写在前面
- 工作中遇到,简单整理
- 博文内容涉及基于
OpenCV 和 Dlib头部姿态评估的简单Demo - 理解不足小伙伴帮忙指正
庐山烟雨浙江潮,未到千般恨不消。到得还来别无事,庐山烟雨浙江潮。 ----《庐山烟雨浙江潮》苏轼
https://github.com/LIRUILONGS/Head-posture-detection-dlib-opencv-.git
实验项目以上传,只需 git 克隆,安装需要的 pytohn 包,就可以开始使用了,但是需要说明的是 Dlib 的基于 HOG特征和SVM分类器的人脸检测器很一般,很多脸都检测不到,实际情况中可以考虑使用深度学习模型来做关键点检测,然后评估姿态。可以查看文章末尾大佬的开源项目
实现效果
| Demo |
|---|
| 原图 |
 |
 |
| 特征点标记后 |
 |
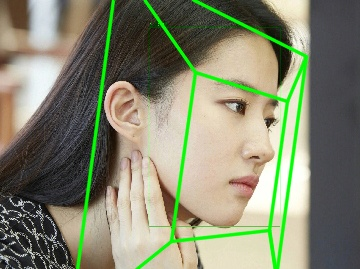
| 姿态标记 |
 |
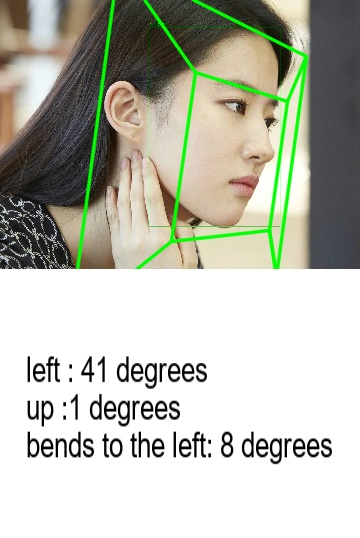
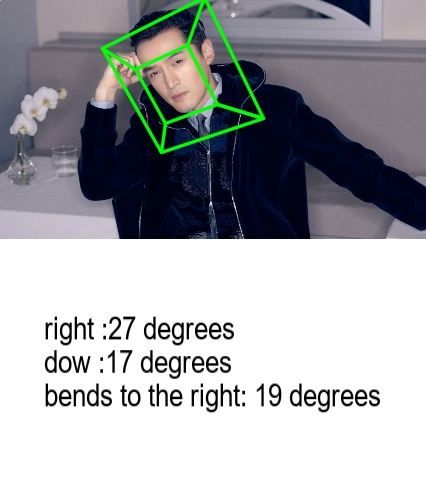
| 姿态对应的Yaw,Pitch,Roll 度数 |
 |
 |
步骤
三个主要步骤
人脸检测
人脸检测:引入人脸检测器 dlib.get_frontal_face_detector() 以检测包含人脸的图片,多个人脸会选择面积最大的人脸。
dlib.get_frontal_face_detector() 是 dlib 库中的一个函数,用于获取一个基于HOG特征和SVM分类器的人脸检测器。该函数返回一个可以用于检测图像中人脸的对象。
具体来说,HOG(Histogram of Oriented Gradients,梯度方向直方图)是一种常用于图像识别中的特征描述子,SVM(Support Vector Machine,支持向量机)是一种常用的分类器。将HOG特征与SVM分类器结合起来,可以得到一个有效的人脸检测器。
在使用 dlib.get_frontal_face_detector()函数时,只需将待检测的图像作为参数传入,即可得到一个用于检测人脸的对象。一个Demo
import dlib
import cv2
# 读取图像
img = cv2.imread('image.jpg')
# 获取人脸检测器
detector = dlib.get_frontal_face_detector()
# 在图像中检测人脸
faces = detector(img)
# 输出检测到的人脸数
print("检测到的人脸数为:", len(faces))
面部特征点检测
面部特征点检测,利用预训练模型 shape_predictor_68_face_landmarks.dat 以人脸图像为输入,输出68个人脸特征点。
shape_predictor_68_face_landmarks.dat 是基于 dlib 库中的人脸特征点检测模型,该模型使用了基于 HOG 特征和 SVM 分类器的人脸检测器来检测图像中的人脸,并使用回归算法来预测人脸的 68 个关键点位置。这些关键点包括眼睛、鼻子、嘴巴等部位,可以用于进行人脸识别、表情识别、姿态估计等应用。
这个模型文件可以在dlib的官方网站上下载。在使用它之前,需要安装dlib库并将模型文件加载到程序中。
predictor = dlib.shape_predictor(r".\shape_predictor_68_face_landmarks.dat")
姿势估计
姿势估计。在获得 68 个面部特征点后,选择部分特征点,通过 PnP算法计算姿势 Yaw、Pitch、Roll 度数
(success, rotation_vector, translation_vector) = cv2.solvePnP(model_points, image_points, camera_matrix,
dist_coeffs, flags=cv2.SOLVEPNP_ITERATIVE)
Yaw、Pitch、Roll 是用于描述物体或相机在三维空间中的旋转角度的术语,常用于姿态估计和姿态控制中。
Yaw(左右):绕垂直于物体或相机的轴旋转的角度,也称为偏航角。通常以 z 轴为轴进行旋转,正值表示逆时针旋转,负值表示顺时针旋转。Pitch(上下):绕物体或相机的横轴旋转的角度,也称为俯仰角。通常以 x 轴为轴进行旋转,正值表示向上旋转,负值表示向下旋转。Roll(弯曲):绕物体或相机的纵轴旋转的角度,也称为翻滚角。通常以 y 轴为轴进行旋转,正值表示向右旋转,负值表示向左旋转。
这三个角度通常以欧拉角的形式表示,可以用于描述物体或相机的姿态信息。在计算机视觉中,常用于人脸识别、动作捕捉、机器人控制等应用场景。
完整 Demo 代码
#!/usr/bin/env python
# -*- encoding: utf-8 -*-
"""
@File : face_ypr_demo.py
@Time : 2023/06/05 21:32:45
@Author : Li Ruilong
@Version : 1.0
@Contact : liruilonger@gmail.com
@Desc : 根据68个人脸关键点,获取人头部姿态评估
"""
# here put the import lib
import cv2
import numpy as np
import dlib
import math
import uuid
# 头部姿态检测(dlib+opencv)
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(r".\shape_predictor_68_face_landmarks.dat")
POINTS_NUM_LANDMARK = 68
# shape_predictor_68_face_landmarks.dat 是一个预训练的人脸关键点检测模型,可以用于识别人脸的68个关键点,如眼睛、鼻子、嘴巴等。这个模型可以被用于人脸识别、人脸表情分析、面部姿势估计等领域。
# 它是由dlib库提供的,可以在Python中使用。如果你想使用它,可以在dlib的官方网站上下载。
# 获取最大的人脸
def _largest_face(dets):
"""
@Time : 2023/06/05 21:30:37
@Author : liruilonger@gmail.com
@Version : 1.0
@Desc : 从一个由 dlib 库检测到的人脸框列表中,找到最大的人脸框,并返回该框在列表中的索
如果只有一个人脸,直接返回
Args:
dets: 一个由 `dlib.rectangle` 类型的对象组成的列表,每个对象表示一个人脸框
Returns:
人脸索引
"""
# 如果列表长度为1,则直接返回
if len(dets) == 1:
return 0
# 计算每个人脸框的面积
face_areas = [(det.right() - det.left()) * (det.bottom() - det.top()) for det in dets]
import heapq
# 找到面积最大的人脸框的索引
largest_area = face_areas[0]
largest_index = 0
for index in range(1, len(dets)):
if face_areas[index] > largest_area:
largest_index = index
largest_area = face_areas[index]
