PCL点云处理之三维凸包点提取与凸包模型生成,分别保存到PCD与PLY文件(一百七十一)
news2026/2/15 2:06:10

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/602814.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

华为OD机试真题B卷 Java 实现【报数游戏】,附详细解题思路
一、题目描述
100个人围成一圈,每个人有一个编码,编号从1开始到100。他们从1开始依次报数,报到为M的人自动退出圈圈,然后下一个人接着从1开始报数,直到剩余的人数小于M。请问最后剩余的人在原先的编号为多少ÿ…

Netty核心源码剖析(一)
准备工作
将Netty的源码包netty-all-4.1.20.Final-sources.jar添加到项目中; 在io.netty.example包下,有很多Netty源码案例,可以用来分析! 1.Netty启动过程源码剖析
1>.将io.netty.exampler.echo包下的文件复制到当前项目的其他目录中; 2>.EchoServer.java
/*** Ec…

建立第一个react页面
<body><!-- 准备一个容器 --><div id"test"></div><!-- 必须在周边库之前引入核心库 --><script type"text/javascript"src"./js/react.development.js"></script><!-- 引入周边库 --><scr…

实战项目!上位机与PLC通讯
大家好,我是华山自控编程朱老师,今天给大家介绍下我之前设计的入门项目——工件正反面识别及角度测试系统 系统功能
首先,系统的功能包括识别工件正反面,测试工件旋转角度。这些任务是由PLC来控制工件传送、启动拍照以及上位机。…
张小飞的Java之路——第四十三章——字符流
写在前面:
视频是什么东西,有看文档精彩吗?
视频是什么东西,有看文档速度快吗?
视频是什么东西,有看文档效率高吗?
诸小亮:接下来我们学习——字符流
张小飞:刚才的…

第二十三篇、基于Arduino uno,控制RGB灯亮灭——结果导向
0、结果
说明:RGB灯亮红色,一秒钟闪烁一次,可以很方便的更改灯的颜色,如果是你想要的,可以接着往下看。
1、外观
说明:RGB灯有共阴极的,也有共阳极的,从外观上是看不出来的&#…

C++ 学习 ::【基础篇:12】:C++ 类的基本成员函数:构造函数基本的定义与调用 |(无参构造与有参构造及缺省参数式构造)
本系列 C 相关文章 仅为笔者学习笔记记录,用自己的理解记录学习!C 学习系列将分为三个阶段:基础篇、STL 篇、高阶数据结构与算法篇,相关重点内容如下: 基础篇:类与对象(涉及C的三大特性等&#…
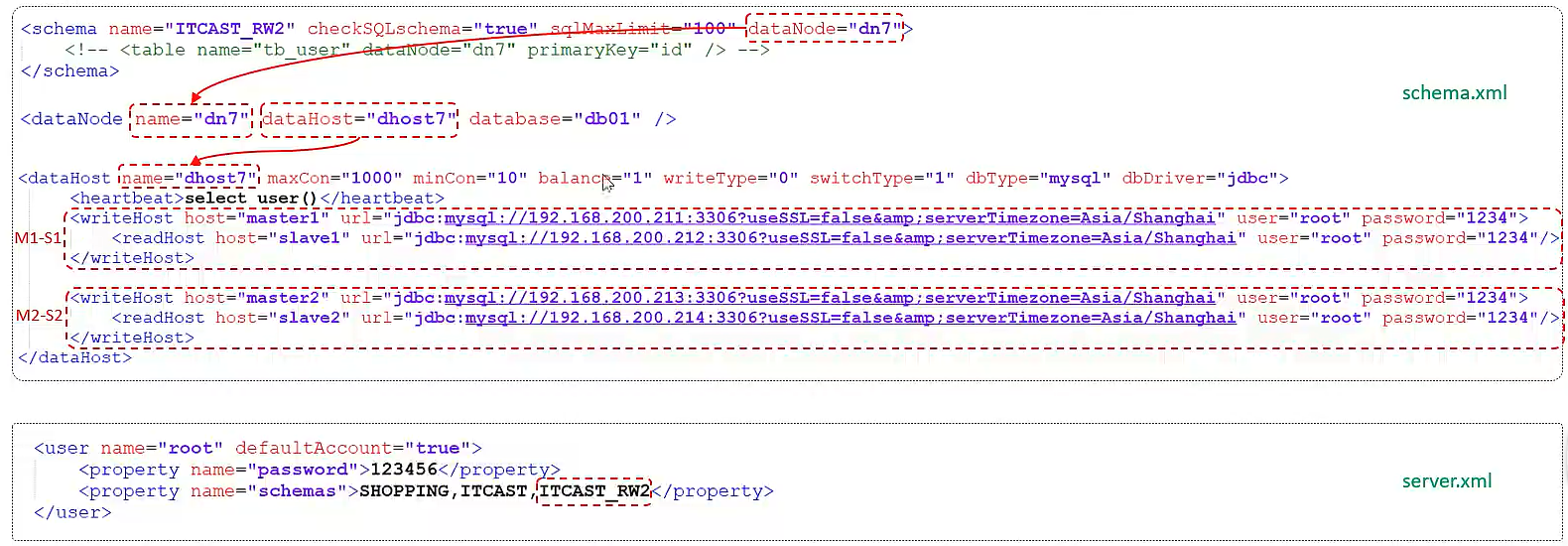
MySQL - 读写分离、一主一从、双主双从
文章目录 读写分离一、介绍二、一主一从2.1 原理2.2 服务器准备2.3 一主一从读写分离2.3.1 MyCat 配置2.3.1.1 schema.xml2.3.1.2 server.xml配置 三、双主双从3.1 双主双从介绍3.2 服务器准备3.3 双主双从读写分离3.3.1 主库配置3.3.1.1 211主库配置3.3.1.2 213主库配置 3.3.2…

