前言 上一章中我们介绍了NeRF原理、传统体渲染方法以及两者之间的联系,本章中我们将讲解colmap的安装以及使用,部分nerf_pl源码,同时在开发过程中,由于部分操作python/torch不支持,我们需要自己造轮子,且在后续的专栏中我们也会遇到cuda算子,因此本章也会讲解一下cuda算子的使用。
本教程禁止转载。同时,本教程来自知识星球【CV技术指南】更多技术教程,可加入星球学习。
Transformer、目标检测、语义分割交流群
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
CV各大方向专栏与各个部署框架最全教程整理
colmap安装与使用
colmp是一个基于C++的开源计算机视觉库,提供多个工具用于三维重建、图像检索、结构从运动估计、2D/3D特征提取与匹配等任务。它的目标是提供一个功能强大,灵活且易于使用的平台,以促进学术研究、教育和产品开发。Colmap的特点是可以使用CPU或GPU进行计算,支持多种图像格式和相机模型,以及提供了多种数据集导入和导出格式。
由于本专栏主要关注NeRF with pose,因此我们首先需要知道如何获得相机位姿。
1.下载colmap并编译:
colmp源码下载地址,选择最新的版本tag,然后我们根据其document的流程编译即可
网上还有很多其他colmap编译安装教程,因为环境等问题遇到的bug我们这里就不赘述如何解决了
2.使用colmap
其实网上已经有很多colmap的示例教程了,这里我们简要介绍一下colmap gui的使用:
在bash中输入colmap gui,得到gui界面:
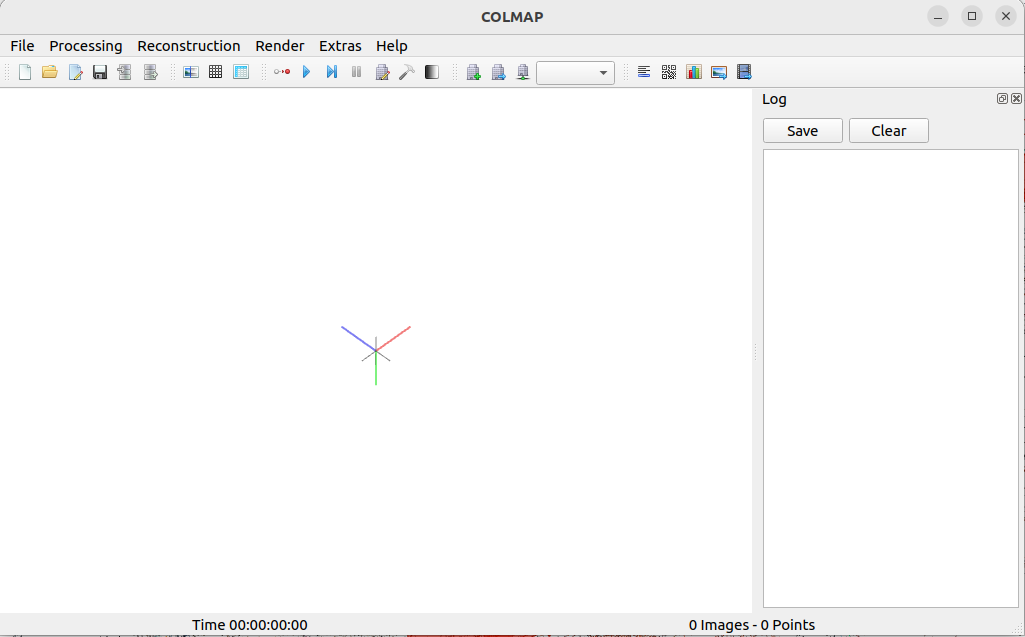
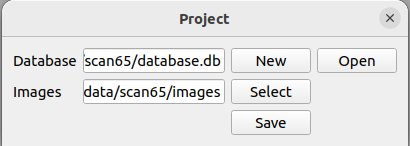
在file中选择new project,在Database中选择New,新建一个database.db(不需要自己手动建,在输入栏中输入database.db可以自动新建);在images栏中选择图像目录(可以有子目录,但图像目录下所有子目录的图片都应该是拍摄同一个场景的),选择save;
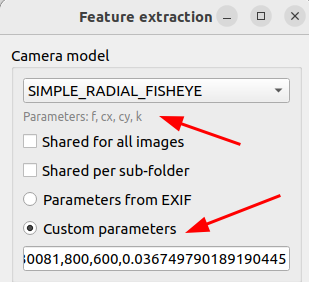
然后选择processing中的feature extraction,如果不知道相机内参,直接点击extract即可,如果有内参,我们可以选择custom parameters,然后依次输入相机的内参(内参表会根据你选择不同的相机模型而不同,一般焦距准确了重建效果不会太差):
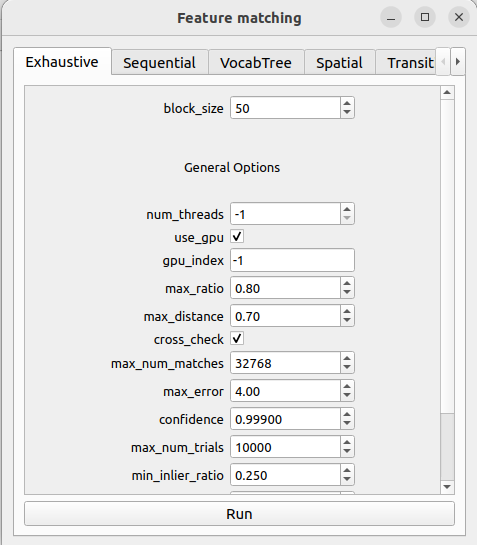
特征提取结束后进入匹配,选择processing中的feature matching,如果有词汇树,可以导入词汇树文件;如果是连续帧,可以选择Sequential并限定相邻帧的数目上限;都不是可以选择Exhaustive,也即暴力匹配(小场景下不会花费多少时间)
匹配后选择Reconstruction中的start reconstruction,即可开始稀疏重建,得到重建结果:
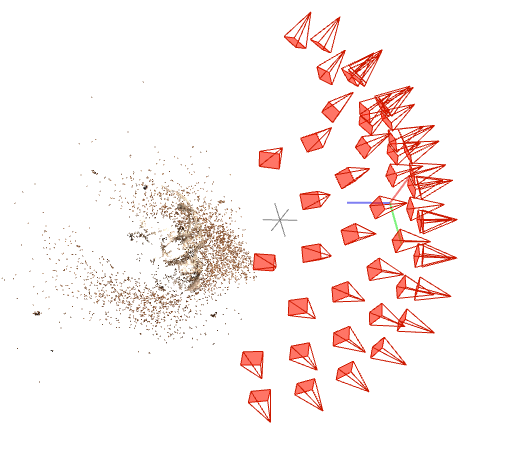
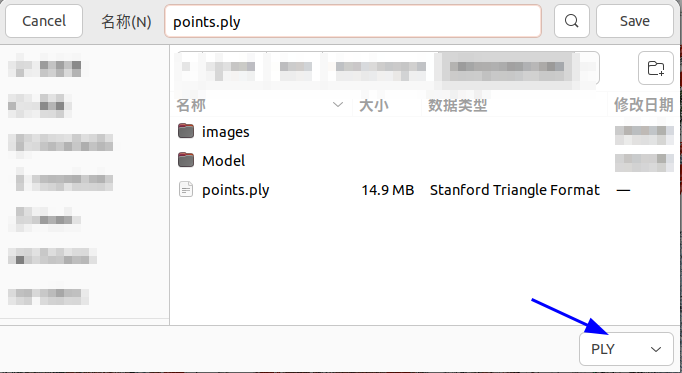