# 打印最大人脸框的索引和总人脸数
print("largest_face index is {} in {} faces".format(largest_index, len(dets)))
return largest_index
def get_image_points_from_landmark_shape(landmark_shape):
"""
@Time : 2023/06/05 22:30:02
@Author : liruilonger@gmail.com
@Version : 1.0
@Desc : 从dlib的检测结果抽取姿态估计需要的点坐标
Args:
landmark_shape: 所有的位置点
Returns:
void
"""
if landmark_shape.num_parts != POINTS_NUM_LANDMARK:
print("ERROR:landmark_shape.num_parts-{}".format(landmark_shape.num_parts))
return -1, None
# 2D image points. If you change the image, you need to change vector
image_points = np.array([
(landmark_shape.part(17).x, landmark_shape.part(17).y), # 17 left brow left corner
(landmark_shape.part(21).x, landmark_shape.part(21).y), # 21 left brow right corner
(landmark_shape.part(22).x, landmark_shape.part(22).y), # 22 right brow left corner
(landmark_shape.part(26).x, landmark_shape.part(26).y), # 26 right brow right corner
(landmark_shape.part(36).x, landmark_shape.part(36).y), # 36 left eye left corner
(landmark_shape.part(39).x, landmark_shape.part(39).y), # 39 left eye right corner
(landmark_shape.part(42).x, landmark_shape.part(42).y), # 42 right eye left corner
(landmark_shape.part(45).x, landmark_shape.part(45).y), # 45 right eye right corner
(landmark_shape.part(31).x, landmark_shape.part(31).y), # 31 nose left corner
(landmark_shape.part(35).x, landmark_shape.part(35).y), # 35 nose right corner
(landmark_shape.part(48).x, landmark_shape.part(48).y), # 48 mouth left corner
(landmark_shape.part(54).x, landmark_shape.part(54).y), # 54 mouth right corner
(landmark_shape.part(57).x, landmark_shape.part(57).y), # 57 mouth central bottom corner
(landmark_shape.part(8).x, landmark_shape.part(8).y), # 8 chin corner
], dtype="double")
return 0, image_points
def get_image_points(img):
"""
@Time : 2023/06/05 22:30:43
@Author : liruilonger@gmail.com
@Version : 1.0
@Desc : 用dlib检测关键点,返回姿态估计需要的几个点坐标
Args:
Returns:
void
"""
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 图片调整为灰色
dets = detector(img, 0)
if 0 == len(dets):
print("ERROR: found no face")
return -1, None
largest_index = _largest_face(dets)
face_rectangle = dets[largest_index]
landmark_shape = predictor(img, face_rectangle)
draw = im.copy()
cv2.circle(draw, (landmark_shape.part(0).x, landmark_shape.part(0).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(1).x, landmark_shape.part(1).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(2).x, landmark_shape.part(2).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(3).x, landmark_shape.part(3).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(4).x, landmark_shape.part(4).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(5).x, landmark_shape.part(5).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(6).x, landmark_shape.part(6).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(7).x, landmark_shape.part(7).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(8).x, landmark_shape.part(8).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(9).x, landmark_shape.part(9).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(10).x, landmark_shape.part(10).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(11).x, landmark_shape.part(11).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(12).x, landmark_shape.part(12).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(13).x, landmark_shape.part(13).