本期为TechBeat人工智能社区第503期线上Talk!
北京时间6月07日(周三)20:00,CMU Robotics Institute 在读博士生—胡亚飞的Talk将准时在TechBeat人工智能社区开播!
他与大家分享的主题是: “基于离线强化学习的机器人自主探索 ”,届时将介绍和探讨OPERE及其在复杂场景中真机测试的效果。
Talk·信息
▼
主题:基于离线强化学习的机器人自主探索
嘉宾:CMU Robotics Institute
在读博士生 胡亚飞
时间:北京时间 6月07日 (周三) 20:00
地点:TechBeat人工智能社区
http://www.techbeat.net/
长按识别二维码,一键预约TALK!

Talk·介绍
▼
最近几年随着离线强化学习算法的兴起,相关算法也被应用在机器人控制,规划以及决策等领域。离线强化学习由于其安全性,数据可复用性,以及预训练的便捷性,使得其在机器人领域拥有巨大前景。随着基础模型在计算机视觉和自然语言领域的成功,离线强化学习也成为机器人控制基础模型的潜在解决方案。
Talk大纲
1.介绍Off-Policy Evaluation for Robot Exploration (OPERE)
2.梳理离线强化学习在机器人领域的最新研究进展
3.OPERE使用离线预训练与在线自适应算法来学习状态价值函数
4.复杂的场景中对OPERE效果
Talk·预习资料
▼

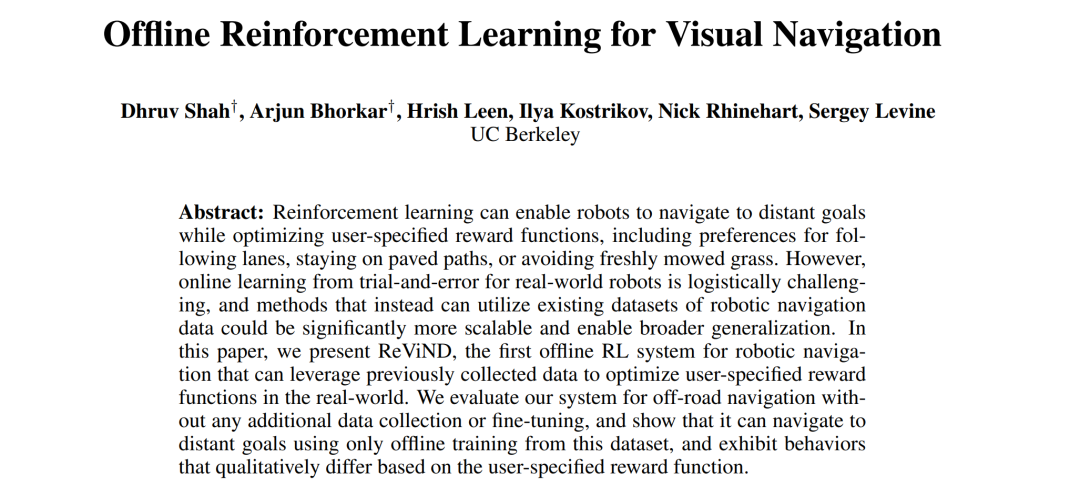
paper链接:
https://arxiv.org/pdf/2204.03140.pdf

paper链接:
https://arxiv.org/pdf/2005.01643.pdf
paper链接:
https://arxiv.org/pdf/2212.08244.pdf
Talk·提问交流
▼
在Talk界面下的【交流区】参与互动!留下你的打call🤟和问题🙋,和更多小伙伴们共同讨论,被讲者直接翻牌解答!
你的每一次贡献,我们都会给予你相应的i豆积分,还会有惊喜奖励哦!
Talk·嘉宾介绍
▼

胡亚飞
CMU Robotics Institute 在读博士生
CMU Robotics Institute和ECE系在读博士。主要研究方向为机器人视觉感知与推理决策,涉及深度强化学习,运动规划,机器人自主探索,视觉SLAM等问题。在计算机视觉和机器人领域顶会顶刊发表数篇论文,并担任审稿人。
-The End-