然后我们可以选择files中的export model,我们可以选择将cameras、images、points3D输出为bin或者txt格式,其中cameras中存放的是相机的内参,images中存放了每幅图片的名字、位姿(以四元数方式存储)、特征点描述子,points文件中存放了稀疏点云相关信息(如果想要ply格式,可以选择file中的export model as ...,在右下方选择``PLY```)
cuda算子
由于部分操作在python不支持,或是因为torch/多线程相对于GPU运算更慢,我们有时需要自己写一些cuda算子。例如在nerf类方法中经常用到的ray marhing算法,或者图形学中的aabb intersection检测。但我们的目的不是成为轮子制造者,不需要对每一个能用cuda计算的操作都写一个cuda算子,学习cuda算子仅仅是为了我们实现想法多一种手段;同时我们也不需要深入了解cuda的一些进阶技巧例如数据对齐,使用纹理内存等,仅仅把它当作一个C++实现就好。请注意,这里我们假定读者已经装好了cuda。
1.GPU并行计算原理概述
在CPU单线程计算中,一个线程只能调用一份代码,一份代码只能处理一份数据,这意味着程序的计算能力被限制在一个CPU核心上;当我们不满足单线程的计算能力时,可以利用多个CPU核心来并行运行多个线程处理多份数据;
然而CPU多线程在同一时间段的计算上限只有仅仅几十个线程(这取决于你的内存大小和CPU型号),对比同时期的显卡,计算单元的数目可以相差三四个数量级,例如NVIDIA A2000的计算核心为3328,NVIDA 5000的计算核心为8192,这些计算核心分布在几十个流多处理器(SM,A2000为26,A5000为64)上,每个SM可以同时运行2048个线程。
而在cuda框架中,我们是如何来控制每一个线程的计算的呢?首先我们需要介绍cuda的两个抽象数据结构:block和thread
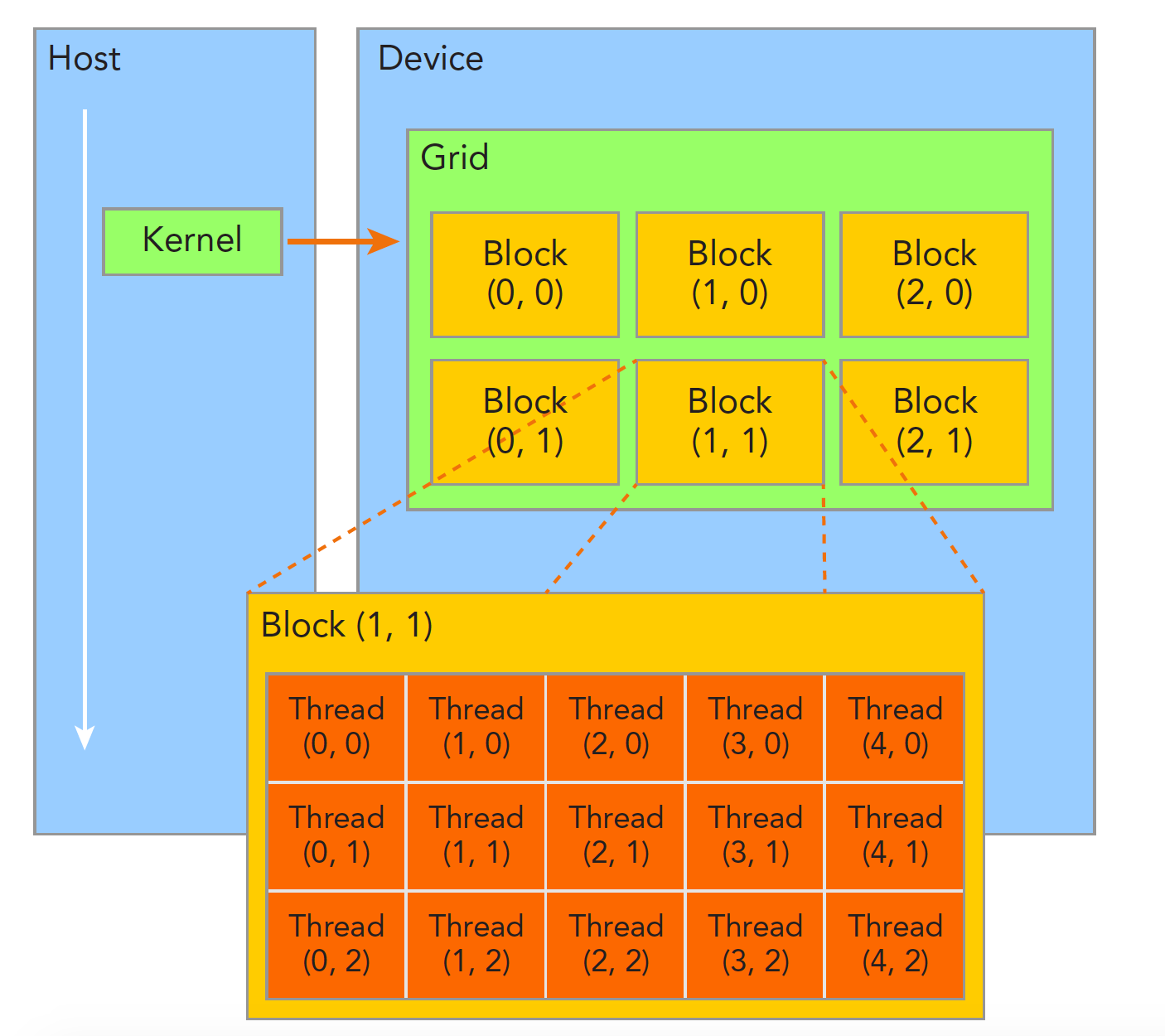
一个函数(kernel函数)可以调控一个Grid的计算资源,每个Grid可以自定义多个block,每个block上可以自定义多个thread(但block和thread并不是这样物理分布在GPU上的,它们仅仅是一种抽象数据结构),每个计算单元可以独立运行这个核函数,同时根据不同__线程的编号__处理不同的数据。例如我们可以建立线程编号到图像像素坐标的一一映射,从而让每个线程单独处理一个像素(例如求这个像素邻域的均值)。
我们可以通过内建变量threadIdx和blockIdx获取当前计算单元所在的block与所在的thread,其中blockIdx与threadIdx都是一个三元组,含有x,y,z成员变量,表示block所在grid的位置与thread所在block的位置(在cv领域,通常情况下我们不会用到z,仅用x,y足以覆盖整幅图像),例如:
// kernel
const int BLOCK_W = 64;
const int BLOCK_H = 16;
const dim3 blockSize(BLOCK_W,BLOCK_H,1);
const dim3 gridSize((num_pixs + BLOCK_W*BLOCK_H - 1)/(BLOCK_W * BLOCK_H),1,1);
// num_pixs = 500 * 300
...