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(14).x, landmark_shape.part(14).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(15).x, landmark_shape.part(15).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(16).x, landmark_shape.part(16).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(17).x, landmark_shape.part(17).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(18).x, landmark_shape.part(18).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(19).x, landmark_shape.part(19).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(20).x, landmark_shape.part(20).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(21).x, landmark_shape.part(21).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(22).x, landmark_shape.part(22).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(23).x, landmark_shape.part(23).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(24).x, landmark_shape.part(24).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(25).x, landmark_shape.part(25).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(26).x, landmark_shape.part(26).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(27).x, landmark_shape.part(27).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(28).x, landmark_shape.part(28).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(29).x, landmark_shape.part(29).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(30).x, landmark_shape.part(30).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(31).x, landmark_shape.part(31).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(32).x, landmark_shape.part(32).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(33).x, landmark_shape.part(33).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(34).x, landmark_shape.part(34).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(35).x, landmark_shape.part(35).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(36).x, landmark_shape.part(36).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(37).x, landmark_shape.part(37).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(38).x, landmark_shape.part(38).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(39).x, landmark_shape.part(39).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(40).x, landmark_shape.part(40).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(41).x, landmark_shape.part(41).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(42).x, landmark_shape.part(42).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(43).x, landmark_shape.part(43).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(44).x, landmark_shape.part(44).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(45).x, landmark_shape.part(45).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(46).x, landmark_shape.part(46).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(47).x, landmark_shape.part(47).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(48).x, landmark_shape.part(48).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(49).x, landmark_shape.part(49).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(50).x, landmark_shape.part(50).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(51).x, landmark_shape.part(51).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(52).x, landmark_shape.part(52).