5.移植 RTT NANO工程
移植步骤:
1. mdk添加rtt nano 包文件
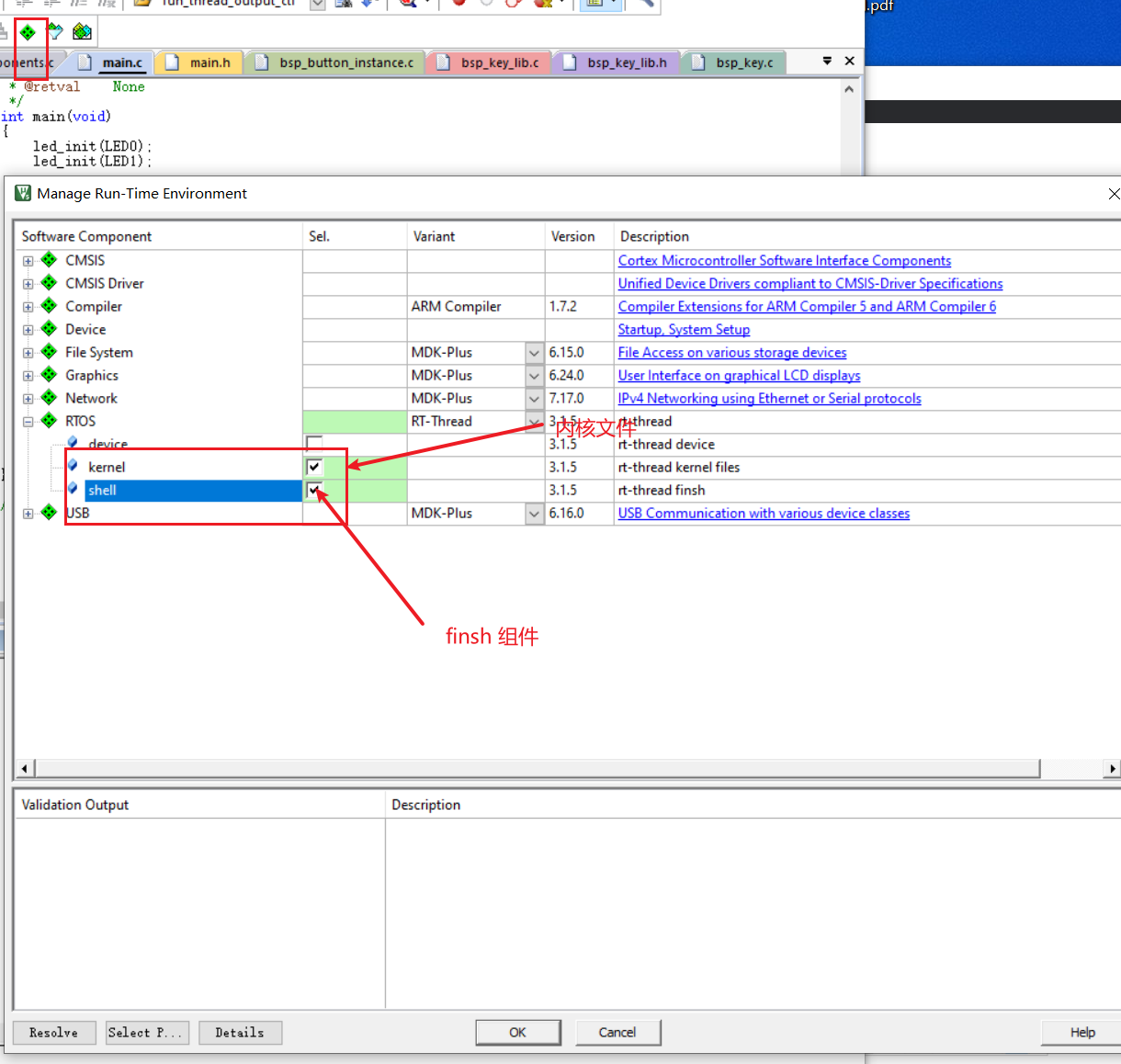
2. 添加源码
3. 屏蔽2个中断处理函数
4. 修改board.c文件
5. 添加控制台
6. 添加finsh组件
7. 编写测试工程
1. mdk添加rtt nano 包文件
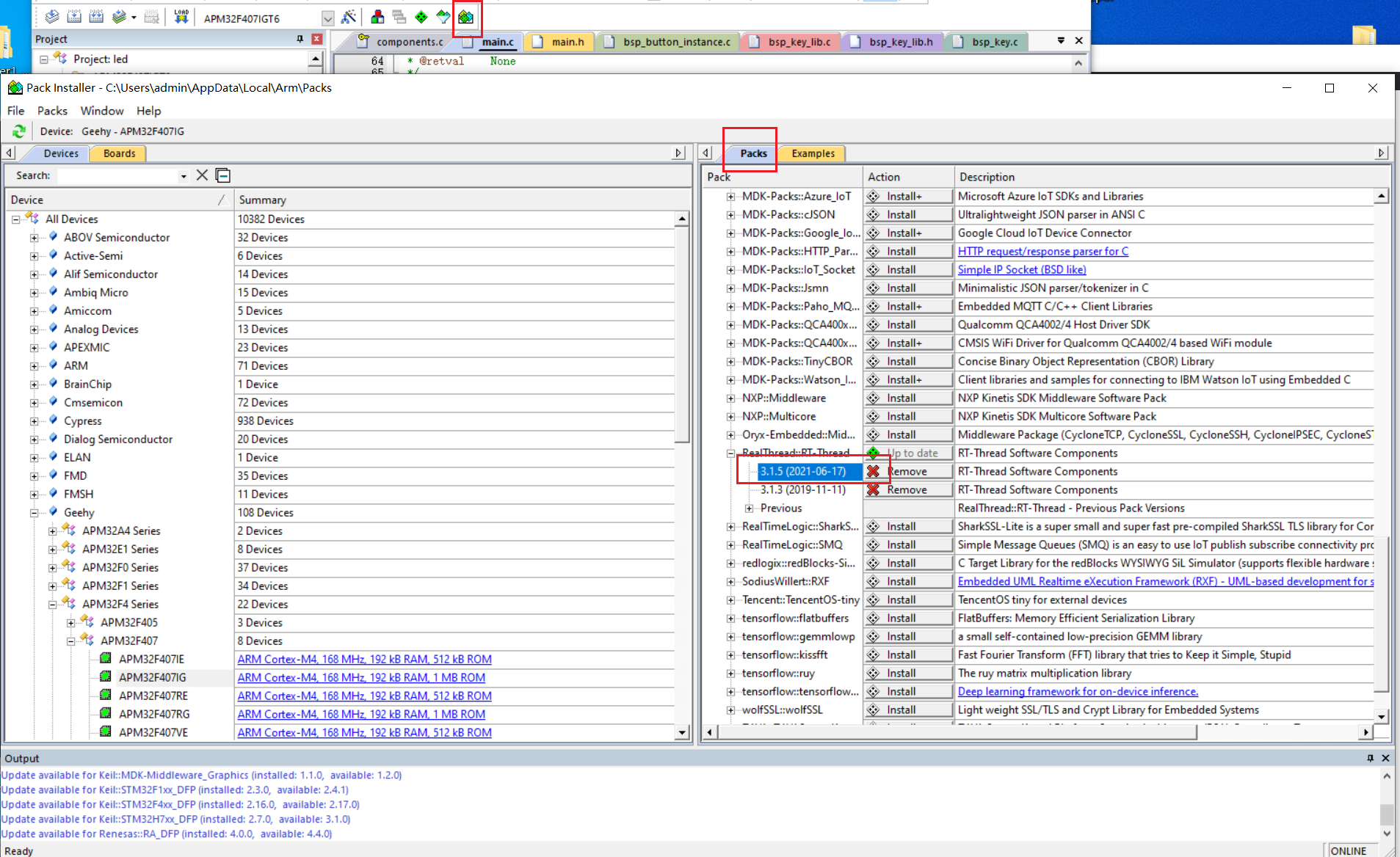
也可以下载后手动安装
下载链接https://www.rt-thread.org/download/mdk/RealThread.RT-Thread.3.1.5.pack
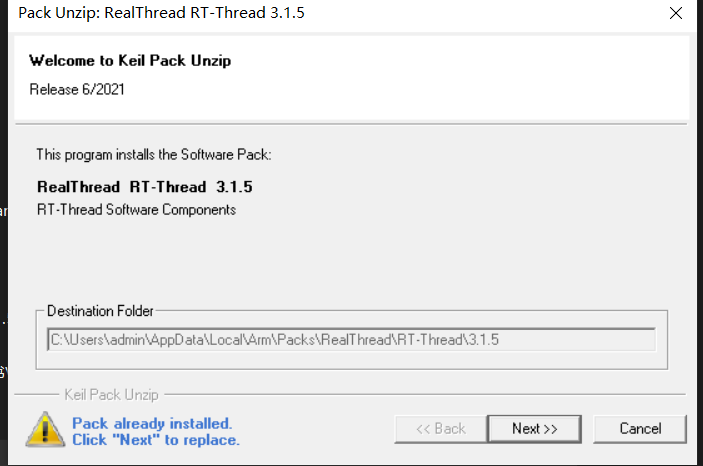
rtt nano 安装位置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-kBOttCeQ-1686746659361)(picture/image-20230614200822254.png)]](https://img-blog.csdnimg.cn/a9363951a7424840a76749bc149fba93.png)
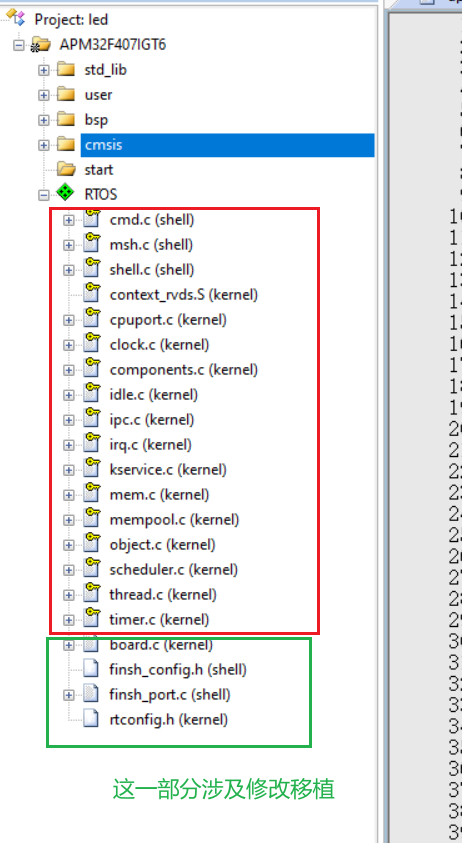
2. 添加源码到工程
添加后如下
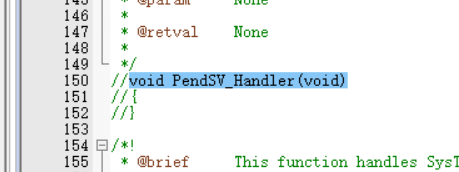
3. 屏蔽2个中断处理函数
void HardFault_Handler(void)
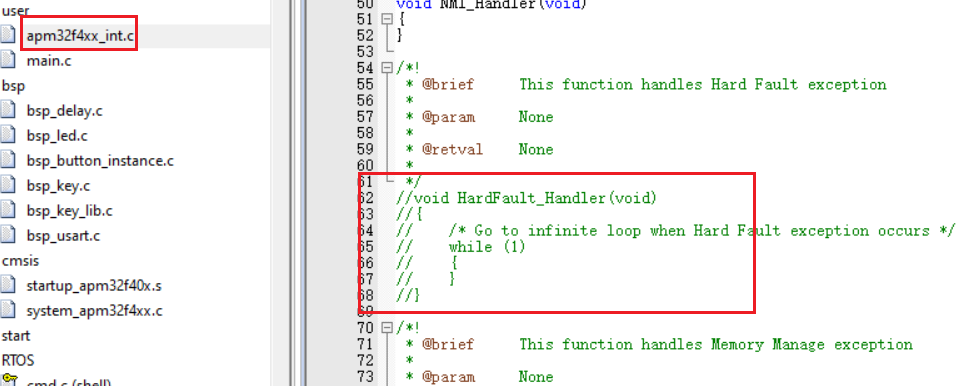
void PendSV_Handler(void)
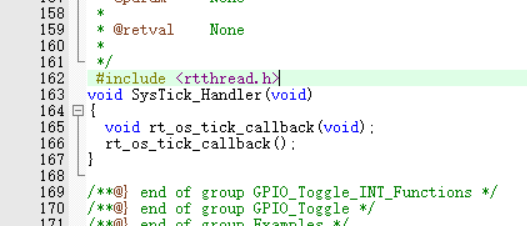
修改 systick