上面的代码中,我们在kernel函数中声明了一个block的大小为
64
×
16
64\times16
64×16,而一个grid包含
500
×
300
+
64
×
16
−
1
64
×
16
≈
147
\frac{500\times300+64\times16-1}{64\times16}\approx147
64×16500×300+64×16−1≈147个block,且这些block沿blockIdx.x方向呈一维线性排列;那么每一个线程的“绝对编号”就可以表示为:
// device
const int32_t n = blockIdx.x*blockDim.x*blockDim.y + threadIdx.x*blockDim.y + threadIdx.y
这里我们可以画一画block与thread的布局,以更好地理解:
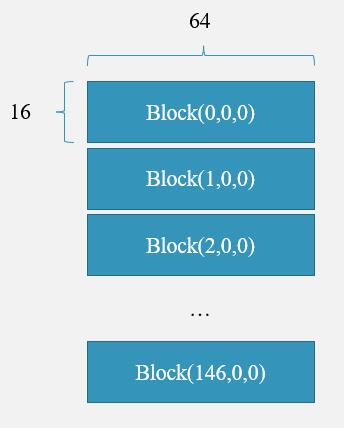

若有一个线程位于Block(2,0,0),且其所在Block(2,0,0)的线程编号为thread(25,16,0),则其编号为__当前block前面所有block的线程数__+所在当前block的线程编号,也即 2 × 16 × 64 + 25 × 16 + 16 = 2464 2\times16\times64+25\times16+16=2464 2×16×64+25×16+16=2464,这个数字表示该线程对应长为 300 × 500 300\times500 300×500向量中的第2465个元素。
想更深入的同学可以参考cuda官方文档。
2.cuda算子和pybinding
正常的cuda程序运行是需要nvcc编译器编译的,若在linux上我们还需要编写繁琐的CMakeLists,所幸我们使用的是pybinding,编译相关的操作我们可以交给python的setuptools库,同时将数据从内存拷贝到GPU上的操作可以用torch实现,我们不用了解cuda相对复杂的memcpy策略;唯一的缺点是不能调试所写的cuda算子。
但为了能够调试,我们后面也会放上c++的项目代码。
3.实例
光是文字描述太过抽象,我们现在实现一个简易的cuda程序:
在大场景的NeRF中,由于网络的学习容量有限,我们需要对场景进行分块;
假设场景被分为了 4 × 4 4\times4 4×4个子区域,每个子区域的子NeRF都需要用观测到这个区域的图像进行训练,但一副图像往往观察到不止一个区域,因此对于每一个子区域,我们需要计算所有图片观察到该区域的像素部分,并用mask来标记(例如mega-nerf的做法);
对于一副 m × n m\times n m×n大小的mask图像,其数据类型为bool,虽然这已经是python中最小的数据类型(1字节),但是对于一张高分辨率的图像(例如 5000 × 3000 5000\times3000 5000×3000分辨率),存储这个mask所需的空间为: 5000 × 3000 102 4 2 ≈ 14 \frac{5000\times3000}{1024^2}\approx14 102425000×3000≈14MB,那么假设有1000张图片,所有mask的存储空间约为 14 14 14GB;在大场景NeRF中,对于每一个分块的子NeRF,我们都需要 14 14 14GB的存储空间也就是 14 × 16 = 224 14\times16=224 14×16=224GB,起码这对于笔者来说是不可忍受的,尤其是当我们想要测试不同分块策略的效果时。
那么我们如果将mask图像向量化为一个 15000000 15000000 15000000长度的一维向量,向量的每一个元素是1bit(注意不是byte),那么存储空间就可以由224G缩减为 15000000 × 16 × 1000 8 × 102 4 3 ≈ 28 \frac{15000000\times16\times1000}{8\times1024^3}\approx28 8×1024315000000×16×1000≈28GB,这和1000幅RGB图像大小(大概11GB)在一个数量级。
但若是用python来实现这个过程会变得很慢,即使用上多线程时间也会很长,回顾一下cuda的原理,我们不妨用cuda算子的形式实现这个过程:
3.1 cu算子核心部分
#include <iostream>
#include <torch/extension.h>
#include <ATen/ATen.h>
#include <ATen/TensorAccessor.h>
#include <ATen/cuda/CUDAContext.h>
using namespace std;
__global__ void packbits_u32_kernel(
torch::PackedTensorAccessor32<int32_t,1,torch::RestrictPtrTraits> idx_array,
torch::PackedTensorAccessor64<int64_t,1,torch::RestrictPtrTraits> bits_array
){
// const int32_t n = blockIdx.x * blockDim.x + threadIdx.x;//block为一维时
const int32_t n = blockIdx.x*blockDim.x*blockDim.y + threadIdx.x*blockDim.y + threadIdx.y;//block为二维时
if(n > bits_array.size(0))
return;
int mask_size = 32;
if (n == bits_array.size(0))
mask_size = idx_array.size(0) % 32;
const int64_t flag = 1;
for(int i = 0 ; i < mask_size ; i++){
int32_t hit_pix = idx_array[n*32 + i];
if (hit_pix > 0){
bits_array[n] |= flag << i;
}
}
}
torch::Tensor packbits_u32_cu(
torch::Tensor idx_array,
torch::Tensor bits_array
){
// 每个线程处理32位长数据即32个像素
const int num_pixs = std::ceil(idx_array.size(0)/32);
const int BLOCK_W = 64;
const int BLOCK_H = 16;
const dim3 blockSize(BLOCK_W,BLOCK_H,1);
const dim3 gridSize((num_pixs + BLOCK_W*BLOCK_H - 1)/(BLOCK_W * BLOCK_H),1,1);
AT_DISPATCH_ALL_TYPES(idx_array.type(),"packbits_u32_cu",
([&] {
packbits_u32_kernel<<<gridSize, blockSize>>>(
idx_array.packed_accessor32<int32_t,1,torch::RestrictPtrTraits>(),
bits_array.packed_accessor64<int64_t,1,torch::RestrictPtrTraits>()
);
}));
return bits_array;
}
include中,torch库来自libtorch(这里是cu111版本,可以从这里下载不同版本的libtorch);ATen库是基础张量和数学运算库(属于libtorch的一个子库)
上述代码中,host端函数packbits_u32_cu接收了向量化后的mask图像idx_array,以及一个用于bit化的int64数组bits_array;并规划了该函数所调控grid的block、thread布局;
然后通过AT_DISPATCH_ALL_TYPES将数据传入device端函数packbits_u32_kernel。
AT_DISPATCH_ALL_TYPES用于自动分派不同数据类型的张量到不同的函数中,其需要传入三个参数:数据类型d、函数名和函数参数列表;
[&]是c++中的一种lambda表达式,上述代码中[&]将其后的代码块打包为一个lambda函数,&表示该函数的所有变量以引用的方式传递;