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(53).x, landmark_shape.part(53).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(54).x, landmark_shape.part(54).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(55).x, landmark_shape.part(55).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(56).x, landmark_shape.part(56).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(57).x, landmark_shape.part(57).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(58).x, landmark_shape.part(58).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(59).x, landmark_shape.part(59).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(60).x, landmark_shape.part(60).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(61).x, landmark_shape.part(61).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(62).x, landmark_shape.part(62).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(63).x, landmark_shape.part(63).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(64).x, landmark_shape.part(64).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(65).x, landmark_shape.part(65).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(66).x, landmark_shape.part(66).y), 2, (0, 255, 0), -1)
cv2.circle(draw, (landmark_shape.part(67).x, landmark_shape.part(67).y), 2, (0, 255, 0), -1)
# 部分关键点特殊标记
cv2.circle(draw, (landmark_shape.part(17).x, landmark_shape.part(17).y), 2, (0, 165, 255),
-1) # 17 left brow left corner
cv2.circle(draw, (landmark_shape.part(21).x, landmark_shape.part(21).y), 2, (0, 165, 255),
-1) # 21 left brow right corner
cv2.circle(draw, (landmark_shape.part(22).x, landmark_shape.part(22).y), 2, (0, 165, 255),
-1) # 22 right brow left corner
cv2.circle(draw, (landmark_shape.part(26).x, landmark_shape.part(26).y), 2, (0, 165, 255),
-1) # 26 right brow right corner
cv2.circle(draw, (landmark_shape.part(36).x, landmark_shape.part(36).y), 2, (0, 165, 255),
-1) # 36 left eye left corner
cv2.circle(draw, (landmark_shape.part(39).x, landmark_shape.part(39).y), 2, (0, 165, 255),
-1) # 39 left eye right corner
cv2.circle(draw, (landmark_shape.part(42).x, landmark_shape.part(42).y), 2, (0, 165, 255),
-1) # 42 right eye left corner
cv2.circle(draw, (landmark_shape.part(45).x, landmark_shape.part(45).y), 2, (0, 165, 255),
-1) # 45 right eye right corner
cv2.circle(draw, (landmark_shape.part(31).x, landmark_shape.part(31).y), 2, (0, 165, 255),
-1) # 31 nose left corner
cv2.circle(draw, (landmark_shape.part(35).x, landmark_shape.part(35).y), 2, (0, 165, 255),
-1) # 35 nose right corner
cv2.circle(draw, (landmark_shape.part(48).x, landmark_shape.part(48).y), 2, (0, 165, 255),
-1) # 48 mouth left corner
cv2.circle(draw, (landmark_shape.part(54).x, landmark_shape.part(54).y), 2, (0, 165, 255),
-1) # 54 mouth right corner
cv2.circle(draw, (landmark_shape.part(57).x, landmark_shape.part(57).y), 2, (0, 165, 255),
-1) # 57 mouth central bottom corner
cv2.circle(draw, (landmark_shape.part(8).x, landmark_shape.part(8).y), 2, (0, 165, 255), -1)
# 保存关键点标记后的图片
cv2.imwrite('new_' + "KeyPointDetection.jpg", draw)
return get_image_points_from_landmark_shape(landmark_shape)
def get_pose_estimation(img_size, image_points):
"""
@Time : 2023/06/05 22:31:31
@Author : liruilonger@gmail.com
@Version : 1.0
@Desc : 获取旋转向量和平移向量
Args:
Returns:
void
"""
