros-noetic-rosbridge-suite ros-noetic-joy ros-noetic-ros-control ros-noetic-ros-controllers
sudo -H pip3 install rospkg jsonpickle
如果您在导入新的ROS包之后还没有构建和源化ROS工作区,请导航到您的ROS工作区,并运行catkin_make && source devel/setup.bash。确保没有错误。
3.3 ros_tcp_endpoint
打开一个容器的终端,导航到 ~/catkin_ws ,执行
source devel/setup.bash
roslauch ros_tcp_endpoint endpoint.launch tcp_ip:=127.0.0.1 tcp_port:=10000 # 将127.0.0.1替换为所需的ip,将10000替换为所需要的端口号。
4. URDF文件导入
为了检查整个物理模型是否导入,我们需要检查以下几点项目设置:
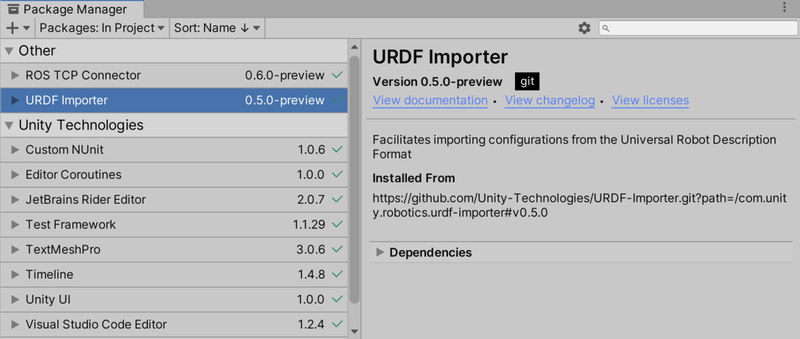
打开菜单“Window→Package Manager”,确认是否导入了“URDF Importer”(在上面已经完成安装)。在Unity中导入“URDF”,使用“URDF Importer”。
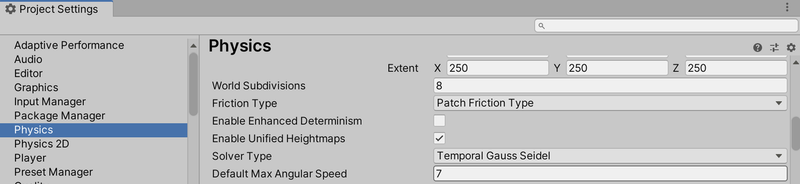
在菜单“Edit→Project Settings→Physics”中确认“SolverType”是“TemporalGaussSeidel”。以防止关节不稳定的动作由默认的求解器引起。
然后下面就是对场景进行设置:
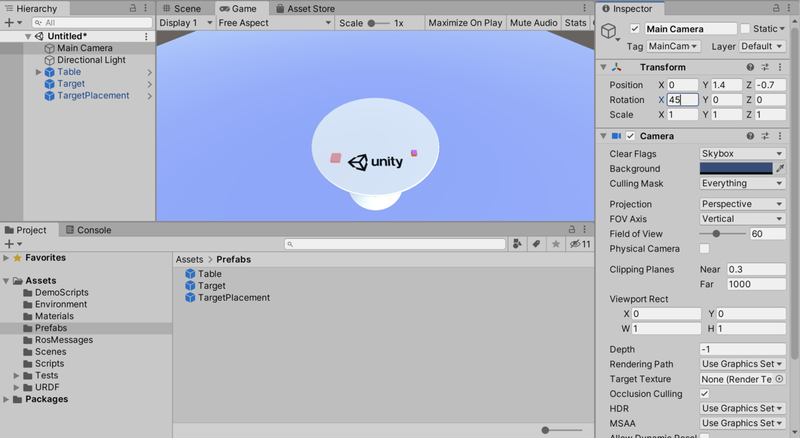
- 将“Asssets/Prefabs”中的“Table”、“Target”、“TargetPlacement”拖拽到Hierarchy窗口。
- 将MainCamera的Transform设定如下。
・Position : (0, 1.4, -0.7)
・Rotation : (45, 0, 0)
・Rotation : (1, 1, 1)
接下来导入URDF
- 在Project窗口右键点击URDF文件“Assets/niryo_one/niryo_one”,选择“Import Robot form Selected URDF file”
…详情请参照古月居
``` 成功后,会显示以下信息[INFO] [1634298752.158262]: Starting server on 172.17.0.2:10000
-
在Unity编辑器中按Play按钮。
-
按Publish键。相关数据会在ROS主题中公布。
-
确认正在运行roslaunch的终端。并输出了相关数据。
I heard:
joints: [-0.00016236382361967117, -0.007215713616460562, -0.0010509941494092345, 0.01564762368798256, 0.00016680661065038294, 0.00013635685900226235]
pick_pose:
position:
x: -0.157005697489
y: -0.216008037329
z: 0.643718481064
orientation:
x: -1.49643722125e-06
y: -0.707106769085
z: 1.49643722125e-06
w: -0.707106769085
place_pose:
position:
x: -0.187000006437
y: 0.216000005603
z: 0.639999985695
orientation:
x: -0.499999970198
y: -0.499999970198
z: 0.499999970198
w: -0.499999970198
我们看一下代码就可以发现在,代码中我们发布了NiryoMoveitJointsMsg。这个msg信息中保存着以下信息。
·Joint的角度(float[])
·Target姿势(vector+quaternion)
·TargetPlacement的姿势(vector+quaternion)
下面是本例子的注释
using System;
using RosMessageTypes.Geometry;
using RosMessageTypes.NiryoMoveit;
using Unity.Robotics.ROSTCPConnector;
using Unity.Robotics.ROSTCPConnector.ROSGeometry;
using Unity.Robotics.UrdfImporter;
using UnityEngine;
// 发布者
