转自:嵌入式系统研发
1.概述
本文主要讲述了Linux的PWM驱动框架、实现方法、驱动添加方法和调试方法。
示例Linux内核版本:6.2.8。
2.原理
PWM是Pulse-Width Modulation的简称,中文译作脉冲宽度调制。作为一种调制技术,PWM的原理是通过调整周期性波形的高电平时间宽度,从而改变有效信号的占空比,实现对设备的供电控制。PWM技术的常见应用领域包括屏幕背光亮度调节、电机转速控制和风扇转速控制等。
Linux内核支持PWM驱动框架,该驱动框架采用结构体数据类型对PWM控制器和PWM信号进行了抽象,提供了PWM驱动框架核心代码和sysfs接口代码。PWM驱动开发者可以方便地利用该驱动框架,添加特定PWM控制器的驱动程序,并使用sysfs接口进行功能调试。
3.驱动框架及实现方法
3.1驱动框架源码
PWM驱动框架的主要源码:
./include/linux/pwm.h //PWM驱动框架头文件
./drivers/pwm/core.c //PWM驱动框架核心代码
./drivers/pwm/sysfs.c //PWM驱动框架sysfs接口代码
3.2驱动框架数据结构
- (1)struct pwm_chip结构体,表示PWM控制器。
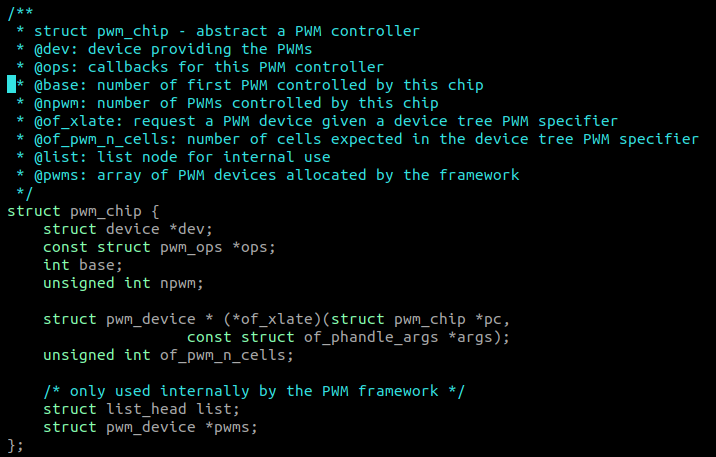
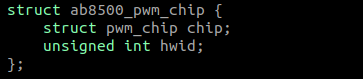
驱动开发者可以根据需要设计专用的PWM控制器结构体,以struct pwm_chip结构体作为一个成员变量,下面是一个示例,在./drivers/pwm/pwm-ab8500.c驱动中定义。
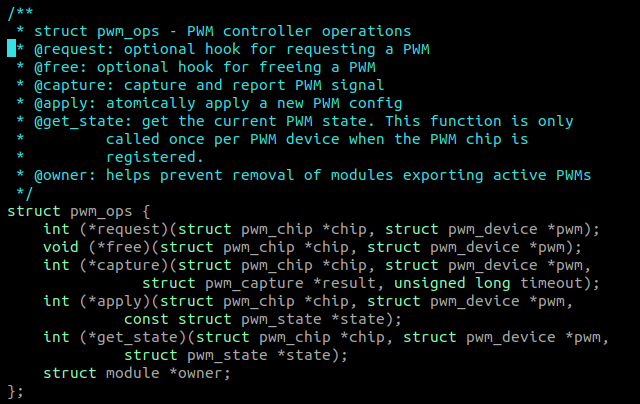
- (2)struct pwm_ops结构体,包括PWM控制器的操作函数。其中应该由驱动开发者实现的2个基础函数为apply函数和get_state函数;apply函数用于配置PWM控制器,包括配置PWM信号的使能状态、周期、占空比、极性等;get_state函数用于在注册PWM控制器时获取指定PWM通道信号的初始状态,包括使能状态、周期、占空比、极性等。
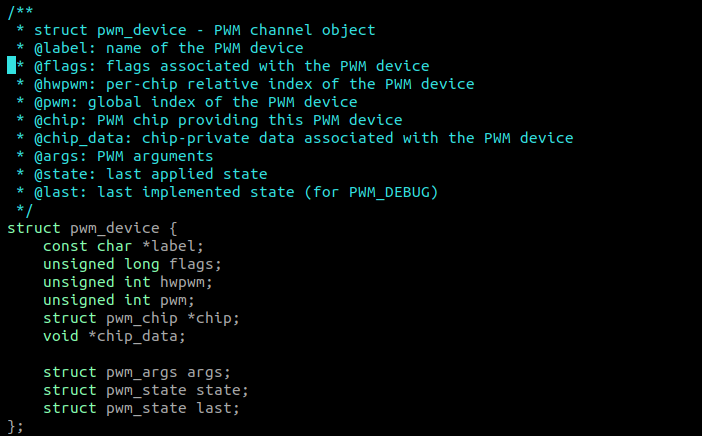
- (3)struct pwm_device结构体,表示PWM控制器输出的PWM信号。
3.3驱动框架核心函数
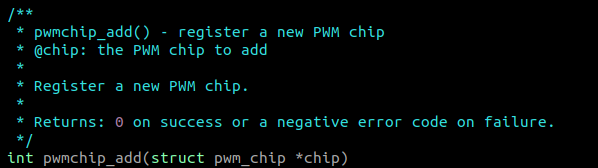
- (1)pwmchip_add函数。用于注册一个新的PWM控制器设备。在./drivers/pwm/core.c中定义。
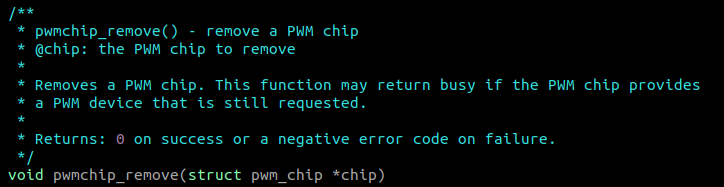
- (2)pwmchip_remove函数。用于移除一个PWM控制器设备。在./drivers/pwm/core.c中定义。
3.4驱动典型实现方法
- (1)概要
