前言
osgearth_tracks示例,演示了所有图标沿着路径进行移动(路径是不可见的)。
执行效果
执行命令:osgearth_tracksd.exe earth_image\world.earth
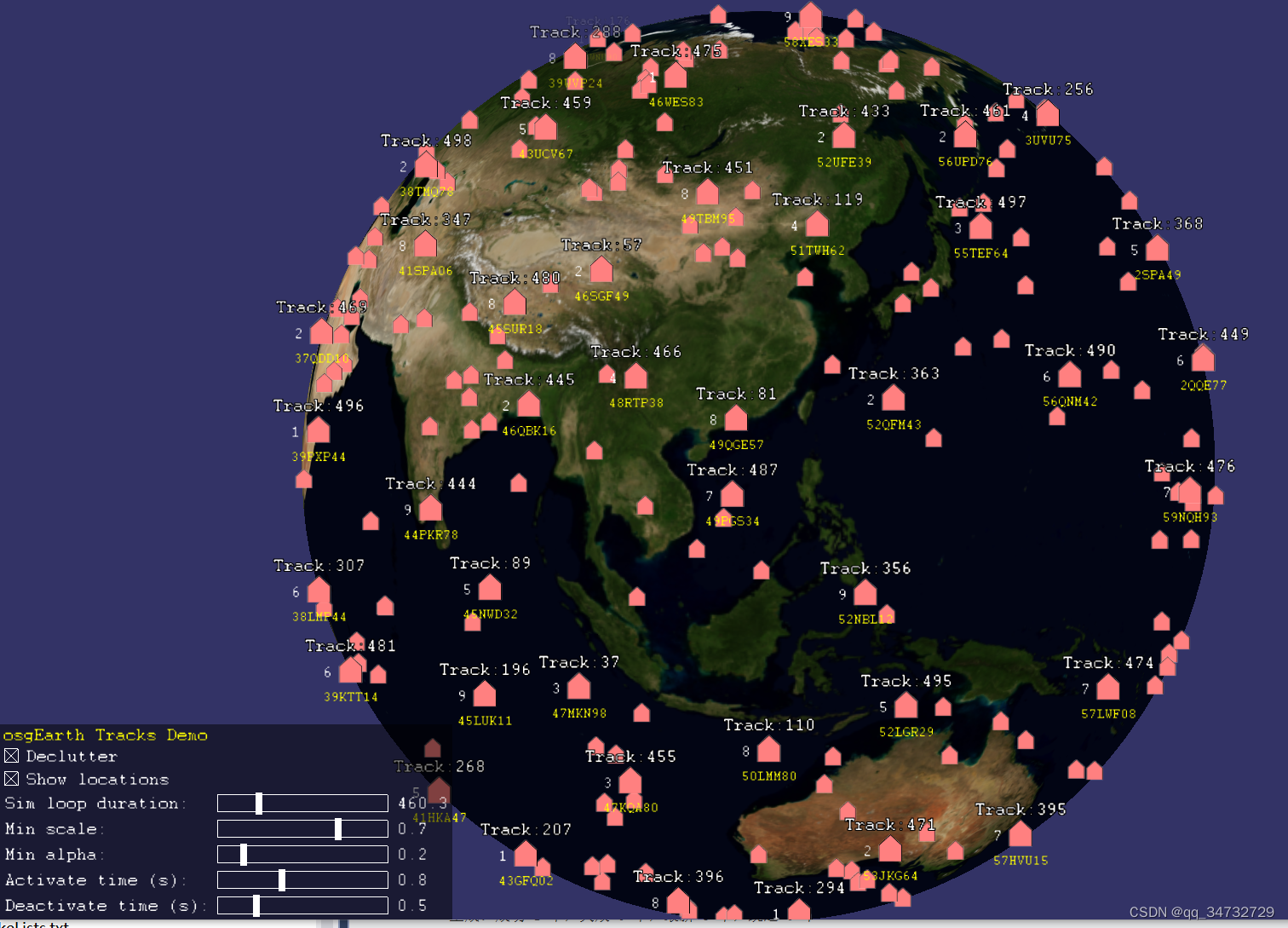
右下角的控制面板功能:
| Declutter | 是否开启 【清理器】 功能。 即当两个图标靠近时,其中一个会逐渐变小并消失; 当两个图标远离时,那个变小的图标会逐渐变大并出现。 |
| Show locations | 是否显示坐标信息,即图标下方黄色文本。 |
| Sim loop duration | 设置图标云顶一个周期的时间。 由于距离是一定的,周期越大,则运行速度越慢。 |
| Min scale | 图标变小时,最小的缩放值。 此值设置越小,图标变小的终极状态也会越小。 |
| Min alpha | 图标变小时,透明度的变化。 |
| Activate time(s) | 图标从最小状态,变化到最大状态的时间。 此值设置太小,则图标会一下子变大。 |
| Deactivate time(s) | 图标从正常变小,到终极最小状态的时间。 此值设置太小,则图标会一下子变小。 |
【注】最后两个值,有时候观察也不是太明显。
代码分析
此示例中,涉及到一些新的类和方法。下面简单进行分析。
1、控制面板功能的重要类
osgEarth::ScreenSpaceLayoutOptions 通过选项控制annotation清除的引擎类。比如上面表格中说的:scale、alpha、activate、deactivate等内容的控制。
osgEarth::ScreenSpaceLayout::setOptions ( ScreenSpaceLayout::getOptions() ) 控制activate、 deactivate、 enable(是否开启)等内容。
以上两个类是同时使用的。
2、坐标系
在此显示状态时,坐标系并非是我们熟知的经纬度,而是 osgEarth::Util::s_format(MGRSFormatter::PRECISION_10000M)
3、轨迹模拟器
通过osg的方式,实现的。struct TrackSim : public osg::Referenced,重写 update() 方法。struct TrackSimUpdate : public osg::Operation,重写 operator() 方法。
4、绘制标签和图标的方式
typedef std::map<std::string, TrackNodeField> TrackNodeFieldSchema schema;
schema[FIELD_NAME] = TrackNodeField(TextSymbol* nameSymbol, false);// 通过键值对构造
osgEarth::Annotation::TrackNode * track = new TrackNode(pos, image.get(), schema);
osgEarth::Annotation::TrackNodeField
5、控制面板的ui界面,本节仅有的新内容,是通过仅设置一个方法,就能为多个滑块添加事件。
6、
// attach the simulator to the viewer. 将仿真器和视景器关联起来
viewer.addUpdateOperation( new TrackSimUpdate(trackSims) );
viewer.setRunFrameScheme( viewer.CONTINUOUS );
完整代码
#include <osgEarth/MapNode>
#include <osgEarth/Random>
#include <osgEarth/StringUtils>
#include <osgEarth/ImageUtils>