rknn ffmpeg硬解码环境配置以及调用代码
查看rk3588系统信息
cat /proc/version
本编译在 Debain/ubuntu20.04
这两家板子上编译成功。
安装依赖
sudo apt-get install libx264-dev
sudo apt-get install libfaac-dev
sudo apt-get install libmp3lame-dev
sudo apt-get install libtheora-dev
sud…
综合能效管理:全面助力企业节能降耗 86型双联明装墙插面板智选套装上市
能源的综合利用效率主要体现在安全性、节能性及经济性方面。随着物联网智能技术的发展,能源监测与安全监控管理不仅面向能源生产、存储、传输、配送、运用环节,还需要更广泛地、深入地涵盖到分布式能源节点的能源使用消耗的全过程,基于对用户…

官宣代言人王一博,老板电器为打开厨电增量市场提供新思路
文丨智能相对论
作者丨佘凯文
最近两年,全球都处于一个经济结构调整的时期,许多行业深受影响。像国内厨电行业,在诸多因素影响下,就迈向了稳定发展的新常态。
与此同时,行业内部竞争也开始发生改变,从过…

自学黑客(网络安全),一般人我劝你还是算了吧(自学网络安全学习路线--第一章 网络协议基础 )
一、自学网络安全学习的误区和陷阱
1.不要试图先成为一名程序员(以编程为基础的学习)再开始学习 我在之前的回答中,我都一再强调不要以编程为基础再开始学习网络安全,一般来说,学习编程不但学习周期长,而且…