PWM驱动源文件位于./drivers/pwm路径下,需要驱动开发者添加相应的源文件即可,源文件设计可参考其他厂家的驱动代码。参考原有代码的命名风格,可以将新添加的驱动源文件命名为pwm-xx.c,将probe和remove函数分别命名为xx_pwm_probe和xx_pwm_remove,将PWM控制器结构体定义为struct xx_pwm_chip。./drivers/pwm路径下文件如下。

-
(2)apply函数和get_state函数定义
根据PWM控制器手册,由驱动开发者定义apply函数和get_state函数。
-
(3)xx_pwm_probe函数定义
xx_pwm_probe函数的实现方法为:首先对PWM控制器结构体struct xx_pwm_chip变量进行初始化,然后调用PWM驱动框架核心函数pwmchip_add注册一个新的PWM控制器设备。
-
(4)xx_pwm_remove函数定义
xx_pwm_remove函数的实现方法为:调用PWM驱动框架核心函数pwmchip_remove移除一个PWM控制器设备。
4.驱动添加方法
4.1添加驱动源文件
按3.4节所述方法,编写驱动源文件pwm-xx.c,添加到./drivers/pwm路径下。
4.2添加编译支持
-
(1)修改./drivers/pwm路径下的Kconfig文件,添加所添加的PWM驱动配置选项。
-
(2)修改./drivers/pwm路径下的Makefile文件,添加pwm-xx.c的编译选项。
-
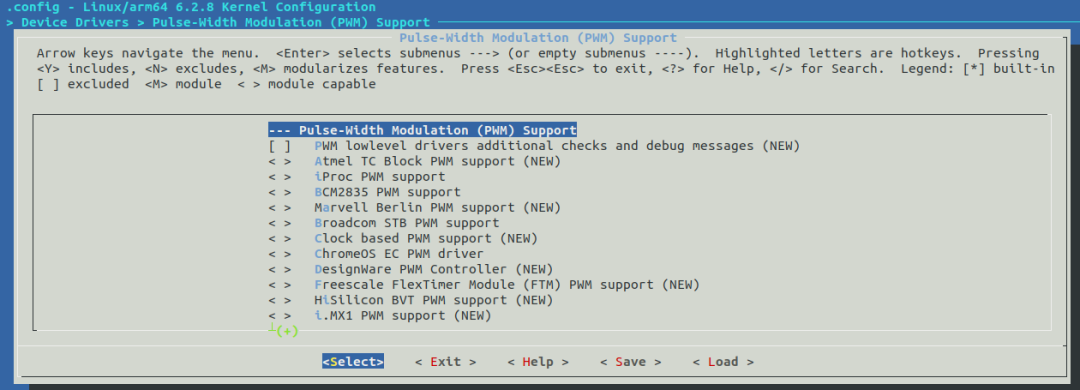
(3)在memuconfig界面,使能所添加的PWM驱动。配置界面如下所示。
4.3添加PWM控制器设备树节点
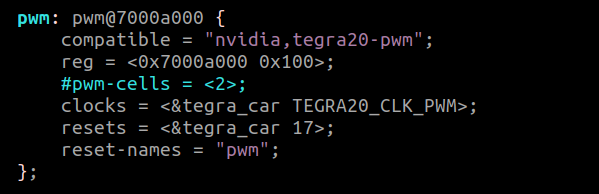
在设备树添加PWM控制器设备树节点。该节点的基本属性包括兼容性、寄存器和#pwm-cells数量,按需添加中断、时钟、复位等属性。
PWM控制器设备树设计方法可参考./Documentation/devicetree/bindings/pwm。
下面是PWM控制器设备树节点的示例。参考文档如下:
./Documentation/devicetree/bindings/pwm/nvidia,tegra20-pwm.yaml。
5.调试方法
使用sysfs接口对PWM驱动进行功能调试,主要调试命令示例如下。
- (1)查看PWM控制器节点
ls /sys/class/pwm/pwmchip0
- (2)打开指定PWM通道信号
echo n > /sys/class/pwm/pwmchip0/export
//n为通道编号
- (3)设置PWM信号周期
echo pvalue > /sys/class/pwm/pwmchip0/pwm0/period
//pvalue为周期值
- (4)设置PWM信号占空比
echo dvalue > /sys/class/pwm/pwmchip0/pwm0/duty_cycle
//dvalue为有效电平宽度值
- (5)使能某个PWM通道信号
echo 1 > /sys/class/pwm/pwmchip0/pwm0/enable
- (6)禁止某个PWM通道信号
echo 0 > /sys/class/pwm/pwmchip0/pwm0/enable