-
为节约带宽提高效率采用jpeg:
sensor_msgs::CompressedImage image_msg;
ros::Publisher img_pub = n.advertise<sensor_msgs::CompressedImage>(“image1”, 10);
image_msg.format=“jpeg” ;
image_msg.data.resize(jpeg_data_size);
memcpy(image_msg.data.data(),jpeg_data,jpeg_data_size);
image_msg.header.frame_id = “camera”;
image_msg.header.stamp.sec = img_ts/1000000;
image_msg.header.stamp.nsec = img_ts%1000000*1000;
img_pub.publish(image_msg); -
为可视化调试将sensor_msgs::CompressedImage解压重发布为sensor_msgs::Image,命令如下(假如image1是jpeg,image2是raw):
rosrun image_transport republish compressed in/compressed:=image1 out:=/camera_ligrip/image2 -
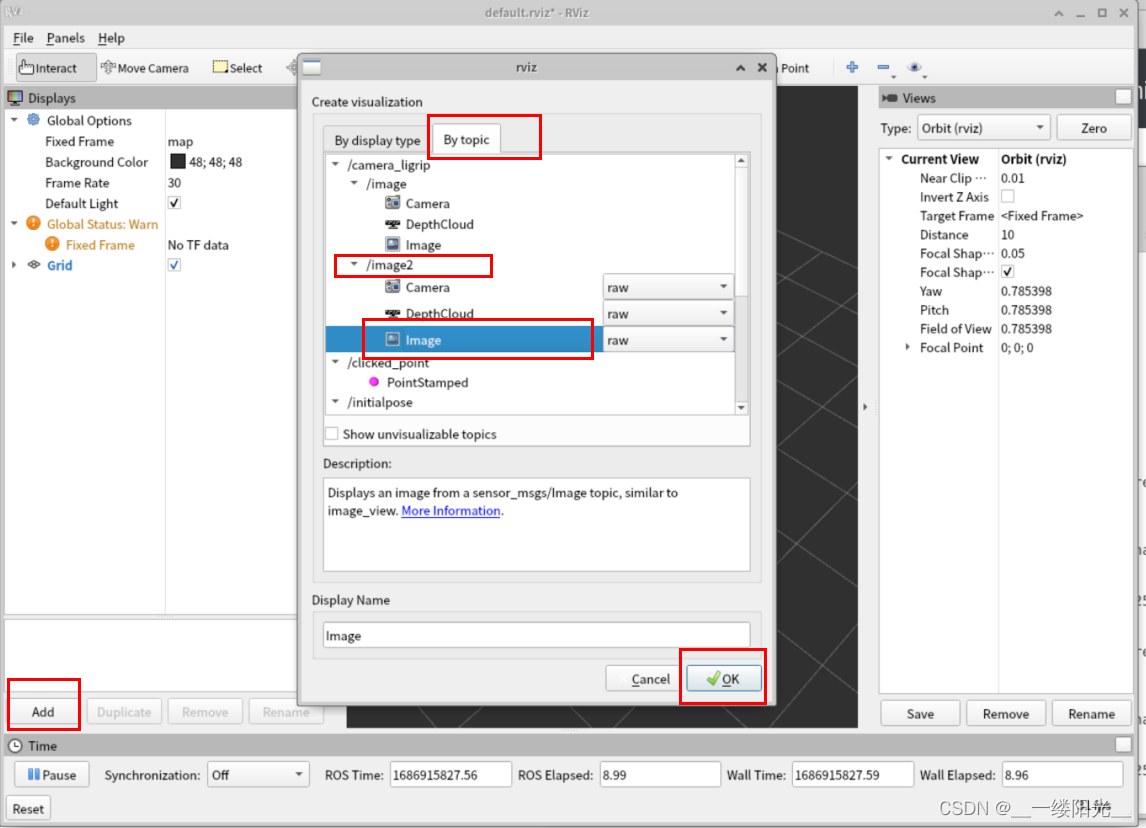
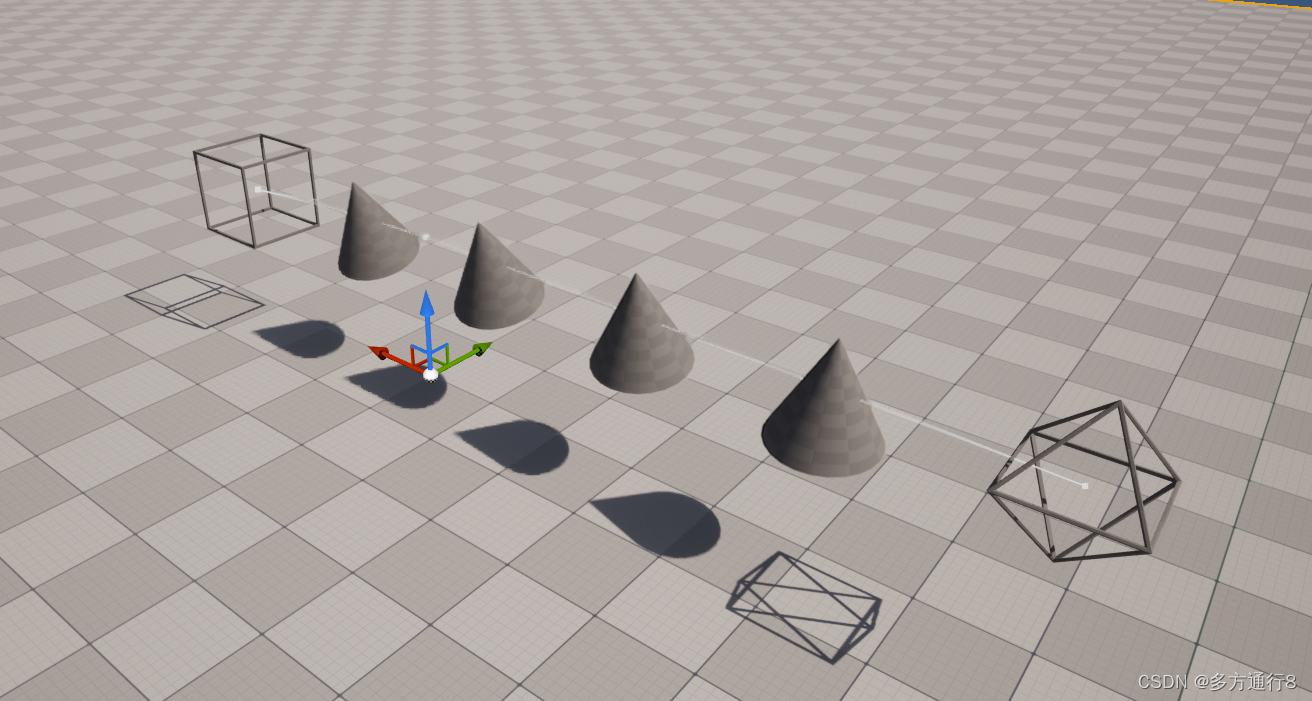
启动可视化工具
rosrun rviz rviz
软件界面 左下角Add-> By topic选中重发布的topic Image节点 -> OK
ROS1 图像数据转发
news2026/2/13 20:55:42
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/653993.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

