目录
1、手动创建设备文件
2、应用程序如何将数据传递给驱动
3、控制LED灯:
4、应用层控制灯
5、自动创建设备节点
1、手动创建设备文件
cat /proc/devices 查看主设备号
sudo mknod hello(路径:任意的) c/b(C代表字符设备 b代表块设备)主设备号 次设备号
生成hello:应用层可以打开的文件

设置驱动层程序:hello.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/printk.h>
#include <linux/fs.h> //添加头文件
#define CNAME "hello"
int major=0;
ssize_t mycdev_read (struct file *file, char __user *user, size_t size, loff_t * loff)
{
printk("this is read\n");
return 0;
}
ssize_t mycdev_write (struct file *file, const char __user *user, size_t size, loff_t *loff)
{
printk("this is write\n");
return 0;
}
int mycdev_open (struct inode *inode, struct file *file)
{
printk("this is open\n");
return 0;
}
int mycdev_release (struct inode *inode, struct file *file)
{
printk("this is close\n");
return 0;
}
const struct file_operations fops={
.open=mycdev_open,
.read=mycdev_read,
.write=mycdev_write,
.release=mycdev_release,
};
static int __init hello_init(void)//入口
{
major=register_chrdev(major,CNAME,&fops);
if(major<0)
{
printk("register chrdev error");
}
return 0;
}
static void __exit hello_exit(void)//出口
{
unregister_chrdev(major,CNAME);
}
module_init(hello_init);//告诉内核驱动的入口
module_exit(hello_exit);//告诉内核驱动的出口
MODULE_LICENSE("GPL");
设置应用层程序:test.c![]()
2、应用程序如何将数据传递给驱动
(读写的方向是站在用户的角度来说的)
#include <linux/uaccess.h>int copy_from_user(void *to, const void __user *from, int n)
功能:从用户空间拷贝数据到内核空间
参数:
@to :内核中内存的首地址
@from:用户空间的首地址
@n :拷贝数据的长度(字节)
返回值:成功返回0,失败返回未拷贝的字节的个数
int copy_to_user(void __user *to, const void *from, int n)
功能:从内核空间拷贝数据到用户空间
参数:
@to :用户空间内存的首地址
@from:内核空间的首地址 __user需要加作用是告诉编译器这是用户空间地址
@n :拷贝数据的长度(字节)
返回值:成功返回0,失败返回未拷贝的字节的个数
驱动层:hello.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/printk.h>
#include <linux/uaccess.h> //添加头文件
#include <linux/fs.h>
#define CNAME "hello"
int major=0;
char kbuf[128]={0}; //存储数据
int dev=0;
ssize_t mycdev_read (struct file *file, char __user *user, size_t size, loff_t * loff)
{
//printk("this is read\n");
if(size>sizeof(kbuf))
{
size=sizeof(kbuf);
}
dev=copy_to_user(user,kbuf,size); //从内核空间到用户空间
if(dev)
{
printk("copy to user err");
return dev;
}
return 0;
}
ssize_t mycdev_write (struct file *file, const char __user *user, size_t size, loff_t *loff)
{
//printk("this is write\n");
if(size>sizeof(kbuf))
{
size=sizeof(kbuf);
}
dev=copy_from_user(kbuf,user,size); //从用户空间到内核空间
return 0;
}
int mycdev_open (struct inode *inode, struct file *file)
{
printk("this is open\n");
return 0;
}
int mycdev_release (struct inode *inode, struct file *file)
{
printk("this is close\n");
return 0;
}
const struct file_operations fops={
.open=mycdev_open,
.read=mycdev_read,
.write=mycdev_write,
.release=mycdev_release,
};
static int __init hello_init(void)//入口
{
major=register_chrdev(major,CNAME,&fops);
if(major<0)
{
printk("register chrdev error");
}
return 0;
}
static void __exit hello_exit(void)//出口
{
unregister_chrdev(major,CNAME);
}
module_init(hello_init);//告诉内核驱动的入口
module_exit(hello_exit);//告诉内核驱动的出口
MODULE_LICENSE("GPL");应用程序:test.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
char buf[128]="hello world!";
int main(int argc, const char *argv[])
{
int fd;
fd=open("./hello",O_RDWR);
if(fd==-1)
{
perror("open error");
return -1;
}
write(fd,buf,sizeof(buf));
memset(buf,0,sizeof(buf));
read(fd,buf,sizeof(buf));
printf("buf is :%s\n",buf);
close(fd);
return 0;
}
$make
$sudo insmod hello.ko
$gcc test.c
$./a.out