#include <osgEarth/GeoMath>
#include <osgEarth/Units>
#include <osgEarth/StringUtils>
#include <osgEarth/ScreenSpaceLayout>
#include <osgEarthUtil/ExampleResources>
#include <osgEarthUtil/EarthManipulator>
#include <osgEarthUtil/MGRSFormatter>
#include <osgEarthUtil/Controls>
#include <osgEarthAnnotation/TrackNode>
#include <osgEarthSymbology/Color>
#include <osgViewer/Viewer>
#include <osgViewer/ViewerEventHandlers>
#include <osgGA/StateSetManipulator>
using namespace osgEarth;
using namespace osgEarth::Util;
using namespace osgEarth::Util::Controls;
using namespace osgEarth::Annotation;
using namespace osgEarth::Symbology;
#define LC "[osgearth_tracks] "
/**
* Demonstrates use of the TrackNode to display entity track symbols.
*/
// field names for the track labelsL
#define FIELD_NAME "name"
#define FIELD_POSITION "position"
#define FIELD_NUMBER "number"
// icon to use, and size in pixels
#define ICON_URL "m2525_air.png"
#define ICON_SIZE 40
// format coordinates as MGRS 坐标系格式MGRS
static MGRSFormatter s_format(MGRSFormatter::PRECISION_10000M);
// globals for this demo
bool g_showCoords = true;
optional<float> g_duration = 60.0;
unsigned g_numTracks = 500;
// 用于控制 清除引擎(图标和其他内容变小消失) 的选项。
ScreenSpaceLayoutOptions g_dcOptions;
/** Prints an error message */
int
usage( const std::string& message )
{
OE_WARN << LC << message << std::endl;
return -1;
}
/** A little track simulator that goes a simple great circle interpolation */
// 一个小小的轨迹模拟器,可以进行简单的大圆插值。
struct TrackSim : public osg::Referenced
{
TrackNode* _track;
GeoPoint _start, _end;
void update( double t )
{
osg::Vec3d pos;
GeoPoint geo = _start.interpolate(_end, t);
geo.alt() = 10000.0; // 高度默认
// update the position label.