#include <rtthread.h>
void SysTick_Handler(void)
{
void rt_os_tick_callback(void);
rt_os_tick_callback();
}
3.修改board.c文件
合计修改3个地方
3.1 添加头文件
//添加头文件
#include "apm32f4xx.h"
#include "bsp_usart.h"
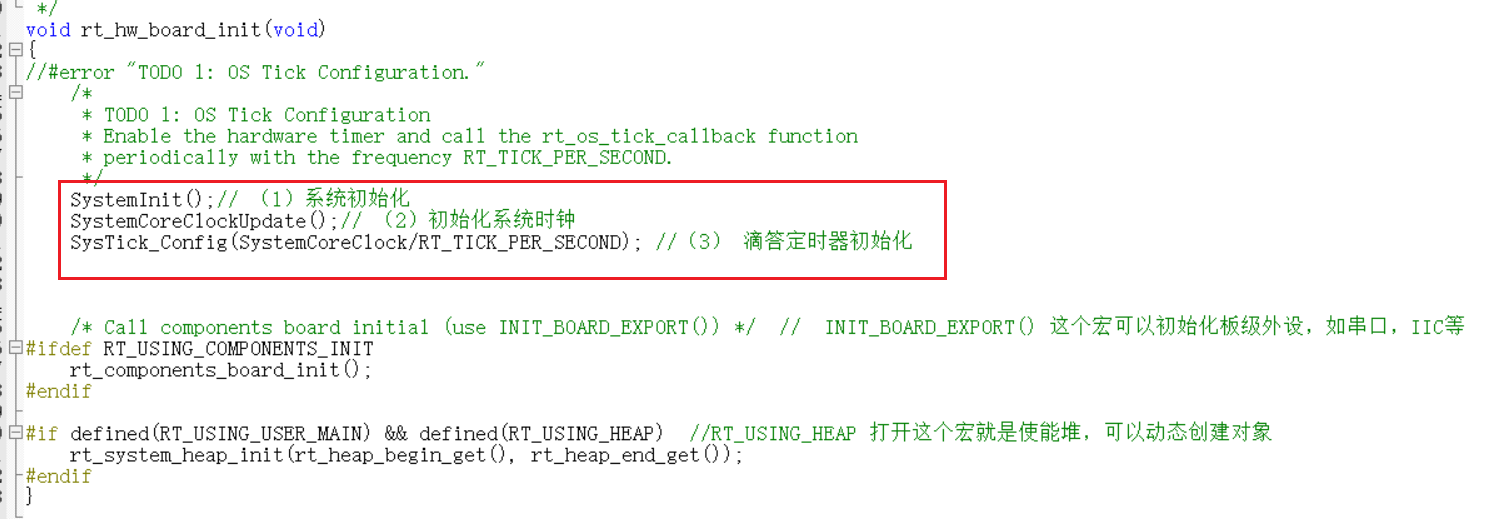
3.2 修改rt_hw_board_init 函数
SystemInit();// (1)系统初始化
SystemCoreClockUpdate();// (2)初始化系统时钟
SysTick_Config(SystemCoreClock/RT_TICK_PER_SECOND); //(3) 滴答定时器初始化
3.4 rttconfig.h 文件说明
/* RT-Thread config file */
#ifndef __RTTHREAD_CFG_H__
#define __RTTHREAD_CFG_H__
// <<< Use Configuration Wizard in Context Menu >>>
// RT_THREAD_PRIORITY_MAX 这个宏表示 RT-Thread 支持多少个优先级,取值范围为 8~256,默认为 32。
#define RT_THREAD_PRIORITY_MAX 32
//RT_TICK_PER_SECOND 表示操作系统每秒钟有多少个 tick,tick 即是操作系统的时钟周期,默认为 1000
#define RT_TICK_PER_SECOND 1000
// 表示 CPU 处理的数据需要多少个字节对齐,默认为 4 个字节
#define RT_ALIGN_SIZE 4