<<< >>>是cuda中用来定义函数执行配置的符号,其左为device端函数,中为grid、block配置,右为参数列表。
而在packbits_u32_kernel中,每个线程截取idx_array的32个元素,并按照位运算赋值给bits_array中一个元素的32位,完成数据的缩减(这里我们采用int64而不是uint32,是因为ATen不支持uint32以及uint64)。
如果读者想了解更多,可以查阅torch的官方文档或直接查阅libtorch的api文档。笔者认为更容易上手的另一个例子是kwea123的三线性插值教程,该作者的cuda extension系列教程也适合大部分新手进一步学习。
那么cuda算子的核心部分已经完成,我们下面介绍如何使用python调用这个算子。
3.2 pybinding
通常我们在跨语言编程时,使用A语言调用B语言程序,需要将B语言的代码先打包为一个动态库。pybinding也不例外,我们首先需要构建完整的cuda源码,然后才能打包为动态库,此时我们的项目至少需要三个文件:头文件、binding.cpp、main.cu:
utils.h头文件:
#include <torch/extension.h>
#define CHECK_CUDA(x) TORCH_CHECK(x.is_cuda(), #x " must be a CUDA tensor")
#define CHECK_CONTIGUOUS(x) TORCH_CHECK(x.is_contiguous(), #x " must be contiguous")
#define CHECK_INPUT(x) CHECK_CUDA(x); CHECK_CONTIGUOUS(x)
torch::Tensor packbits_u32(torch::Tensor idx_array, torch::Tensor bits_array);
torch::Tensor un_packbits_u32(torch::Tensor idx_array, torch::Tensor bits_array);
torch::Tensor packbits_u32_cu(
torch::Tensor idx_array,
torch::Tensor bits_array
);
torch::Tensor un_packbits_u32_cu(
torch::Tensor idx_array,
torch::Tensor bits_array
);
binding.cpp:
#include "utils.h"
torch::Tensor packbits_u32(torch::Tensor idx_array, torch::Tensor bits_array){
CHECK_CUDA(idx_array);
CHECK_CUDA(bits_array);
return packbits_u32_cu(idx_array,bits_array);
}
torch::Tensor un_packbits_u32(torch::Tensor idx_array, torch::Tensor bits_array){
CHECK_CUDA(idx_array);
CHECK_CUDA(bits_array);
return un_packbits_u32_cu(idx_array,bits_array);
}
PYBIND11_MODULE(TORCH_EXTENSION_NAME, m){
m.def("packbits_u32",&packbits_u32);
m.def("un_packbits_u32",&un_packbits_u32);
}
main.cu
#include "utils.h"
#include <thrust/execution_policy.h>
#include <thrust/scan.h>
#include <cmath>
__global__ void packbits_u32_kernel(
torch::PackedTensorAccessor32<int32_t,1,torch::RestrictPtrTraits> idx_array,
torch::PackedTensorAccessor64<int64_t,1,torch::RestrictPtrTraits> bits_array
){
// const int32_t n = blockIdx.x * blockDim.x + threadIdx.x;//一维时
const int32_t n = blockIdx.x*blockDim.x*blockDim.y + threadIdx.x*blockDim.y + threadIdx.y;//二维时
if(n > bits_array.size(0))
return;
int mask_size = 32;
if (n == bits_array.size(0))
mask_size = (idx_array.size(0) % 32) - 1;
const int64_t flag = 1;
for(int i = 0 ; i < mask_size ; i++){
int32_t hit_pix = idx_array[n*32 + i];
if (hit_pix > 0){
bits_array[n] |= flag << i;
}
}
}
torch::Tensor packbits_u32_cu(
torch::Tensor idx_array,
torch::Tensor bits_array
){
// 每个线程处理32位长数据即32个像素
const int num_pixs = std::ceil(idx_array.size(0)/32);
// const int threads = 256, blocks = (num_pixs+threads-1)/threads;
const int BLOCK_W = 64;
const int BLOCK_H = 16;
const dim3 blockSize(BLOCK_W,BLOCK_H,1);
const dim3 gridSize((num_pixs + BLOCK_W*BLOCK_H - 1)/(BLOCK_W * BLOCK_H),1,1);
AT_DISPATCH_ALL_TYPES(idx_array.type(),"packbits_u32_cu",
([&] {
packbits_u32_kernel<<<gridSize, blockSize>>>(
idx_array.packed_accessor32<int32_t,1,torch::RestrictPtrTraits>(),
bits_array.packed_accessor64<int64_t,1,torch::RestrictPtrTraits>()
);
}));
return bits_array;
}
__global__ void un_packbits_u32_kernel(
torch::PackedTensorAccessor32<int32_t,1,torch::RestrictPtrTraits> idx_array,
torch::PackedTensorAccessor64<int64_t,1,torch::RestrictPtrTraits> bits_array
){
// const int32_t n = blockIdx.x * blockDim.x + threadIdx.x;//一维时
const int32_t n = blockIdx.x*blockDim.x*blockDim.y + threadIdx.x*blockDim.y + threadIdx.y;//二维时
if(n > bits_array.size(0))
return;
int mask_size = 32;
if (n == bits_array.size(0))
mask_size = (idx_array.size(0) % 32) - 1;
const int64_t flag = 1;
for(int i = 0 ; i < mask_size ; i++){
if (bits_array[n] & (flag << i)){
idx_array[n*32 + i]++;
}
}
}
torch::Tensor un_packbits_u32_cu(
torch::Tensor idx_array,