$dmesg

3、控制LED灯:
驱动如何操作寄存器
rgb_led灯的寄存器是物理地址,在linux内核启动之后,在使用地址的时候操作的全是虚拟地址,需要将物理地址转化为虚拟地址。在驱动代码中操作的虚拟地址就相当于操作实际的物理地址。
物理地址<------>虚拟地址
void * ioremap(phys_addr_t offset, unsigned long size)
功能:将物理地址映射成虚拟地址
参数:@offset :要映射的物理地址
@size :大小(字节)
返回值:成功返回虚拟地址,失败返回NULL;
void iounmap(void *addr)
功能:取消映射
参数: @addr :虚拟地址
返回值:无
RGB_led
red :gpioa28
GPIOXOUT :控制高低电平的 0xC001A000
GPIOxOUTENB:输入输出模式 0xC001A004
GPIOxALTFN1:function寄存器 0xC001A024
green:gpioe13 0xC001e000
blue :gpiob12 0xC001b000

R:GPIOA
G: GPIOE

B: GPIOB

宏定义基地址 ,设置虚拟地址

将物理地址映射成虚拟地址
指针类型加1是加的类型大小

添加头文件:#include <linux/io.h>
取消映射:
将hello.ko拷贝到开发板内核文件夹中 指针类型加1是加的类型大小
指针类型加1是加的类型大小
#include <linux/init.h>
#include <linux/module.h>
#include <linux/printk.h>
#include <linux/uaccess.h>
#include <linux/fs.h>
#include <linux/io.h> //添加头文件
int major=0;
#define CNAME "hello"
char kbuf[128]={0};
int dev=0;
#define RED_BASE 0XC001A000
#define BLUE_BASE 0XC001B000
#define GREEN_BASE 0XC001E000
unsigned int *red_base=NULL;
unsigned int *blue_base=NULL;
unsigned int *green_base=NULL;
ssize_t mycdev_read (struct file *file, char __user *user, size_t size, loff_t * loff)
{
//printk("this is read");
if(size>128){
size=128;
}
dev=copy_to_user(user,kbuf,size);
if(dev)
{
printk("copy to user errer");
return dev;
}
return 0;
}
ssize_t mycdev_write (struct file *file, const char __user *user, size_t size, loff_t *loff)
{
//printk("this is write");
if(size>128){
size=128;
}
dev=copy_from_user(kbuf,user,size);
return 0;
}
int mycdev_open (struct inode *inode, struct file *file)
{
printk("this is open");
return 0;
}
int mycdev_release (struct inode *inode, struct file *file)
{
printk("this is close");
return 0;
}
const struct file_operations fops={
.open=mycdev_open,
.read=mycdev_read,
.write=mycdev_write,
.release=mycdev_release,
};
static int __init hello_init(void)//入口
{
major=register_chrdev(major,CNAME,&fops);
if(major<0)
{
printk("register chrdev error");
}
red_base=ioremap(RED_BASE,36);
if(red_base==NULL)
{
printk("red ioremap error\n");
return -ENOMEM;
}
blue_base=ioremap(BLUE_BASE,36);
if(blue_base==NULL)
{
printk("blue ioremap error\n");
return -ENOMEM;
}
green_base=ioremap(GREEN_BASE,36);
if(green_base==NULL)
{
printk("green ioremap error\n");
return -ENOMEM;
}
*red_base &=~(1<<28);
*(red_base+1) |=1<<28; //指针类型加1是加的类型大小 int占4字节
*(red_base+9) &=~(3<<24);
return 0;
}
static void __exit hello_exit(void)//出口
{
iounmap(green_base);
iounmap(blue_base);
iounmap(red_base);
unregister_chrdev(major,CNAME);
}
module_init(hello_init);//告诉内核驱动的入口
module_exit(hello_exit);//告诉内核驱动的出口
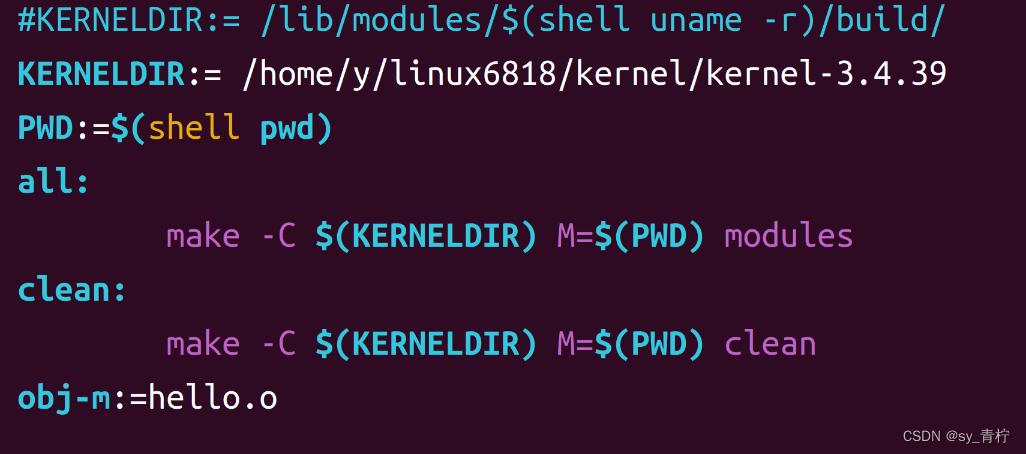
MODULE_LICENSE("GPL");Makefile:
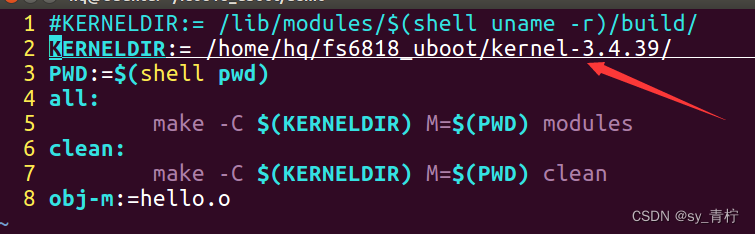
4、应用层控制灯
驱动层
判断语句 、宏定义开关
#define RED_ON *red_base |= 1<<28
#define RED_OF *red_base &= ~(1<<28)
ssize_t mycdev_write (struct file *file, const char __user *user, size_t size, loff_t *loff)
{
//printk("this is write");
if(size>128){
size=128;
}
dev=copy_from_user(kbuf,user,size);
if(kbuf[0]==1)
{
RED_ON;
}
else{
RED_OF;
}
return 0;
}
应用层
需要将test.c 在开发板中进行编译,还需要拷贝编译生成的a.out,所以直接在Makefile中添加两行代码:
while(1)
{
write(fd,buf,sizeof(buf));
sleep(1);
buf[0]=buf[0]?0:1;
}