// 内核对象名字的最大长度,取值范围为 2~16,默认为 8。
#define RT_NAME_MAX 8
// 使用 RT-Thread 组件初始化,默认使能
#define RT_USING_COMPONENTS_INIT
// 使用用户 main 函数,默认打开
#define RT_USING_USER_MAIN
// main 线程栈大小,取值范围为 1~4086,单位为字节,默认为512。
#define RT_MAIN_THREAD_STACK_SIZE 256
// </h>
// 调试配置
// <c1>enable kernel debug configuration
// <i>Default: enable kernel debug configuration
//#define RT_DEBUG
// </c>
// <o>enable components initialization debug configuration<0-1>
// <i>Default: 0
#define RT_DEBUG_INIT 0
// <c1>thread stack over flow detect
// <i> Diable Thread stack over flow detect
//#define RT_USING_OVERFLOW_CHECK
// </c>
// </h>
// 钩子函数配置,目前全部关闭。
// <c1>using hook
// <i>using hook
//#define RT_USING_HOOK
// </c>
// <c1>using idle hook
// <i>using idle hook
//#define RT_USING_IDLE_HOOK
// </c>
// </h>
// 软件定时器配置,目前关闭,不使用软件定时器。
#define RT_USING_TIMER_SOFT 0
#if RT_USING_TIMER_SOFT == 0
#undef RT_USING_TIMER_SOFT
#endif
// <o>The priority level of timer thread <0-31>
// <i>Default: 4
#define RT_TIMER_THREAD_PRIO 4
// <o>The stack size of timer thread <0-8192>
// <i>Default: 512
#define RT_TIMER_THREAD_STACK_SIZE 512
// </e>
// 内部通信配置,包括信号量、互斥量、事件、邮箱和消息队列,根据需要配置
#define RT_USING_SEMAPHORE
// 互斥量
//#define RT_USING_MUTEX
// 事件
//#define RT_USING_EVENT
// 邮箱
#define RT_USING_MAILBOX
// 消息队列
//#define RT_USING_MESSAGEQUEUE
// </c>
// </h>
//内存管理配置。
// 这个宏用于表示是否使用内存池,目前关闭,不使用内存池。
//#define RT_USING_MEMPOOL
// 于表示是否堆,目前关闭,不使用堆
/*
通过使能或者失能 RT_USING_HEAP 这个宏来选择
使用静态或者动态内存。无论是使用静态还是动态内存方案,使用的都是内部的 SRAM,
区别是使用的内存是在程序编译的时候分配还是在运行的时候分配。
*/
#define RT_USING_HEAP
#define RT_USING_SMALL_MEM
// </c>
// <c1>using tiny size of memory