torch::Tensor bits_array
){
// 每个线程处理32位长数据即32个像素
const int num_pixs = std::ceil(idx_array.size(0)/32);
const int BLOCK_W = 64;
const int BLOCK_H = 16;
const dim3 blockSize(BLOCK_W,BLOCK_H,1);
const dim3 gridSize((num_pixs + BLOCK_W*BLOCK_H - 1)/(BLOCK_W * BLOCK_H),1,1);
AT_DISPATCH_ALL_TYPES(idx_array.type(),"un_packbits_u32_cu",
([&] {
un_packbits_u32_kernel<<<gridSize, blockSize>>>(
idx_array.packed_accessor32<int32_t,1,torch::RestrictPtrTraits>(),
bits_array.packed_accessor64<int64_t,1,torch::RestrictPtrTraits>()
);
}));
return idx_array;
}
文件结构为:
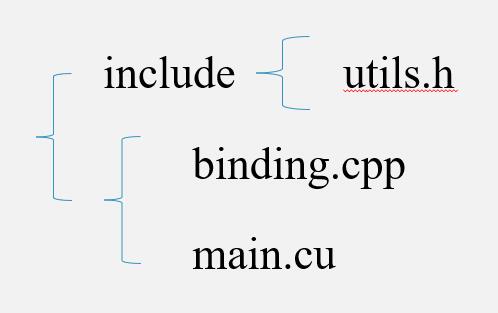
其中binding.cpp将建立cuda函数与python函数的接口,接下来我们将整个项目打包为python的一个package,名为PackBit:
setup.py
import glob
import os.path as osp
from setuptools import setup
from torch.utils.cpp_extension import CUDAExtension, BuildExtension
ROOT_DIR = osp.dirname(osp.abspath(__file__))
include_dirs = [osp.join(ROOT_DIR, "include")]
sources = glob.glob('*.cpp')+glob.glob('*.cu')
setup(
name='PackBit',
version='1.0',
author='will'
ext_modules=[
CUDAExtension(
name='PackBit',
sources=sources,
include_dirs=include_dirs,
extra_compile_args={'cxx': ['-O2'],
'nvcc': ['-O2']}
)
],
cmdclass={
'build_ext': BuildExtension
}
)
由于我们跳过了CMakeLists.txt这一步,在编译cuda程序时不方便链接其他第三方库,这时我们可以在ext_modules添加参数library_dirs和libraries来额外指定所要链接的动态库,例如:
setup(
name='PackBit',
version='1.0',
author='will',
ext_modules=[
CUDAExtension(
name='PackBit',
sources=sources,
include_dirs=include_dirs,
library_dirs=["/home/will/Downloads/libtorch/libtorch/lib","/usr/local/cuda-11.6/lib64"],
libraries =["c10","torch_python","torch"],
extra_compile_args={'cxx': ['-O2'],
'nvcc': ['-O2']},
extra_link_args=["-Wl,-rpath=/home/will/Downloads/libtorch/libtorch/lib"]
)
],
cmdclass={#告诉编译器需要build
'build_ext': BuildExtension
}
)
将setup.py与main.cu和binding.cpp放在同一目录下,在bash中进入该目录,输入python setup.py install指令即可将该cuda程序编译并安装。
最后我们简单测试一下(需要注意,由于我们自己编写的studio库是基于torch库实现的,因此需要先import torch):
test.py
import torch
import studio
import numpy as np
import math
if __name__ == "__main__":
# 测试packbits
a = torch.randint(2,(5463*3460,),dtype = torch.int32).cuda()
b = torch.zeros([math.floor(5463*3460/32)],dtype = torch.int64).cuda()
c=studio.packbits_u32(a,b)
print('a前32位元素:',a[0:32])
print('b[0]:',b[0])
bin_str = "".format(b[0], 'b')
print('b[0]的二进制形式:',np.binary_repr(b[0]).zfill(32))
# 测试unpackbits
# a = torch.zeros([5463*3460],dtype = torch.int32).cuda()
# b = torch.randint(2**32,(math.floor(5463*3460/32),),dtype = torch.int64).cuda()
# c=studio.un_packbits_u32(a,b)
# print('b[0]:',b[0])
# print('将b[0]解码后得到的向量',a[0:32])
# bin_str = "".format(b[0], 'b')
# print('b[0]的二进制形式:',np.binary_repr(b[0]).zfill(32))
测试结果:


3.3 debug
之前我们提到了cu算子with pybinding的方式不方便调试,想要调试只能另起一个C++项目,这里我们放上CMakeLists.txt文件以及main.cu
CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(test)
find_package(PythonInterp REQUIRED)
find_package(CUDA REQUIRED)
# find_package(OpenCV)
find_package(Python3 COMPONENTS Interpreter Development REQUIRED)
find_package(Torch REQUIRED)
set(CMAKE_BUILD_TYPE DEBUG)
set(CMAKE_CUDA_COMPILER /usr/local/cuda-11.6/bin/nvcc)
set(CUDACXX /usr/local/cuda-11.6/bin/nvcc)
set(CMAKE_CXX_STANDARD 14)
set(Torch_DIR /home/will/Downloads/libtorch/libtorch/share/cmake/Torch)#使用torch库必须
set(CUDA_INCLUDE_DIRS "/usr/local/cuda/include")
include_directories(${PYTHON_INCLUDE_DIR})
include_directories(
./include
/usr/include/python3.10
# /usr/local/include/opencv4
${CUDA_INCLUDE_DIRS}
)
set(LIBRARIES
# opencv_features2d
# opencv_calib3d
# opencv_flann
# opencv_highgui
# opencv_imgcodecs
# opencv_imgproc
# opencv_core
)
set(SRC_LIST ./main.cu)
add_executable(demo ${SRC_LIST})#将源文件变为可执行文件
target_link_libraries(demo "${TORCH_LIBRARIES}")#使用torch库必须