_track->setPosition(geo);
if ( g_showCoords )// 此参数通过checkbox控制是否需要显示
{
_track->setFieldValue( FIELD_POSITION, s_format(geo) );// s_format 转化坐标格式
}
else
_track->setFieldValue( FIELD_POSITION, "" );
}
};
typedef std::list< osg::ref_ptr<TrackSim> > TrackSims;
/** Update operation that runs the simulators. */
// 运行的模拟器的更新操作
struct TrackSimUpdate : public osg::Operation
{
TrackSimUpdate(TrackSims& sims) : osg::Operation( "tasksim", true ), _sims(sims) { }
void operator()( osg::Object* obj ) {
osg::View* view = dynamic_cast<osg::View*>(obj);
double t = fmod(view->getFrameStamp()->getSimulationTime(), (double)g_duration.get()) / (double)g_duration.get();
for( TrackSims::iterator i = _sims.begin(); i != _sims.end(); ++i )
i->get()->update( t );// 更新每一个TrackSim
}
TrackSims& _sims;
};
/**
* Creates a field schema that we'll later use as a labeling template for
* TrackNode instances.
*/
// 创建一个字段模式,稍后将用作TrackNode实例的标签模板。
// typedef std::map<std::string, TrackNodeField> TrackNodeFieldSchema;
// TrackNodeField:定义与TrackNode关联的标签字段。TrackNode可以有零个或多个“字段”,每个字段都是与节点图标一起呈现的文本标签。
void
createFieldSchema( TrackNodeFieldSchema& schema )
{
const float R = 2.0f;
// 三个字段,分别显示名称、坐标、当前编号,分别位于图标的上、下、左侧。
// 关于位置的设定,->pixelOffset()与->alignment() 的属性设置,需要放在一起看,才能更明白。
// draw the track name above the icon:
TextSymbol* nameSymbol = new TextSymbol();
nameSymbol->pixelOffset()->set( 0, R+ICON_SIZE/2 );// 文本偏移
nameSymbol->alignment() = TextSymbol::ALIGN_CENTER_BOTTOM;// 文本位置
nameSymbol->halo()->color() = Color::Black;
nameSymbol->size() = nameSymbol->size()->eval() + 2.0f;
schema[FIELD_NAME] = TrackNodeField(nameSymbol, false); // false => static label (won't change after set)
// draw the track coordinates below the icon:
TextSymbol* posSymbol = new TextSymbol();
posSymbol->pixelOffset()->set( 0, -R-ICON_SIZE/2 );
posSymbol->alignment() = TextSymbol::ALIGN_CENTER_TOP;
posSymbol->fill()->color() = Color::Yellow;
posSymbol->size() = posSymbol->size()->eval() - 2.0f;
schema[FIELD_POSITION] = TrackNodeField(posSymbol, true); // true => may change at runtime,位置改变
// draw some other field to the left:
TextSymbol* numberSymbol = new TextSymbol();
numberSymbol->pixelOffset()->set( -R-ICON_SIZE/2, 0 );
numberSymbol->alignment() = TextSymbol::ALIGN_RIGHT_CENTER;
schema[FIELD_NUMBER] = TrackNodeField(numberSymbol, false);
}
/** Builds a bunch of tracks. */
// 创建一堆轨道
void
createTrackNodes(const SpatialReference* mapSRS, osg::Group* parent, const TrackNodeFieldSchema& schema, TrackSims& sims )
{
// load an icon to use:
osg::ref_ptr<osg::Image> srcImage = osgDB::readRefImageFile( ICON_URL );
osg::ref_ptr<osg::Image> image;
// 输入文件,格式化后,变为输出文件image
ImageUtils::resizeImage( srcImage.get(), ICON_SIZE, ICON_SIZE, image );
// make some tracks, choosing a random simulation for each.