// <i>using tiny size of memory
//#define RT_USING_TINY_SIZE
// </c>
// </h>
// 控制台配置。控制台即是 rt_kprintf()函数调试输出的设备,通常使用串口
#define RT_USING_CONSOLE
//控制台缓存大小
#define RT_CONSOLEBUF_SIZE 256
// </h>
//FINSH shell 配置
#include "finsh_config.h"
// </c>
// </h>
// <h>Device Configuration
// <c1>using device framework
// <i>using device framework
//#define RT_USING_DEVICE
// </c>
// </h>
// <<< end of configuration section >>>
#endif
4. 添加控制台
4.1在uart_init中添加串口初始化函数
static int uart_init(void)
{
bsp_uart1_init(115200);
return 0;
}
4.2.添加控制台输出函数
//(4)添加控制台输出函数
void rt_hw_console_output(const char *str)
{
rt_size_t size =0;
size = rt_strlen(str);
for(int i=0;i<size;i++)
{
if(str[i]=='\n')
{
/* send a byte of data to the serial port */
USART_TxData(DEBUG_USART, (uint8_t)'\r');
/* wait for the data to be send */
while (USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_TXBE) == RESET);
}
/* send a byte of data to the serial port */
USART_TxData(DEBUG_USART, (uint8_t)str[i]);
/* wait for the data to be send */
while (USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_TXBE) == RESET);
}
}
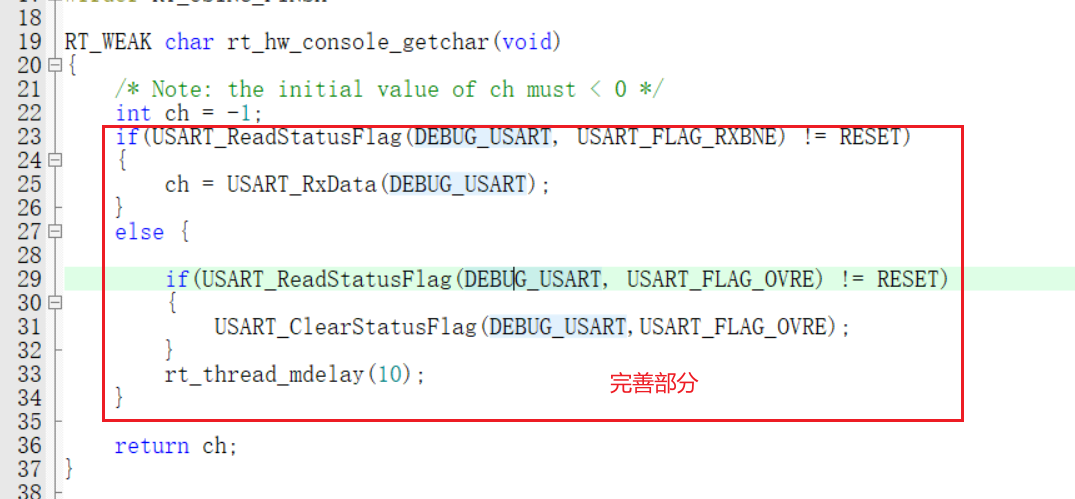
5. 添加finsh组件
在finsh_port.h 中完善串口获取数据的功能
RT_WEAK char rt_hw_console_getchar(void)
{
/* Note: the initial value of ch must < 0 */
int ch = -1;
if(USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_RXBNE) != RESET)
{
ch = USART_RxData(DEBUG_USART);
}
else {
if(USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_OVRE) != RESET)
{
USART_ClearStatusFlag(DEBUG_USART,USART_FLAG_OVRE);
}
rt_thread_mdelay(10);
}
return ch;
}
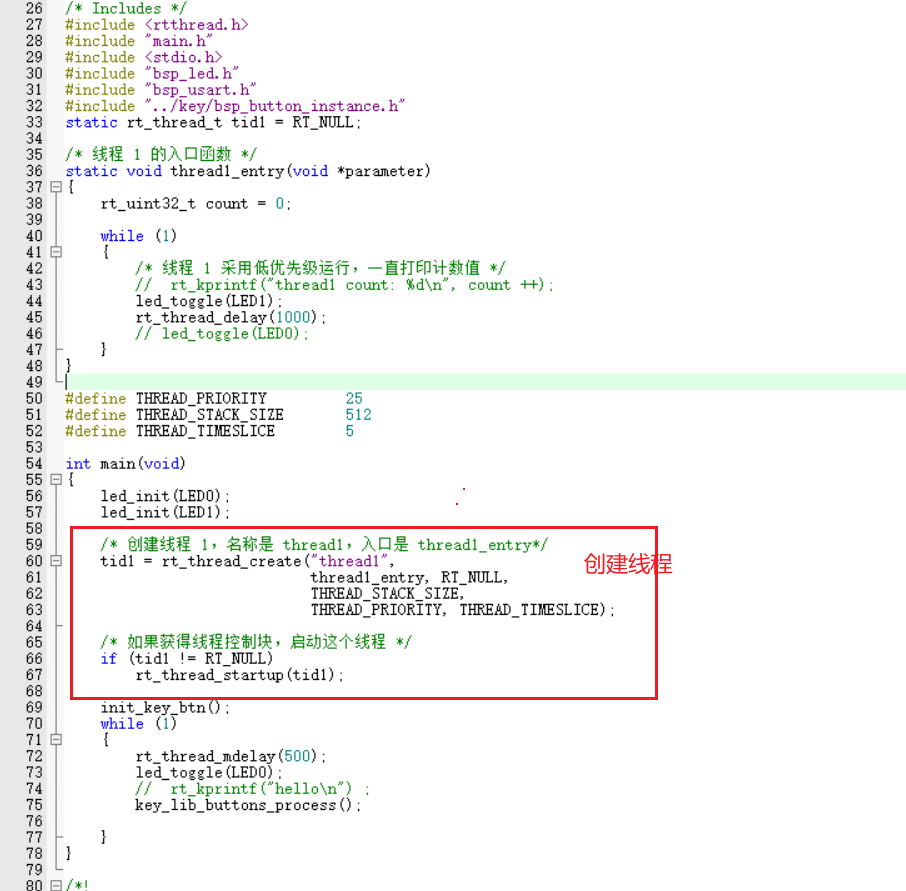
6.编写测试工程
