小觅相机型号:深度版,视场角50°
ROS版本:nodelet
1.使用Calibrator获取相机的标定参数,或者用小觅相机自带的sdk获取:
calibrator可以参考:ROS系统-摄像头标定camera calibration
小觅自带sdk参考:获取图像标定参数
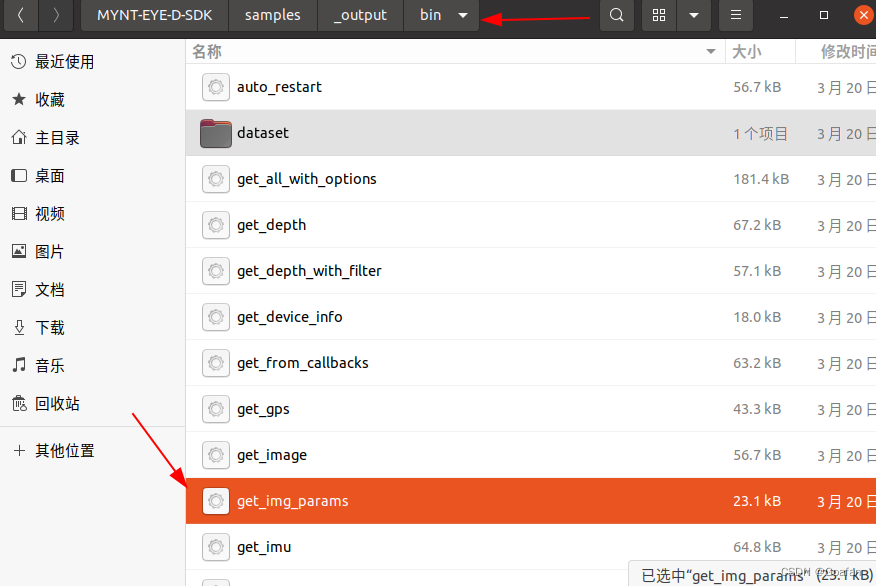
或者小觅的ROS包编译后,会生成 这个get_img_params文件,直接 ./ 运行一下,就可以在当前目录生成标定参数的文件。
HD Intrinsics left: {width: [1280], height: [720], fx: [709.60461425781250000], fy: [709.84454345703125000], cx: [618.37634277343750000], cy: [364.70184326171875000], coeffs: 

![[数据结构 -- 手撕排序算法第一篇] 堆排序,一篇带你搞懂堆排序](https://img-blog.csdnimg.cn/img_convert/7c3e7bac40d5370d3ff4ff7da20481da.png)