【CUDA编程】 动态体素化实现
动态体素化实现
动态体素化DV克服了硬体素化HV的一些缺点。动态体素化DV保留了分组grouping阶段,相反,它没有采样固定的点数或体素容量,它保留了点和体素之间的完全映射。因此,体素数和每个体素中的点数都是动态的,依…

深入理解 SpringBoot 日志框架:从入门到高级应用——(七)SpringBoot日志配置
SpringBoot 官方文档:https://docs.spring.io/spring-boot/docs/2.7.12/reference/htmlsingle
SpringBoot 底层依赖
Spring Boot 对所有内部日志记录使用 Commons Logging,但使底层日志实现保持为打开状态。 为 Java Util Logging、Log4J2 和 Logback …

【计算机网络自顶向下】如何学好计网-第一章概论
相关术语
URI:Uniform Resource Identifier 统一资源标识符,指的是一个资源
URL:Uniform Resource Location 统一资源定位符,URI的子集,用地址定为的方式指定一个资源
URN:Uniform Resource Name 统一资…
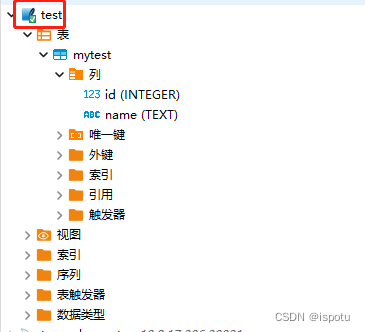
DBeaver连接SQLite数据库
一、前言
SQLite小巧轻便的开源免费关系型数据库,适合嵌入单机应用随身携带。桌面版推荐使用DBeaver。
官网:SQLite Download Page