# 3D model points.
model_points = np.array([
(6.825897, 6.760612, 4.402142), # 33 left brow left corner
(1.330353, 7.122144, 6.903745), # 29 left brow right corner
(-1.330353, 7.122144, 6.903745), # 34 right brow left corner
(-6.825897, 6.760612, 4.402142), # 38 right brow right corner
(5.311432, 5.485328, 3.987654), # 13 left eye left corner
(1.789930, 5.393625, 4.413414), # 17 left eye right corner
(-1.789930, 5.393625, 4.413414), # 25 right eye left corner
(-5.311432, 5.485328, 3.987654), # 21 right eye right corner
(2.005628, 1.409845, 6.165652), # 55 nose left corner
(-2.005628, 1.409845, 6.165652), # 49 nose right corner
(2.774015, -2.080775, 5.048531), # 43 mouth left corner
(-2.774015, -2.080775, 5.048531), # 39 mouth right corner
(0.000000, -3.116408, 6.097667), # 45 mouth central bottom corner
(0.000000, -7.415691, 4.070434) # 6 chin corner
])
# Camera internals
focal_length = img_size[1]
center = (img_size[1] / 2, img_size[0] / 2)
camera_matrix = np.array(
[[focal_length, 0, center[0]],
[0, focal_length, center[1]],
[0, 0, 1]], dtype="double"
)
dist_coeffs = np.array([7.0834633684407095e-002, 6.9140193737175351e-002, 0.0, 0.0, -1.3073460323689292e+000],
dtype="double") # Assuming no lens distortion
(success, rotation_vector, translation_vector) = cv2.solvePnP(model_points, image_points, camera_matrix,
dist_coeffs, flags=cv2.SOLVEPNP_ITERATIVE)
# print("Rotation Vector:\n {}".format(rotation_vector))
# print("Translation Vector:\n {}".format(translation_vector))
return success, rotation_vector, translation_vector, camera_matrix, dist_coeffs
def draw_annotation_box(image, rotation_vector, translation_vector, camera_matrix, dist_coeefs, color=(0, 255, 0),
line_width=2):
"""
@Time : 2023/06/05 22:09:14
@Author : liruilonger@gmail.com
@Version : 1.0
@Desc : 标记一个人脸朝向的3D框
Args:
Returns:
void
"""
"""Draw a 3D box as annotation of pose"""
point_3d = []
rear_size = 10
rear_depth = 0
point_3d.append((-rear_size, -rear_size, rear_depth))
point_3d.append((-rear_size, rear_size, rear_depth))
point_3d.append((rear_size, rear_size, rear_depth))
point_3d.append((rear_size, -rear_size, rear_depth))
point_3d.append((-rear_size, -rear_size, rear_depth))
front_size = 10
# 高度
front_depth = 10
point_3d.append((-front_size, -front_size, front_depth))
point_3d.append((-front_size, front_size, front_depth))
point_3d.append((front_size, front_size, front_depth))
point_3d.append((front_size, -front_size, front_depth))
point_3d.append((-front_size, -front_size, front_depth))
point_3d = np.array(point_3d, dtype=np.float32).reshape(-1, 3)
# Map to 2d image points
(point_2d, _) = cv2.projectPoints(point_3d,
rotation_vector,
translation_vector,
camera_matrix,
dist_coeefs)
point_2d = np.int32(point_2d.reshape(-1, 2))
# Draw all the lines
cv2.polylines(image, [point_2d], True, color, line_width, cv2.LINE_AA)