5月面试碰壁15次,我哭了....
3年测试经验原来什么都不是,只是给你的简历上画了一笔,一直觉得经验多,无论在哪都能找到满意的工作,但是现实却是给我打了一个大巴掌!事后也不会给糖的那种...
先说一下自己的个人情况,普通二本计算机专业…
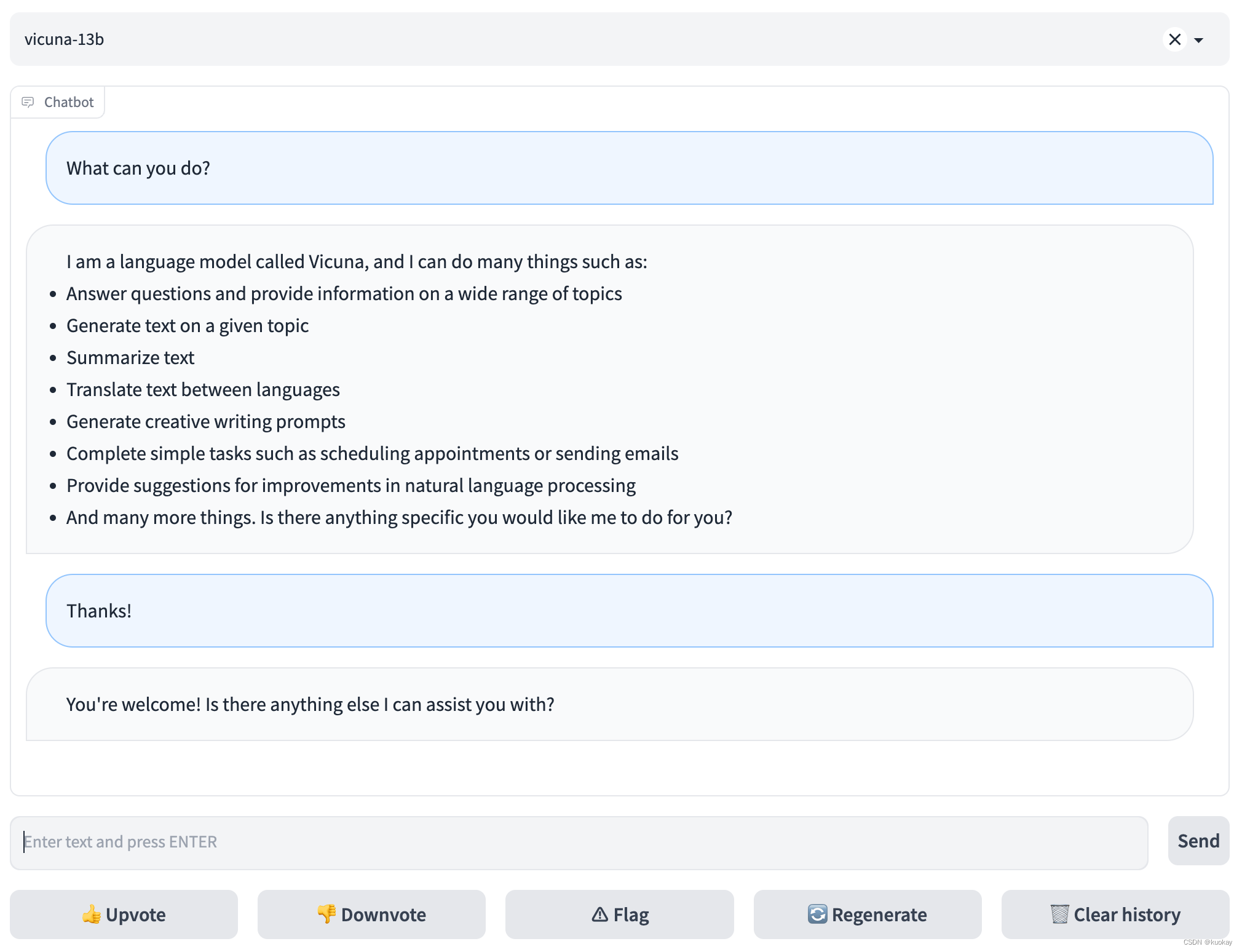
FastChat(小羊驼模型)部署体验
简介
前段时间,斯坦福发布了Alpaca,是由Meta的LLaMA 7B微调而来,仅用了52k数据,性能可以与GPT-3.5匹敌。
FastChat集成了Vicuna、Koala、alpaca、llama等开源模型,其中Vicuna号称能够达到gpt-4的90%的质量࿰…
Java基础(项目1)——项目设计分层 dao + service + test +ui + exception + log + util
目录 引出DAO层---和数据库交互1.通过IO流存储到dat文件2.通过JDBC存储到数据库【测试】用junit进行测试:Test注解 Service层---处理业务1.项目设计分层初步2.service处理业务相关3.和UI层以及dao层进行交互 UI层界面---控制台,单例模式1.创建单例的方法…
牛客-【237题】算法基础精选题单
2023年06月02日更新 NOIP2007 字符串的展开NOIP2009 多项式输出NOIP2010 机器翻译 NOIP2007 字符串的展开
第一道题目花费的时间是最多的,还wa了几次 需要特别注意的一个特殊情况时 1-a 这个时候a的ASCII是大于1的,需要满足的一个条件是’-前后的符号属…