Random prng;// 随机数
// 获取地理坐标系
const SpatialReference* geoSRS = mapSRS->getGeographicSRS();
// g_numTracks = 500
for( unsigned i=0; i<g_numTracks; ++i )
{
// prng.next():a double in the range [0..1]
double lon0 = -180.0 + prng.next() * 360.0;
double lat0 = -80.0 + prng.next() * 160.0;
GeoPoint pos(geoSRS, lon0, lat0);
TrackNode* track = new TrackNode(pos, image.get(), schema);
track->setFieldValue( FIELD_NAME, Stringify() << "Track:" << i );
track->setFieldValue( FIELD_POSITION, Stringify() << s_format(pos) );// 转化坐标格式
track->setFieldValue( FIELD_NUMBER, Stringify() << (1 + prng.next(9)) );
// add a priority
track->setPriority( float(i) );
parent->addChild( track );
// add a simulator for this guy
double lon1 = -180.0 + prng.next() * 360.0;
double lat1 = -80.0 + prng.next() * 160.0;
TrackSim* sim = new TrackSim();// 创建轨道模拟器
sim->_track = track;
sim->_start.set(mapSRS, lon0, lat0, 0.0, ALTMODE_ABSOLUTE);
sim->_end.set(mapSRS, lon1, lat1, 0.0, ALTMODE_ABSOLUTE);
sims.push_back( sim );
}
}
/** creates some UI controls for adjusting the decluttering parameters. */
// 创建ui面板
Container*
createControls( osgViewer::View* view )
{
//ControlCanvas* canvas = ControlCanvas::getOrCreate(view);
// title bar 垂直box
VBox* vbox = new VBox(Control::ALIGN_NONE, Control::ALIGN_BOTTOM, 2, 1 );
vbox->setBackColor( Color(Color::Black, 0.5) );
// 添加一个label控件
vbox->addControl( new LabelControl("osgEarth Tracks Demo", Color::Yellow) );
// checkbox that toggles decluttering of tracks
// 通过复选框,切换 是否开启 清理功能(也就是当两个图标移动靠近时,会有一个逐渐变小以至于隐藏,避免图标覆盖遮挡)
struct ToggleDecluttering : public ControlEventHandler {
void onValueChanged( Control* c, bool on ) {
ScreenSpaceLayout::setDeclutteringEnabled( on );
}
};
HBox* dcToggle = vbox->addControl( new HBox() );
dcToggle->addControl( new CheckBoxControl(true, new ToggleDecluttering()) );
dcToggle->addControl( new LabelControl("Declutter") );
// checkbox that toggles the coordinate display
// 切换是否显示图标下方的坐标信息
struct ToggleCoords : public ControlEventHandler {
void onValueChanged( Control* c, bool on ) {
g_showCoords = on;// 是否显示坐标系
}
};
HBox* coordsToggle = vbox->addControl( new HBox() );
coordsToggle->addControl( new CheckBoxControl(true, new ToggleCoords()) );
coordsToggle->addControl( new LabelControl("Show locations") );
// grid for the slider controls so they look nice
// 添加网格,然后在网格中绘制滑块,看起来更美观
Grid* grid = vbox->addControl( new Grid() );
grid->setHorizFill( true );
grid->setChildHorizAlign( Control::ALIGN_LEFT );
grid->setChildSpacing( 6 );// 子控件的间距
unsigned r=0;
// event handler for changing decluttering options
struct ChangeFloatOption : public ControlEventHandler {
optional<float>& _param;
LabelControl* _label;
ChangeFloatOption( optional<float>& param, LabelControl* label ) : _param(param), _label(label) { }
void onValueChanged( Control* c, float value ) {
_param = value;
_label->setText( Stringify() << std::fixed << std::setprecision(1) << value );// 修改滑块值,此值会显示在label上
ScreenSpaceLayout::setOptions( g_dcOptions );// 通过 g_dcOptions 参数设置引擎
}
};
// 设置循环一圈的时间,时间越小,速度越快
grid->setControl( 0, r, new LabelControl("Sim loop duration:") );
LabelControl* speedLabel = grid->setControl( 2, r, new LabelControl(Stringify() << std::fixed << std::setprecision(1) << *g_duration) );
HSliderControl* speedSlider = grid->setControl( 1, r, new HSliderControl(
600.0, 30.0, *g_duration, new ChangeFloatOption(g_duration, speedLabel) ) );// 控制 g_duration
speedSlider->setHorizFill( true, 200 );
// 控制最小值,即两个标签靠近时,有一个标签逐渐变小,以至于变到最小的值
grid->setControl( 0, ++r, new LabelControl("Min scale:") );