cv2.line(image, tuple(point_2d[1]), tuple(
point_2d[6]), color, line_width, cv2.LINE_AA)
cv2.line(image, tuple(point_2d[2]), tuple(
point_2d[7]), color, line_width, cv2.LINE_AA)
cv2.line(image, tuple(point_2d[3]), tuple(
point_2d[8]), color, line_width, cv2.LINE_AA)
# 从旋转向量转换为欧拉角
def get_euler_angle(rotation_vector):
"""
@Time : 2023/06/05 22:31:52
@Author : liruilonger@gmail.com
@Version : 1.0
@Desc : 从旋转向量转换为欧拉角
Args:
Returns:
void
"""
# calculate rotation angles
theta = cv2.norm(rotation_vector, cv2.NORM_L2)
# transformed to quaterniond
w = math.cos(theta / 2)
x = math.sin(theta / 2) * rotation_vector[0][0] / theta
y = math.sin(theta / 2) * rotation_vector[1][0] / theta
z = math.sin(theta / 2) * rotation_vector[2][0] / theta
ysqr = y * y
# pitch (x-axis rotation)
t0 = 2.0 * (w * x + y * z)
t1 = 1.0 - 2.0 * (x * x + ysqr)
# print('t0:{}, t1:{}'.format(t0, t1))
pitch = math.atan2(t0, t1)
# yaw (y-axis rotation)
t2 = 2.0 * (w * y - z * x)
if t2 > 1.0:
t2 = 1.0
if t2 < -1.0:
t2 = -1.0
yaw = math.asin(t2)
# roll (z-axis rotation)
t3 = 2.0 * (w * z + x * y)
t4 = 1.0 - 2.0 * (ysqr + z * z)
roll = math.atan2(t3, t4)
print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))
# 单位转换:将弧度转换为度
pitch_degree = int((pitch / math.pi) * 180)
yaw_degree = int((yaw / math.pi) * 180)
roll_degree = int((roll / math.pi) * 180)
return 0, pitch, yaw, roll, pitch_degree, yaw_degree, roll_degree
def get_pose_estimation_in_euler_angle(landmark_shape, im_szie):
try:
ret, image_points = get_image_points_from_landmark_shape(landmark_shape)
if ret != 0:
print('get_image_points failed')
return -1, None, None, None
ret, rotation_vector, translation_vector, camera_matrix, dist_coeffs = get_pose_estimation(im_szie,
image_points)
if ret != True:
print('get_pose_estimation failed')
return -1, None, None, None
ret, pitch, yaw, roll = get_euler_angle(rotation_vector)
if ret != 0:
print('get_euler_angle failed')
return -1, None, None, None
euler_angle_str = 'Pitch:{}, Yaw:{}, Roll:{}'.format(pitch, yaw, roll)
print(euler_angle_str)
return 0, pitch, yaw, roll
except Exception as e:
print('get_pose_estimation_in_euler_angle exception:{}'.format(e))
return -1, None, None, None
def build_img_text_marge(img_, text, height):
"""
@Time : 2023/06/01 05:29:09
@Author : liruilonger@gmail.com
@Version : 1.0
@Desc : 生成文字图片拼接到 img 对象
Args:
Returns:
void
"""
import cv2
from PIL import Image, ImageDraw, ImageFont
# 定义图片大小和背景颜色
width = img_.shape[1]
background_color = (255, 255, 255)
# 定义字体、字号和颜色
font_path = 'arial.ttf'
font_size = 26
font_color = (0, 0, 0)
# 创建空白图片
image = Image.new('RGB', (width, height), background_color)
# 创建画笔
draw = ImageDraw.Draw(image)
# 加载字体
font = ImageFont.truetype(font_path, font_size)
# 写入文字
text_width, text_height = draw.textsize(text, font)