target_link_libraries(demo ${LIBRARIES})#将静态/动态库链接到可执行文件
main.cu
// #include "utils.h"
#include <torch/extension.h>
#include <iostream>
#include <ATen/ATen.h>
#include <ATen/TensorAccessor.h>
#include <ATen/cuda/CUDAContext.h>
#include <torch/extension.h>
using namespace std;
__global__ void packbits_u32_kernel(
torch::PackedTensorAccessor32<int32_t,1,torch::RestrictPtrTraits> idx_array,
torch::PackedTensorAccessor64<int64_t,1,torch::RestrictPtrTraits> bits_array
){
// const int32_t n = blockIdx.x * blockDim.x + threadIdx.x;//一维时
const int32_t n = blockIdx.x*blockDim.x*blockDim.y + threadIdx.x*blockDim.y + threadIdx.y;//二维时
if(n > bits_array.size(0))
return;
int mask_size = 32;
if (n == bits_array.size(0))
mask_size = idx_array.size(0) % 32;
const int64_t flag = 1;
for(int i = 0 ; i < mask_size ; i++){
int32_t hit_pix = idx_array[n*32 + i];
// printf("asd");
if (hit_pix > 0){
bits_array[n] |= flag << i;
}
}
}
void packbits_u32_cu(
torch::Tensor idx_array,
torch::Tensor bits_array
){
// 每个线程处理32位长数据即32个像素
const int num_pixs = std::ceil(idx_array.size(0)/32);
const int BLOCK_W = 64;
const int BLOCK_H = 16;
const dim3 blockSize(BLOCK_W,BLOCK_H,1);
AT_DISPATCH_ALL_TYPES(idx_array.type(),"packbits_u64_cu",
([&] {
packbits_u64_kernel<<<8, blockSize>>>(
idx_array.packed_accessor32<int32_t,1,torch::RestrictPtrTraits>(),
bits_array.packed_accessor64<int64_t,1,torch::RestrictPtrTraits>()
);
}));
}
int main() {
auto data = torch::randint(0,2,{10000}).to(torch::kInt32);
auto idx = torch::zeros({10}, torch::kInt64);
auto data1 = data.to(torch::kCUDA);
auto idx1 = idx.to(torch::kCUDA);
packbits_u32_cu(data1,idx1);
cudaDeviceSynchronize();
auto modified_tensor = idx1.to(torch::kCPU);
std::cout << idx1 << std::endl;
return 0;
}
关于cuda的gdb调试我们不再介绍了,网上已有很多相关资料,可以参考cuda-gdb的官方文档
关于pybinding的c++配置,更详细的教程可以参考官方文档。
nerf_pl部分源码解读
nerf_pl是kwea123使用torchlightning复现的NeRF版本,相对于原版NeRF而言,代码易读易改,只是需要学习torchlightning,但我们可以结合gpt与官方api文档快速理解上手;接下来我们结合论文讲解一下nerf的网络结构和训练流程具体是怎样的。
该项目的主体在笔者看来主要包含三部分:模型、生成射线、渲染,项目的环境配置参考仓库的README即可。
1.模型部分
nerf的网络结构在models/nerf.py中:
class NeRF(nn.Module):
def __init__(self,
D=8, W=256,
in_channels_xyz=63, in_channels_dir=27,
skips=[4]):
super(NeRF, self).__init__()
self.D = D
self.W = W
self.in_channels_xyz = in_channels_xyz
self.in_channels_dir = in_channels_dir
self.skips = skips
# xyz encoding layers
for i in range(D):
if i == 0:
layer = nn.Linear(in_channels_xyz, W)
elif i in skips:
layer = nn.Linear(W+in_channels_xyz, W)
else:
layer = nn.Linear(W, W)
layer = nn.Sequential(layer, nn.ReLU(True))
setattr(self, f"xyz_encoding_{i+1}", layer)
self.xyz_encoding_final = nn.Linear(W, W)
# direction encoding layers
self.dir_encoding = nn.Sequential(
nn.Linear(W+in_channels_dir, W//2),
nn.ReLU(True))
# output layers
self.sigma = nn.Linear(W, 1)
self.rgb = nn.Sequential(
nn.Linear(W//2, 3),
nn.Sigmoid())
def forward(self, x, sigma_only=False):
if not sigma_only:
input_xyz, input_dir = \
torch.split(x, [self.in_channels_xyz, self.in_channels_dir], dim=-1)
else:
input_xyz = x
xyz_ = input_xyz
for i in range(self.D):
if i in self.skips:
xyz_ = torch.cat([input_xyz, xyz_], -1)
xyz_ = getattr(self, f"xyz_encoding_{i+1}")(xyz_)
sigma = self.sigma(xyz_)
if sigma_only:
return sigma
xyz_encoding_final = self.xyz_encoding_final(xyz_)
dir_encoding_input = torch.cat([xyz_encoding_final, input_dir], -1)
dir_encoding = self.dir_encoding(dir_encoding_input)
rgb = self.rgb(dir_encoding)
out = torch.cat([rgb, sigma], -1)
return out
我们可以看到整个网络其实很简单,NeRF类的网络结构包含一个
8
×
256
8\times256
8×256的MLP用于输出体密度与特征向量xyz_encoding_final,和一个一层MLP用于输出颜色,如下所示,其中embedding为:
γ
(
p
)
=
(
s
i
n
(
2
0
π
p
)
,
c
o
s
(
2
0
π
p
)
,
.
.
.