public class SourceDestinationPublisher : MonoBehaviour
{
// 关键数
const int k_NumRobotJoints = 6;
// tf
public static readonly string[] LinkNames =
{ "world/base_link/shoulder_link", "/arm_link", "/elbow_link", "/forearm_link", "/wrist_link", "/hand_link" };
// Topic节点名称
[SerializeField]
string m_TopicName = "/niryo_joints";
// 作为object传入的参数
[SerializeField]
GameObject m_NiryoOne;
[SerializeField]
GameObject m_Target;
[SerializeField]
GameObject m_TargetPlacement;
readonly Quaternion m_PickOrientation = Quaternion.Euler(90, 90, 0);
// 关节
UrdfJointRevolute[] m_JointArticulationBodies;
// ROS连接命名
ROSConnection m_Ros;
void Start()
{
// ROS连接准备
m_Ros = ROSConnection.GetOrCreateInstance();
// 发布者的生成
m_Ros.RegisterPublisher<NiryoMoveitJointsMsg>(m_TopicName);
// 关节信息获取
m_JointArticulationBodies = new UrdfJointRevolute[k_NumRobotJoints];
var linkName = string.Empty;
for (var i = 0; i < k_NumRobotJoints; i++)
{
linkName += LinkNames[i];
m_JointArticulationBodies[i] = m_NiryoOne.transform.Find(linkName).GetComponent<UrdfJointRevolute>();
}
}
// パ发布的程序
public void Publish()
{
// 信息的定义
var sourceDestinationMessage = new NiryoMoveitJointsMsg();
// Joint角度的传输
for (var i = 0; i < k_NumRobotJoints; i++)
{
sourceDestinationMessage.joints[i] = m_JointArticulationBodies[i].GetPosition();
}
// Target姿态的传输
sourceDestinationMessage.pick_pose = new PoseMsg
{
position = m_Target.transform.position.To<FLU>(),
orientation = Quaternion.Euler(90, m_Target.transform.eulerAngles.y, 0).To<FLU>()
};
// TargetPlacement姿态的传输
sourceDestinationMessage.place_pose = new PoseMsg
{
position = m_TargetPlacement.transform.position.To<FLU>(),
orientation = m_PickOrientation.To<FLU>()
};
// 根据connection发布topic
m_Ros.Publish(m_TopicName, sourceDestinationMessage);
}
}
7. 参考链接
https://github.com/Unity-Technologies/Unity-Robotics-Hub
https://www.guyuehome.com/40908
https://codeantenna.com/a/I1dRyJjemI
https://github.com/Unity-Technologies/Robotics-Object-Pose-Estimation
https://github.com/Unity-Technologies/articulations-robot-demo







![[附源码]JAVA毕业设计商店管理系统(系统+LW)](https://img-blog.csdnimg.cn/ba5d80ad14594762a31e6751003f0042.png)