这里写目录标题
- 原理
- 代码实现
原理
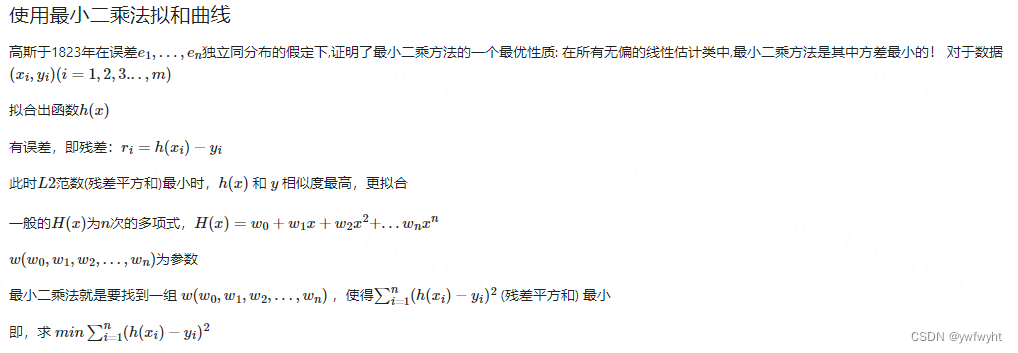
最小二乘法适用于对处理的一堆数据,不必精确的经过每一点,而是根据图像到每个数据点的距离和最小确定函数。需要注意的是,最小二乘是对全局进行拟合优化,对噪声比较敏感,所以如果有噪声比较大的观测值会影响拟合结果,此时建议用RANSAC算法拟合。
最小二乘法逼近的最简单的例子是根据一组观测值对(x1,y1),(x2,y2)…(xn,yn)来拟合一条直线。
对于
y
=
a
0
+
a
1
x
+
e
y=a_{0} + a_{1}x + e
y=a0+a1x+e,在一组观测数据中拟合最好的模型,即使得残差
e
e
e的平方和最小。分别对
a
0
、
a
1
a_{0}、a_{1}
a0、a1求偏导,可得:
∑
i
=
1
n
a
0
+
∑
i
=
1
n
x
i
a
1
=
∑
i
=
1
n
y
i
∑
i
=
1
n
x
i
a
0
+
∑
i
=
1
n
x
i
2
a
1
=
∑
i
=
1
n
x
i
y
i
\begin {matrix} \displaystyle\sum_{i=1}^na_{0} + \displaystyle\sum_{i=1}^nx_{i}a_{1} = \displaystyle\sum_{i=1}^ny_{i} \\ \displaystyle\sum_{i=1}^nx_{i}a_{0} + \displaystyle\sum_{i=1}^nx_{i}^2a_{1} = \displaystyle\sum_{i=1}^nx_{i}y_{i} \end {matrix}
i=1∑na0+i=1∑nxia1=i=1∑nyii=1∑nxia0+i=1∑nxi2a1=i=1∑nxiyi
则:
a
1
=
n
∑
i
=
1
n
x
i
y
i
−
∑
i
=
1
n
x
i
∑
i
=
1
n
y
i
n
∑
i
=
1
n
x
i
2
−
(
∑
i
=
1
n
x
i
)
2
a_{1} = \cfrac {n\sum_{i=1}^nx_{i}y_{i} - \sum_{i=1}^n x_{i}\sum_{i=1}^n y_{i}}{n \sum_{i=1}^n x_{i}^2 - (\sum_{i=1}^n x_{i})^2}\\
a1=n∑i=1nxi2−(∑i=1nxi)2n∑i=1nxiyi−∑i=1nxi∑i=1nyi
a
0
=
y
ˉ
−
a
1
x
ˉ
a_{0} = \text{\={y}} - a_{1}\text{\={x}}
a0=yˉ−a1xˉ
对n次多项式同样适用。
代码实现
def leastsq_fit(points:np.ndarray):
points_size = len(points)
points_sum = np.sum(points, axis=0)
sum_xy = np.sum(points[:, 0] * points[:, 1], axis=0)
sum_x = points_sum[0]
sum_y = points_sum[1]
sum_sqare_x = np.sum(points ** 2, axis=0)[0]
average_x = sum_x / points_size
average_y = sum_y / points_size
k = (points_size*sum_xy - sum_x*sum_y)/(points_size*sum_sqare_x - sum_x*sum_x)
b = average_y - average_x*k
best_model = np.zeros((2, 1), dtype=np.float32)
best_model[0, 0] = b
best_model[1, 0] = k
return best_model
矩阵形式参考我另外的博客链接1,链接2
def leastsq_mutifunc(x, y, m):
"""
多项式最小二乘法实现, 矩阵形式
:param x:输入
:param y:目标输出
:param m:多项式阶数
:return:多项式系数
"""
x = np.array(x)
y = np.array(y)
assert m <= x.shape[0], f"the number of m({m}) need less than x's size({x.shape[0]})"
assert x.shape[0] == y.shape[0], f"the size of x({x.shape[0]}) must equal to y's size({y.shape[0]}"
x_mat = np.zeros((x.shape[0], m+1))
for i in range(x.shape[0]):
x_mat_h = np.zeros((1, m+1))
for j in range(m+1):
x_mat_h[0][j] = x[i] ** (m-j)
x_mat[i] = x_mat_h
theta = np.dot(np.dot(np.linalg.inv(np.dot(x_mat.T, x_mat)), x_mat.T), y.T)
return theta
参考链接1
参考链接2




![[ 红队知识库 ] 常见防火墙(WAF)拦截页面](https://img-blog.csdnimg.cn/9a895acff51c4beaa1d36d414afe7470.png)