github:GitHub - sqlite/sqlite: Official Git mirror of the SQLite source tree
类似的开源免费且小巧…
vue+elementui实现app布局小米商城,样式美观大方
目录 一、效果图
1.首页效果图
2.分类
3.购物车 4.我的
5.登录注册
6.商品详情
7.搜索
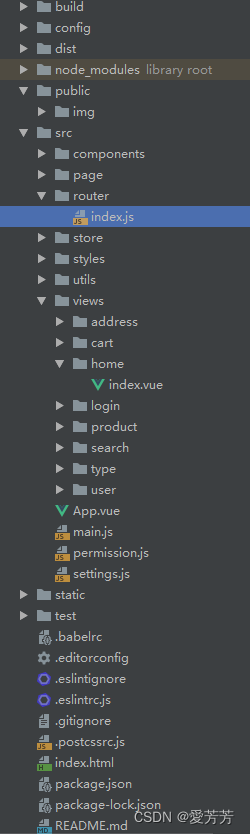
二、项目实现
1.项目结构、设计说明 2.路由配置实现
3.首页实现源码
4.登录注册实现,模拟登录注册流程,用户数据存储到本地浏览器缓存
三、总结 一、效果…
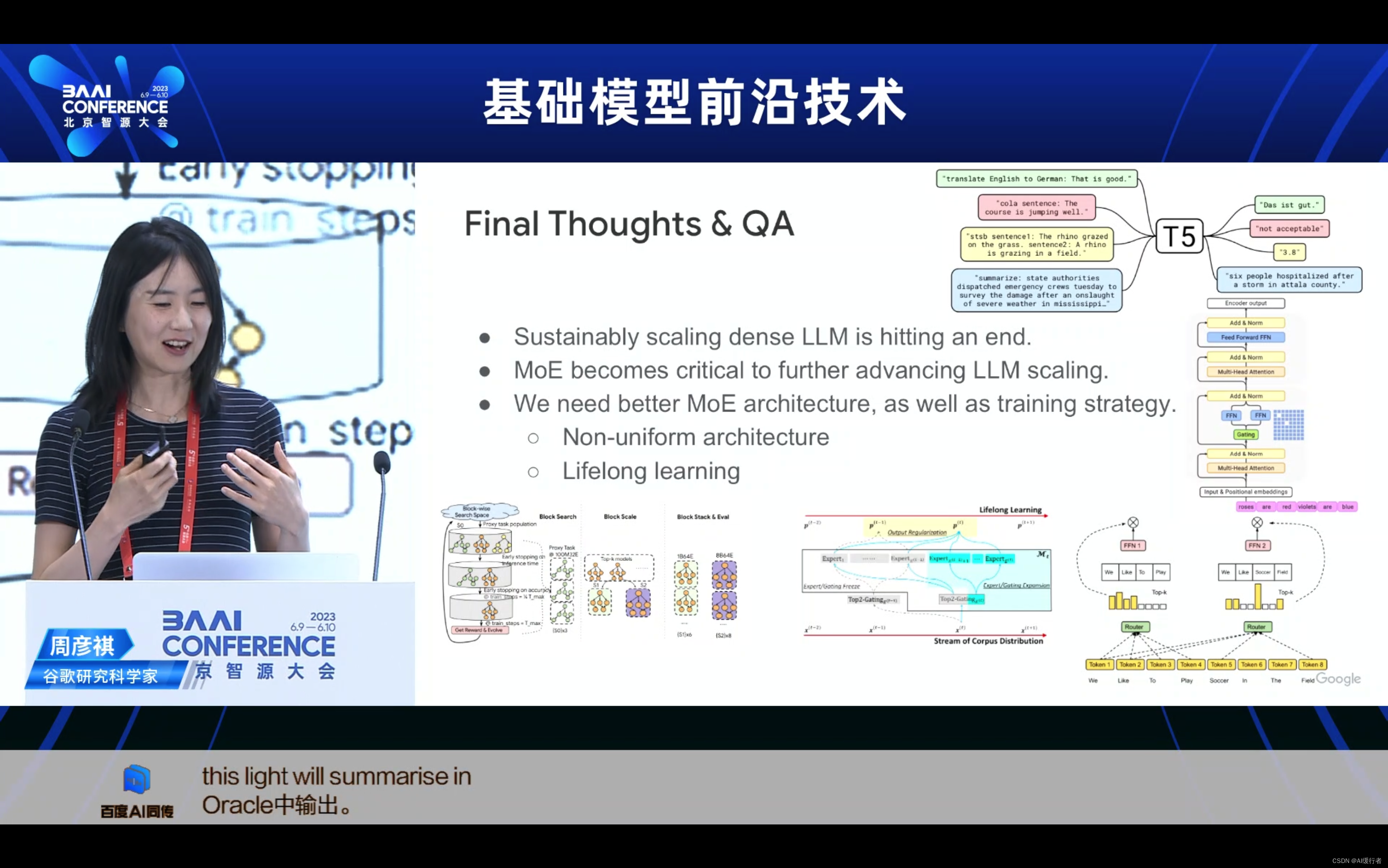
『2023北京智源大会』开幕式以及基础模型前沿技术论坛
『2023北京智源大会』开幕式以及基础模型前沿技术论坛 文章目录 一. 黄铁军丨智源研究院院长1. 大语言模型2. 大语言模型评测体系FlagEval3. 大语言模型生态(软硬件)4. 三大路线通向 AGI(另外2条路径) 二. Towards Machines that can Learn, Reason, and Plan(杨立昆丨图灵奖得…
UE4/5样条线学习(四):样条线的创建和自然摆动
这一次我们创建一个actor蓝图,不过我们这次并不需要在一开始就创建样条线组件,而是在游戏中根据两个点去创建样条线,然后用时间轴根据样条线带动物品旋转位移。 制作:
组件部分:
第一步,创建一个actor蓝图…

