1. 功能说明
本文示例将实现R018a支撑臂爬楼履带车爬楼梯的功能。
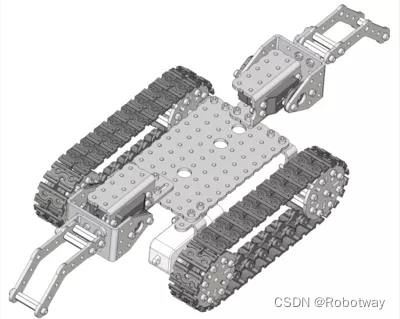
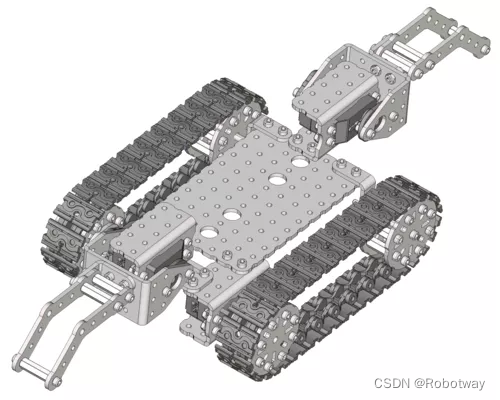
2. 结构说明
支撑臂爬楼履带车主要是由 小型平行履带底盘 和2个 舵机关节模组 组成。

3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 电池 | 7.4V锂电池 |
电路连接:
舵机分别连接在Bigfish扩展板的D3、D4;
电机分别连在Bigfish扩展板的(9,10)、(5,6)接口。

4. 功能实现
编程环境:Arduino 1.8.19
实现思路:实现支撑臂爬楼履带车爬楼梯的功能。
将参考例程(sketch_apr27a.ino)下载到主控板,实验效果可参考官网演示视频。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-05-12 https://www.robotway.com/
------------------------------*/
#include <Servo.h>
Servo servo_pin_4;
Servo servo_pin_3;
int i = 0;
int j = 0;
void setup()
{
Serial.begin(9600);
pinMode( 10, OUTPUT);
pinMode( 6, OUTPUT);
pinMode( 5, OUTPUT);
pinMode( 9, OUTPUT);
servo_pin_4.attach(4);
servo_pin_3.attach(3);
servo_pin_4.write(0);
servo_pin_3.write(180);
}
void loop()
{
forward();
for(i = 0; i <= 180; i+=2)
{
servo_pin_4.write(i);
servo_pin_3.write(180-i);
delay(5);
}
for(i = 180; i >= 0; i-=2)
{
servo_pin_4.write(i);
servo_pin_3.write(180-i);
delay(5);
}
}
void forward()
{
digitalWrite(5,HIGH);
digitalWrite(6,LOW);
digitalWrite(9,HIGH);
digitalWrite(10,LOW);
}5. 扩展样机
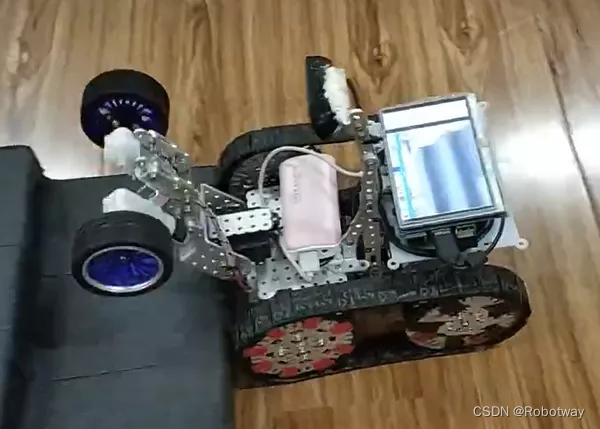
本样机可以有一些扩展,如将样机底盘上的2个直流电机替换成舵机,如下图所示:
或者对关节模组进行改造,增加更强大的功能装置,如下图所示(该作品为“智能管道检测机器人”。开发者:白东旭、毛砚锋、刘颖、刘一博、杨志文。指导老师:李公法、孙瑛。武汉科技大学,2020年):
程序源代码及样机3D文件资料内容详见 支撑臂爬楼履带车-概述