text_x = (width - text_width) // 2
text_y = (height - text_height) // 2
draw.text((text_x, text_y), text, font=font, fill=font_color)
# 将Pillow图片转换为OpenCV图片
image_cv = cv2.cvtColor(np.array(image), cv2.COLOR_RGB2BGR)
montage_size = (width, img_.shape[0])
import imutils
montages = imutils.build_montages([img_, image_cv], montage_size, (1, 2))
# 保存图片
return montages[0]
if __name__ == '__main__':
from imutils import paths
# for imagePath in paths.list_images("W:\\python_code\\deepface\\huge_1.jpg"):
for imagePath in range(1):
print(f"处理的图片路径为: {imagePath}")
# Read Image
im = cv2.imread("image.jpg")
size = im.shape
# 对图像进行缩放的操作
if size[0] > 700:
h = size[0] / 3
w = size[1] / 3
# 如果图像的高度大于700,就将其高度和宽度分别缩小为原来的1/3,然后使用双三次插值的方法进行缩放。最后返回缩放后的图像的大小。
im = cv2.resize(im, (int(w), int(h)), interpolation=cv2.INTER_CUBIC)
size = im.shape
# 获取坐标点
ret, image_points = get_image_points(im)
if ret != 0:
print('get_image_points failed')
continue
ret, rotation_vector, translation_vector, camera_matrix, dist_coeffs = get_pose_estimation(size, image_points)
if ret != True:
print('get_pose_estimation failed')
continue
draw_annotation_box(im, rotation_vector, translation_vector, camera_matrix, dist_coeffs)
cv2.imwrite('new_' + "draw_annotation_box.jpg", im)
ret, pitch, yaw, roll, pitch_degree, yaw_degree, roll_degree = get_euler_angle(rotation_vector)
draw = im.copy()
# Yaw:
if yaw_degree < 0:
output_yaw = "left : " + str(abs(yaw_degree)) + " degrees"
elif yaw_degree > 0:
output_yaw = "right :" + str(abs(yaw_degree)) + " degrees"
else:
output_yaw = "No left or right"
print(output_yaw)
# Pitch:
if pitch_degree > 0:
output_pitch = "dow :" + str(abs(pitch_degree)) + " degrees"
elif pitch_degree < 0:
output_pitch = "up :" + str(abs(pitch_degree)) + " degrees"
else:
output_pitch = "No downwards or upwards"
print(output_pitch)
# Roll:
if roll_degree < 0:
output_roll = "bends to the right: " + str(abs(roll_degree)) + " degrees"
elif roll_degree > 0:
output_roll = "bends to the left: " + str(abs(roll_degree)) + " degrees"
else:
output_roll = "No bend right or left."
print(output_roll)
# Initial status:
if abs(yaw) < 0.00001 and abs(pitch) < 0.00001 and abs(roll) < 0.00001:
cv2.putText(draw, "Initial ststus", (20, 40), cv2.FONT_HERSHEY_SIMPLEX, .5, (0, 255, 0))
print("Initial ststus")
# 姿态检测完的数据写在对应的照片
imgss = build_img_text_marge(im, output_yaw + "\n" + output_pitch + "\n" + output_roll, 200)
cv2.imwrite('new_' + str(uuid.uuid4()).replace('-', '') + ".jpg", imgss)
博文部分内容参考
© 文中涉及参考链接内容版权归原作者所有,如有侵权请告知,这是一个开源项目,如果你认可它,不要吝啬星星哦 😃
https://blog.csdn.net/zhang2gongzi/article/details/124520896
https://github.com/JuneoXIE/
https://github.com/yinguobing/head-pose-estimation
© 2018-2023 liruilonger@gmail.com, All rights reserved. 保持署名-非商用-相同方式共享(CC BY-NC-SA 4.0)