static rt_thread_t tid1 = RT_NULL;
/* 线程 1 的入口函数 */
static void thread1_entry(void *parameter)
{
rt_uint32_t count = 0;
while (1)
{
/* 线程 1 采用低优先级运行,一直打印计数值 */
// rt_kprintf("thread1 count: %d\n", count ++);
led_toggle(LED1);
rt_thread_delay(1000);
// led_toggle(LED0);
}
}
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
int main(void)
{
led_init(LED0);
led_init(LED1);
/* 创建线程 1,名称是 thread1,入口是 thread1_entry*/
tid1 = rt_thread_create("thread1",
thread1_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* 如果获得线程控制块,启动这个线程 */
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
init_key_btn();
while (1)
{
rt_thread_mdelay(500);
led_toggle(LED0);
// rt_kprintf("hello\n") ;
key_lib_buttons_process();
}
}
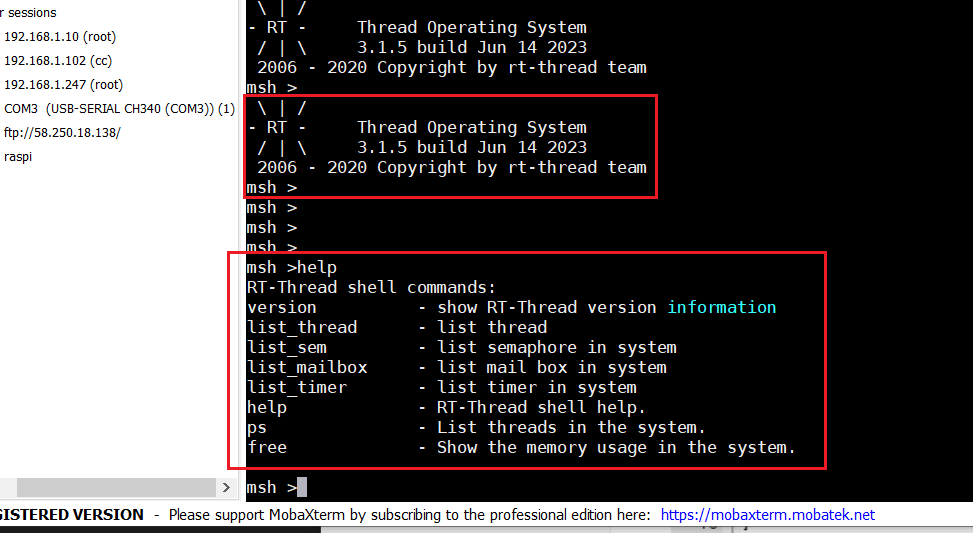
实例输出结果:
led0 500ms闪烁间隔 LED1 1000ms闪烁间隔
控制台输出RTT版本欢迎信息,可以shell交互