CSDN铁粉增长秘籍
🎈个人主页:🎈 :✨✨✨初阶牛✨✨✨ 🐻推荐专栏1: 🍔🍟🌯C语言初阶 🐻推荐专栏2: 🍔🍟🌯C语言进阶 🔑个人信条: 🌵知行合一 …

【Jmeter】在进行综合场景压测时,由于不同的请求,要求所占比例不同,那如何实现呢?
在进行综合场景压测时,由于不同的请求,要求所占比例不同,那如何实现呢?
有人说将这些请求分别放到单独的线程组下,然后将线程组的线程数按照比例进行配置,这种方法不是很好,想想,不…

【计算机网络自顶向下】如何学好计网-第二章应用层
第二章 应用层
应用层协议原理 网络应用程序体系结构
客户机/服务器体系结构:至少有一个服务器,一个客户机,其中服务器总是打开的,具有固定的众所周知的IP地址,主机群集常被用于创建强大的虚拟服务器,而客…
OpenCV 笔记_1
笔记_1 文章目录 笔记_1Mat类数据类型读取Mat类支持的运算图像读取,显示,保存imread 图像读取namedWindow 创建要显示的窗口imshow 窗口显示imwrite 图像保存 视频加载与摄像头的使用VideoCapture 加载视频或摄像头get 获取属性VideoWriter 保存视频 图像…

实际项目中使用gorm-gen来生成实体类
一、为什么要使用gorm-gen来生成实体类和查询 1、根据gorm官网地址,正常的写法是先写数据模型,然后由数据模型自动同步生成到数据库中,但是这样的工作量会比较大,对于写后端的人来说都熟悉sql语句,正常来说都是先自己手动创建表,利用工具将表字段同步到项目实体类中…
java商业销售分析系统Myeclipse开发mysql数据库web结构jsp编程计算机网页项目
一、源码特点 java 商业销售分析系统是一套完善的java web信息管理系统,对理解JSP java编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为TOMCAT7.0,Myeclipse8.5开发,数据库为Mysql5.0&…