Bugku 本地管理员
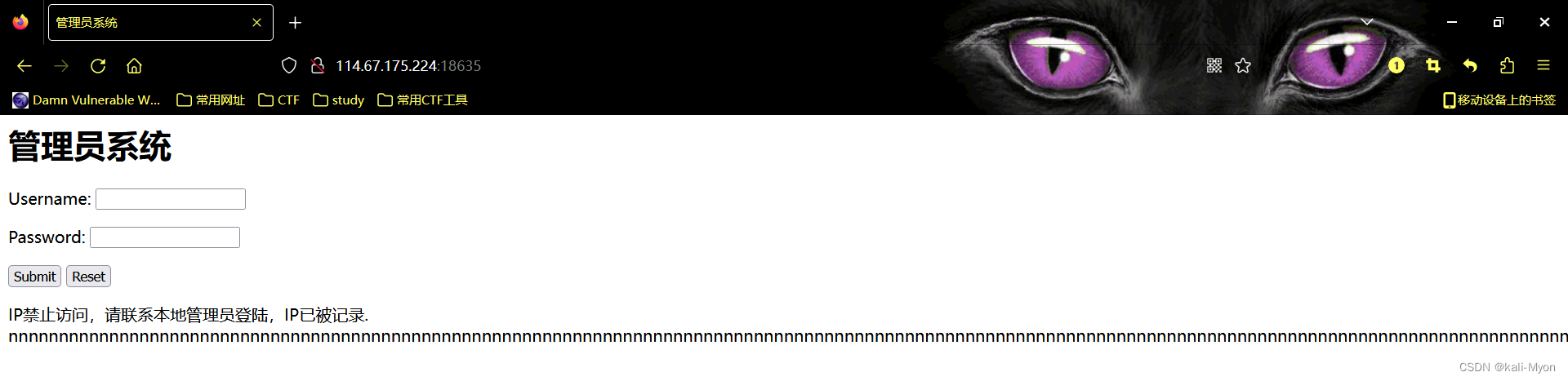
打开链接 F12查看源码,发现了一个base64字符串 解码得到test123,猜测是密码 输入用户admin,密码test123
尝试登录,发现不行 要求似乎只允许本地访问,于是使用bp抓包改包后重发
在请求头加上 x-forwarded-for: 127.0…
Unity中影响性能的因素
原文链接:https://blog.csdn.net/Mq110m/article/details/130435557
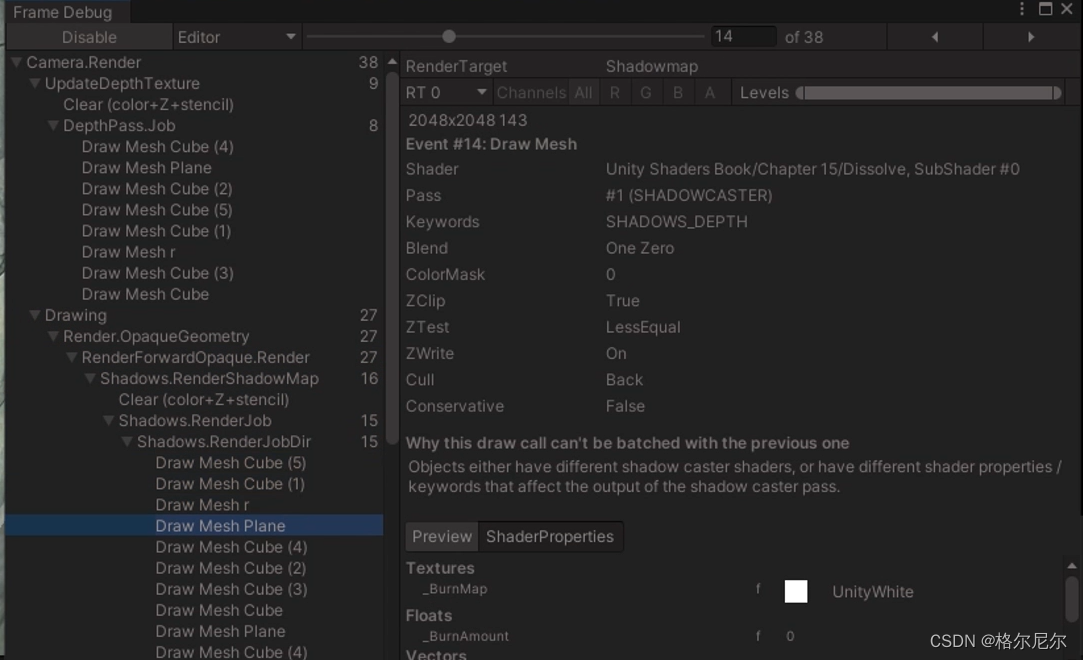
Unity中的渲染优化
移动平台的特点
PC平台相比,移动平台上的GPU架构有很大的不同。由于处理资源等条件的限制,移动设备上的GPU架构专注于尽可能使用更小的带宽和功能&am…

【高数+复变函数】Laplace变换的性质
文章目录 【高数复变函数】Laplace变换的性质一、性质1. 线性性质2. 微分性质3. 像函数的微分性质4. 积分性质5. 象函数的积分性质6. 位移性质7. 延迟性质 【高数复变函数】Laplace变换的性质
通过上一节【高数复变函数】Laplace变换的学习,我们知道了Laplace的基本…

MySQL】- 04 MVCC实现原理
MVCC的实现原理 隐式字段undo日志Read View(读视图)整体流程例子 MVCC的目的就是多版本并发控制,在数据库中的实现,就是为了解决读写冲突,它的实现原理主要是依赖记录中的 3个隐式字段,undo日志 ,Read View 来实现的。…