,
s
i
n
(
2
L
−
1
π
p
)
,
c
o
s
(
2
L
−
1
π
p
)
)
\gamma(p)=(sin(2^0\pi p),cos(2^0\pi p),...,sin(2^{L-1}\pi p),cos(2^{L-1}\pi p))
γ(p)=(sin(20πp),cos(20πp),...,sin(2L−1πp),cos(2L−1πp))
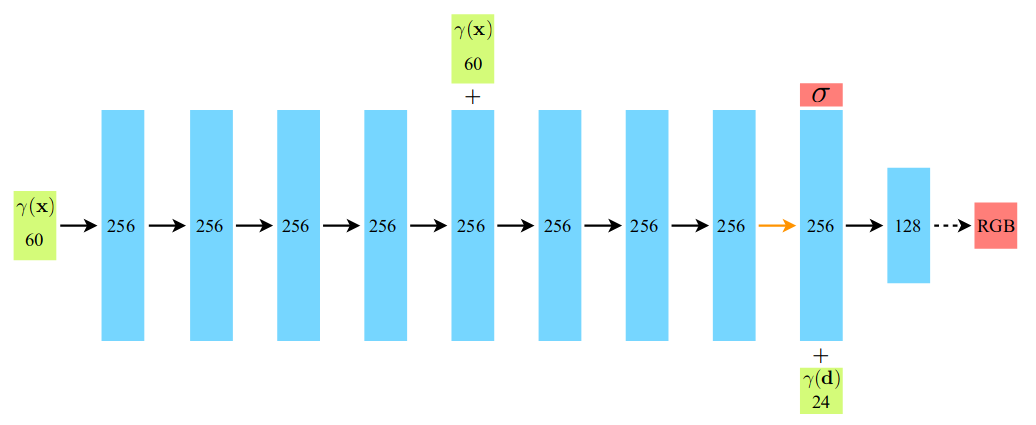
整个网络的输入是三维点数组x
∈
R
N
×
3
\in R^{N\times3}
∈RN×3和观察到这些三维点的方向数组d
∈
R
N
×
3
\in R^{N\times3}
∈RN×3;输出对应的rgb值rgb
∈
R
N
×
3
\in R^{N\times3}
∈RN×3与体密度值sigma
∈
R
N
\in R^{N}
∈RN
2.生成射线
生成射线的主体代码在datasets/ray_utils.py中,在get_rays函数中,输入参数directions表示在相机坐标系下,从相机光心到像素平面上个像素点的方向向量;c2w
=
[
R
∣
t
]
=[R|t]
=[R∣t]表示由相机坐标系变换到世界坐标系下的变换矩阵:
def get_rays(directions, c2w):
# Rotate ray directions from camera coordinate to the world coordinate
rays_d = directions @ c2w[:, :3].T # (H, W, 3)
rays_d = rays_d / torch.norm(rays_d, dim=-1, keepdim=True)
# The origin of all rays is the camera origin in world coordinate
rays_o = c2w[:, 3].expand(rays_d.shape) # (H, W, 3)
rays_d = rays_d.view(-1, 3)
rays_o = rays_o.view(-1, 3)
return rays_o, rays_d
在该函数中,我们将相机坐标系下的方向向量directions通过c2w变换到世界坐标系下,就可以得到相机实际在真实空间下的视线:
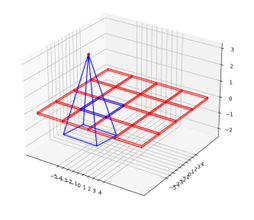
需要注意的是,该变换矩阵可以看作一个线性变换,在不同的基下,变换矩阵也是不同的,具体参照如下形式(其中BDF表示 x , y , z x,y,z x,y,z分别为右下前,BRU表示后右上):
因此在llff以及blender数据集(这两个数据集的坐标系都是下右后)构造direction时:
directions = \
torch.stack([(i-W/2)/focal, -(j-H/2)/focal, -torch.ones_like(i)], -1) # (H, W, 3)
而在使用colmap制作的数据集中,我们需要这样构造directions:
directions = \
torch.stack([(u-cx+0.5)/fx, (v-cy+0.5)/fy, torch.ones_like(u)], -1)
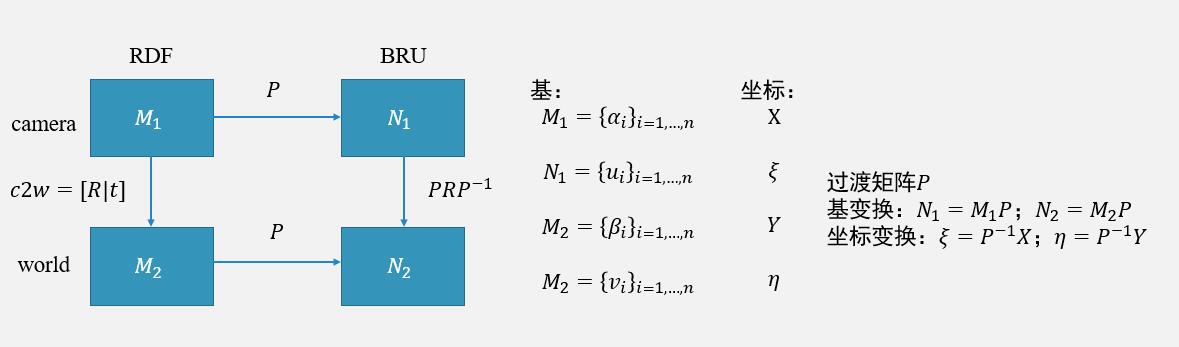
当然我们也可以直接使用过渡矩阵对c2w进行相似变换,这与下图中的操作是等价的:
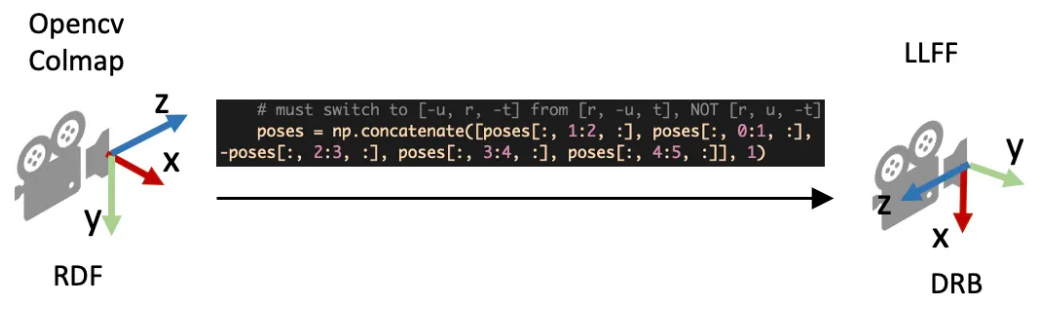
(上图来自博客)
总之,我们在使用c2w的时候,一定要先弄清楚c2w是哪个坐标系到哪个坐标系的变换。
3.渲染部分
nerf_pl渲染的主体在models/rendering.py中,这一部分比较复杂,但总体可以分为粗糙阶段采样,精细阶段采样。
其中inference函数代表一次前向过程,即,将(x,d)送入模型,输出对应的rgb与sigma,这个函数易于理解,对照我们在上一章中讲过的NeRF原理即可理解。nerf_pl将这个过程抽象出来有利于更简便地实现粗糙前向和精细前向:
粗糙前向:
rgb_coarse, depth_coarse, weights_coarse = \
inference(model_coarse, embedding_xyz, xyz_coarse_sampled, rays_d,
dir_embedded, z_vals, weights_only=False)
result = {'rgb_coarse': rgb_coarse,
'depth_coarse': depth_coarse,
'opacity_coarse': weights_coarse.sum(1)
}
精细前向:
rgb_fine, depth_fine, weights_fine = \
inference(model_fine, embedding_xyz, xyz_fine_sampled, rays_d,
dir_embedded, z_vals, weights_only=False)
result['rgb_fine'] = rgb_fine
result['depth_fine'] = depth_fine
result['opacity_fine'] = weights_fine.sum(1)
在粗糙前向结束后,我们会得到体渲染公式中的权重(在我们上一章中有详细介绍),通过sample_pdf
函数计算更准确的采样点位置,然后再将均匀采样点与精细采样点,一起送入精细前向进行体渲染。
4.训练过程
由于作者采用了torchlightning框架,大部分初学者在阅读其train.py时会比较懵,我们先给出一个pytorch_lightning.LightningModule在fit时,各个成员函数的执行顺序:
prepare_data():该函数用于在开始训练之前加载数据集。它只会在单个进程中调用一次,通常在初始化训练模型之前调用。
setup():该函数用于初始化模型和数据集。它在 prepare_data() 函数之后被调用,并在训练过程之前被调用。
train_dataloader():该函数返回训练数据的数据加载器,它在 setup() 函数之后被调用。
val_dataloader():该函数返回验证数据的数据加载器,它在 train_dataloader() 函数之后被调用。
test_dataloader():该函数返回测试数据的数据加载器,它在 val_dataloader() 函数之后被调用。
forward():该函数用于定义模型的前向传递过程,在训练和推理过程中被调用。
training_step():该函数在每个训练批次(batch)中被调用,用于计算损失并执行反向传播。
validation_step():该函数在每个验证批次(batch)中被调用,用于评估模型在验证集上的性能。