LabelControl* minAnimationScaleLabel = grid->setControl( 2, r, new LabelControl(Stringify() << std::fixed << std::setprecision(1) << *g_dcOptions.minAnimationScale()) );
grid->setControl( 1, r, new HSliderControl(
0.0, 1.0, *g_dcOptions.minAnimationScale(), new ChangeFloatOption(g_dcOptions.minAnimationScale(), minAnimationScaleLabel) ) );
// 更改透明度
grid->setControl( 0, ++r, new LabelControl("Min alpha:") );
LabelControl* alphaLabel = grid->setControl( 2, r, new LabelControl(Stringify() << std::fixed << std::setprecision(1) << *g_dcOptions.minAnimationAlpha()) );
grid->setControl( 1, r, new HSliderControl(
0.0, 1.0, *g_dcOptions.minAnimationAlpha(), new ChangeFloatOption(g_dcOptions.minAnimationAlpha(), alphaLabel) ) );
// 激活时间
grid->setControl( 0, ++r, new LabelControl("Activate time (s):") );
LabelControl* actLabel = grid->setControl( 2, r, new LabelControl(Stringify() << std::fixed << std::setprecision(1) << *g_dcOptions.inAnimationTime()) );
grid->setControl( 1, r, new HSliderControl(
0.0, 2.0, *g_dcOptions.inAnimationTime(), new ChangeFloatOption(g_dcOptions.inAnimationTime(), actLabel) ) );
// 停止时间
grid->setControl( 0, ++r, new LabelControl("Deactivate time (s):") );
LabelControl* deactLabel = grid->setControl( 2, r, new LabelControl(Stringify() << std::fixed << std::setprecision(1) << *g_dcOptions.outAnimationTime()) );
grid->setControl( 1, r, new HSliderControl(
0.0, 2.0, *g_dcOptions.outAnimationTime(), new ChangeFloatOption(g_dcOptions.outAnimationTime(), deactLabel) ) );
return vbox;
}
/**
* Main application.
* Creates some simulated track data and runs the simulation.
*/
int
main(int argc, char** argv)
{
osg::ArgumentParser arguments(&argc,argv);
// initialize a viewer.
osgViewer::Viewer viewer( arguments );
viewer.setCameraManipulator( new EarthManipulator );
// load a map from an earth file.读取earth文件,并且创建界面控制面板
osg::Node* earth = MapNodeHelper().load(arguments, &viewer, createControls(&viewer));
MapNode* mapNode = MapNode::findMapNode(earth);
if ( !mapNode )
return usage("Missing required .earth file" );
// count on the cmd line? 从控制台输入个数,默认500个
arguments.read("--count", g_numTracks);
viewer.setSceneData( earth );
// build a track field schema.
// 创建一个map列表 ,typedef std::map<std::string, osgEarth::Annotation::TrackNodeField> TrackNodeFieldSchema;
TrackNodeFieldSchema schema;
// 初始化 schema 对象
createFieldSchema( schema );
// create some track nodes.创建一些跟踪节点
TrackSims trackSims;
osg::Group* tracks = new osg::Group();
createTrackNodes( mapNode->getMapSRS(), tracks, schema, trackSims );
mapNode->addChild( tracks );
// Set up the automatic decluttering. setEnabled() activates decluttering for
// all drawables under that state set. We are also activating priority-based
// sorting, which looks at the AnnotationData::priority field for each drawable.
// (By default, objects are sorted by disatnce-to-camera.) Finally, we customize
// a couple of the decluttering options to get the animation effects we want.
g_dcOptions = ScreenSpaceLayout::getOptions();
g_dcOptions.inAnimationTime() = 1.0f;
g_dcOptions.outAnimationTime() = 1.0f;
g_dcOptions.sortByPriority() = true;
ScreenSpaceLayout::setOptions( g_dcOptions );
// attach the simulator to the viewer. 将仿真器和视景器关联起来
viewer.addUpdateOperation( new TrackSimUpdate(trackSims) );
viewer.setRunFrameScheme( viewer.CONTINUOUS );
viewer.getCamera()->setSmallFeatureCullingPixelSize(-1.0f);
viewer.run();
}


![[附源码]JAVA毕业设计论文管理系统(系统+LW)](https://img-blog.csdnimg.cn/250c6e6dd5c04fc5be22d23c01824097.png)