文章目录
- 一、模块和接线
- 二、CubeMX配置
- 1.时钟及sys
- 2.IO口
- 1)数据线DT设置为Input
- 2)时钟线SCK设置为Output
- 3.串口
- 4.后续配置
- 三、程序
- 1.main.c
- 2.hx711.c
- 3.hx711.h
- 4.串口重定向
- 总结
- 参考文章
提示:以下是本篇文章正文内容,下面案例可供参考
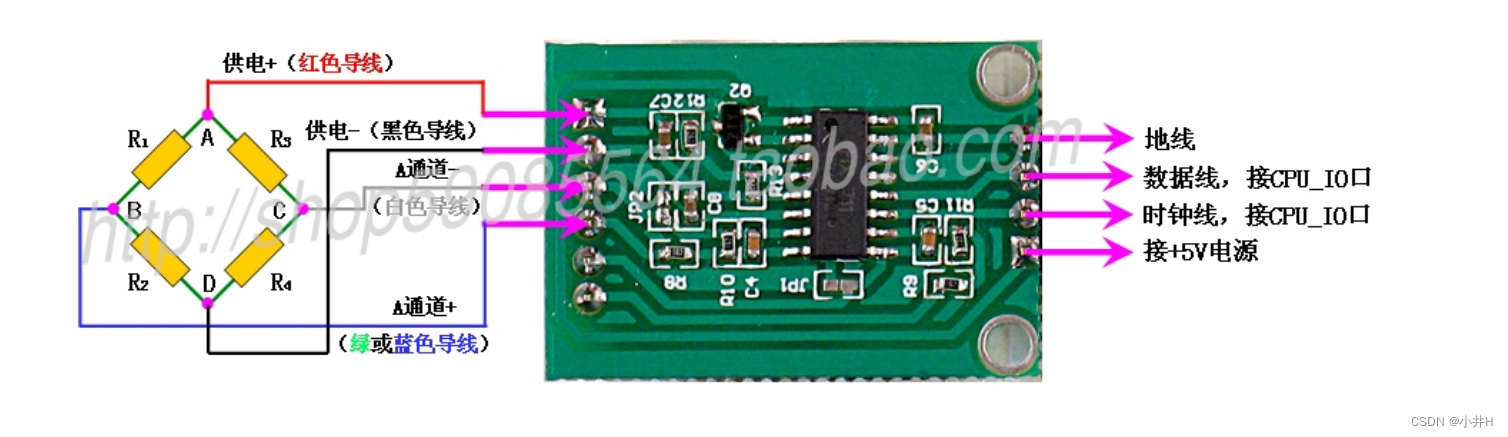
一、模块和接线
传感器连接hx711,hx711连接STM32,如下图所示
二、CubeMX配置
1.时钟及sys



2.IO口
1)数据线DT设置为Input

2)时钟线SCK设置为Output

3.串口
打开串口并选择中断,其他配置保持不变

4.后续配置


三、程序
1.main.c
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
extern uint8_t ReceiveBuff[BUFFERSIZE];
extern uint8_t recv_end_flag,Rx_len;
extern uint32_t weight_first;
extern uint32_t weight_real;
uint32_t weight_print = 0;//质量打印
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART6_UART_Init();
/* USER CODE BEGIN 2 */
printf("压力传感器HX711\r\n");
weight_first = ReadCount();//首次读取重量进行去皮操作
printf("首次质量weight_first=%d\n",weight_first);
HAL_Delay(100);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
weight_print = WeightReal();//实际质量计算
printf("重量为:%dg\n",weight_print);
HAL_Delay(100);
}
/* USER CODE END 3 */
}
2.hx711.c
注:根据官方给出的程序写ReadCount,红色框程序要稍微改一下。将ADSK=1;与ADSK=0;看作一个数据传输周期的开始和结束,if语句中count值仍在变化,等于数据传输还没结束,所以要将结束标志ADSK=0放到if语句后。

1ADSK=0;//指SCK时钟线电平置低。
2ADSK=1;//指SCK时钟线电平置高。
3while(ADDO);//判断AD转换器是否准备好(DOUT应为低电平),ADDO=0,程序正常进行,否则ADDO=1一直进行while循环。
4 i 的取值范围根据手册中的此处给出,为24-26,分别对应不同的通道和增益。
#include "hx711.h"
#include "stdio.h"
#include "stdint.h"
#include "gpio.h"
uint8_t ReceiveBuff[BUFFERSIZE]; //接收缓冲区
uint8_t recv_end_flag = 0,Rx_len;//接收完成中断标志,接收到字符长度
uint32_t weight_first = 0;//首次质量
uint32_t weight_real = 0;//每次读取的实际值
/***********************************************************************************************
*Name : ReadCount
*Function : 读取传感器数值,通道A,增益128
*Parameter : count 计数值
i 24位数据计数,改变i的值可选择不同通道和增益24~26
***********************************************************************************************/
uint32_t ReadCount(void)
{
uint32_t Count = 0;
uint8_t i = 0;
HAL_Delay(10);
HAL_GPIO_WritePin(SCK_GPIO_Port, SCK_Pin, GPIO_PIN_RESET);
while(HAL_GPIO_ReadPin(DT_GPIO_Port, DT_Pin));//判断AD转换器是否准备好(DOUT应为低电平)
for(i = 0; i <24; i++)//24
{
HAL_GPIO_WritePin(SCK_GPIO_Port, SCK_Pin, GPIO_PIN_SET);
Count = Count << 1;
if(HAL_GPIO_ReadPin(DT_GPIO_Port, DT_Pin))
{
Count ++;
}
HAL_GPIO_WritePin(SCK_GPIO_Port, SCK_Pin, GPIO_PIN_RESET);
}
HAL_GPIO_WritePin(SCK_GPIO_Port, SCK_Pin, GPIO_PIN_SET);
Count = Count ^ 0x800000;
HAL_GPIO_WritePin(SCK_GPIO_Port, SCK_Pin, GPIO_PIN_RESET);
return Count;
}
/***********************************************************************************************
*Name : ReadWeight
*Function : 读取拉力值
*Parameter : weight_real 实际拉力值
weight_first 传感器首次数据
***********************************************************************************************/
uint32_t WeightReal(void)
{
weight_real = ReadCount();//实际质量计算
if(weight_first>=weight_real)
{
weight_real = weight_first-weight_real;
weight_real = weight_real/100;
//printf("重量为:%dg\n",weight_real);
}
else
{
weight_real = weight_real-weight_first;
weight_real = weight_real/100;
//printf("重量为:-%dg\n",weight_real);
}
return weight_real;
}
3.hx711.h
#ifndef HX711
#define HX711
#include "stdint.h"
#define BUFFERSIZE 255 //可以接收的最大字符个数
uint32_t ReadCount(void);
uint32_t ReadWeight(void);
#endif
4.串口重定向
放在usart.c中
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart6, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
总结
提示:本文章学到的一个主要知识点是ReadCount函数中的
通讯逻辑是先将数据线电平拉高,代表数据开始传输,等待接收完数据后,数据线电平置低,数据传输结束。
参考文章
涂鸦模组开发(压力传感器HX711)——2. 压力传感器HX711

![安装指定版本docker [centos]](https://img-blog.csdnimg.cn/67555df7115d4c42bb7eac53f7a9a096.png)