5、自动创建设备节点
头文件:#include <linux/device.h>
自动创建设备节点:
struct class *cls;
cls = class_create(owner, name) /void class_destroy(struct class *cls)
功能:向用户空间提交目录信息
参数:
@owner :THIS_MODULE (宏,固定格式)
@name :目录名字
返回值:成功返回struct class *指针
失败返回错误码指针 int (-5)
if(IS_ERR(cls)){ //将错误码指针转换为错误码
printk("class _create error");
return IS_ERR(cls);
}
struct device *device_create(struct class *class, struct device *parent,
dev_t devt, void *drvdata, const char *fmt, ...)
void device_destroy(struct class *class, dev_t devt)
功能:向用户空间提交文件信息
参数:
@class :目录名字 cls(向用户空间提交目录信息时产生的返回值)
@parent:NULL
@devt :设备号 MKDEV(major,0)
@drvdata :NULL
@fmt :文件的名字
返回值:成功返回struct device *指针
失败返回错误码指针 int (-5)
struct class*cls;
struct device *dev;
//自动创建设备节点
cls = class_create(THIS_MODULE,CNAME);
if(IS_ERR(cls)){
printk("class create error\n");
return PTR_ERR(cls);
}
dev = device_create(cls,NULL,MKDEV(major,0),NULL
,CNAME);
if(IS_ERR(dev)){
printk("device create error\n");
return PTR_ERR(dev);
}
声明处:

入口处:



//出口-》这里写了卸载时注销的函数
static void __exit hello_exit(void)//出口
{
device_destroy(devc,MKDEV(major,1));//注销内容
class_destroy(cls);//注销目录
iounmap(green_base);
iounmap(blue_base);
iounmap(red_base);
unregister_chrdev(major,CNAME);
}
注意:MKDEV(major,0)为一个宏用于配置主设备号和次设备号

make
自动创建设备节点建立在dev里