电脑重装系统后需要更新哪些驱动
在电脑重装系统后,由于系统的重置,您需要重新安装和更新一些关键的驱动程序,以确保硬件设备正常工作和性能最佳化。以下是在电脑重装系统后需要更新的一些常见驱动程序。 工具/原料:
系统版本:win10系统 品牌型号&…
TOGAF10®标准中文版-(介绍和核心概念)摘要
第1章:简介
TOGAF标准是企业架构的框架。任何希望开发企业架构以在该组织内使用的组织都可以免费使用它(见第1.3.1节)。
TOGAF标准由The Open Group成员在架构论坛内开发和维护(请参阅www.opengroup.org/Architecture࿰…
java8 (jdk 1.8) 新特性——Lambda 以及函数式接口
1. 什么是lambda?
目前已知的是,有个箭头 ->
说一大段官方话,也没有任何意义
我们直接看代码:
之前我们创建线程是这样的 Runnable runnable new Runnable() {Overridepublic void run() {System.out.println("run。。。。。。…

阿里云服务器的网络性能如何?有多快?是否适合高流量应用?
阿里云服务器的网络性能如何?有多快?是否适合高流量应用? [本文由阿里云代理商[聚搜云www.4526.cn]撰写] 阿里云服务器网络性能简介 阿里云服务器(ECS)在网络性能方面表现卓越,可满足用户对高…
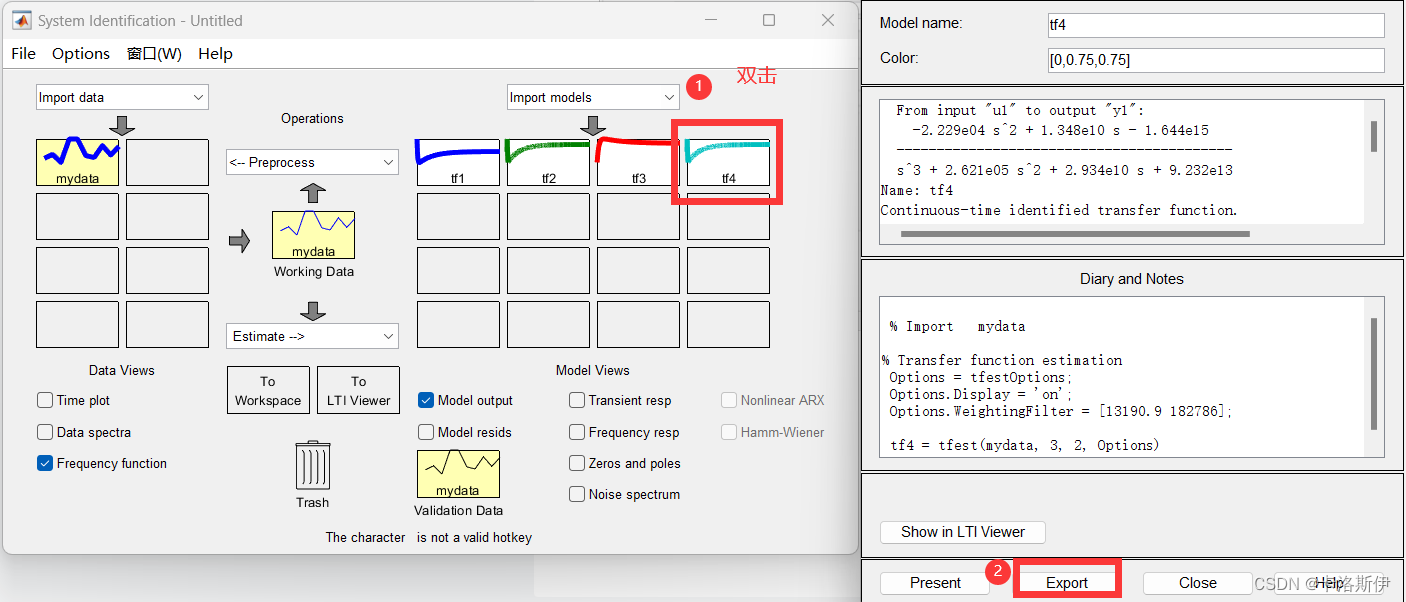
通过环路分析仪得到系统的闭环传递函数方法(Matlab System Identification)
目录 前言
环路分析仪数据整理
Matlab导入环路分析仪的数据
System Identification使用
闭环传递函数导出
总结 前言
之前开发的时候通过Matlab的环路设计工具实现了控制系统的补偿器参数整定,然后在系统硬件上面进行了验证,设计带宽和环路分析仪的…

基于Java实验中心管理系统设计实现(源码+lw+部署文档+讲解等)
博主介绍: ✌全网粉丝30W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战 ✌ 🍅 文末获取源码联系 🍅 👇🏻 精…