test_step():该函数在每个测试批次(batch)中被调用,用于评估模型在测试集上的性能。
training_epoch_end():该函数在每个训练轮次(epoch)结束时被调用,用于处理和汇总训练过程中的统计信息。
validation_epoch_end():该函数在每个验证轮次(epoch)结束时被调用,用于处理和汇总验证过程中的统计信息。
test_epoch_end():该函数在每个测试轮次(epoch)结束时被调用,用于处理和汇总测试过程中的统计信息。
configure_optimizers():该函数用于定义优化器及其超参数,在训练过程之前被调用。
了解了这些成员方法的作用,则我们可以在初读时仅关注forward与training_step:
def training_step(self, batch, batch_nb):
log = {'lr': get_learning_rate(self.optimizer)}
rays, rgbs = self.decode_batch(batch)
results = self(rays)
log['train/loss'] = loss = self.loss(results, rgbs)
typ = 'fine' if 'rgb_fine' in results else 'coarse'
with torch.no_grad():
psnr_ = psnr(results[f'rgb_{typ}'], rgbs)
log['train/psnr'] = psnr_
return {'loss': loss,
'progress_bar': {'train_psnr': psnr_},
'log': log
}
torchlightning在加载完各个数据的dataloader后,会直接进入training_step,同时会传入data_loader中dataset的__getitem__()返回的数据,例如在datasets/blender.py中:
def __getitem__(self, idx):
if self.split == 'train': # use data in the buffers
sample = {'rays': self.all_rays[idx],
'rgbs': self.all_rgbs[idx]}
else: # create data for each image separately
frame = self.meta['frames'][idx]
c2w = torch.FloatTensor(frame['transform_matrix'])[:3, :4]
img = Image.open(os.path.join(self.root_dir, f"{frame['file_path']}.png"))
img = img.resize(self.img_wh, Image.LANCZOS)
img = self.transform(img) # (4, H, W)
valid_mask = (img[-1]>0).flatten() # (H*W) valid color area
img = img.view(4, -1).permute(1, 0) # (H*W, 4) RGBA
img = img[:, :3]*img[:, -1:] + (1-img[:, -1:]) # blend A to RGB
rays_o, rays_d = get_rays(self.directions, c2w)
rays = torch.cat([rays_o, rays_d,
self.near*torch.ones_like(rays_o[:, :1]),
self.far*torch.ones_like(rays_o[:, :1])],
1) # (H*W, 8)
sample = {'rays': rays,
'rgbs': img,
'c2w': c2w,
'valid_mask': valid_mask}
return sample
则在training_step中的输入参数batch即为上述的sample,然后training_step通过
results = self(rays)执行forward,并将前向得到的结果与原始图像rgbs作loss,loss在training_step之后会自动反传,不需要我们进行loss.backward与opt.step()
def forward(self, rays):
"""Do batched inference on rays using chunk."""
B = rays.shape[0]
results = defaultdict(list)
for i in range(0, B, self.hparams.chunk):
rendered_ray_chunks = \
render_rays(self.models,
self.embeddings,
rays[i:i+self.hparams.chunk],
self.hparams.N_samples,
self.hparams.use_disp,
self.hparams.perturb,
self.hparams.noise_std,
self.hparams.N_importance,
self.hparams.chunk, # chunk size is effective in val mode
self.train_dataset.white_back)
for k, v in rendered_ray_chunks.items():
results[k] += [v]
for k, v in results.items():
results[k] = torch.cat(v, 0)
return results
预告
本篇博客简单介绍了colmap的gui使用,cuda算子的原理,以及一个简易例子,最后我们对nerf_pl的大体流程进行了介绍,希望可以帮助读者进一步理解NeRF原理。
下一篇博客我们将会介绍一些开源框架例如sdfstudio、nerfstudio的使用,以及基于occupancy grid和ray marching的加速库nerfacc。
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
【技术文档】《从零搭建pytorch模型教程》122页PDF下载
QQ交流群:470899183。群内有大佬负责解答大家的日常学习、科研、代码问题。
模型部署交流群:732145323。用于计算机视觉方面的模型部署、高性能计算、优化加速、技术学习等方面的交流。
其它文章
ICLR 2023 | RevCol:可逆的多 column 网络,大模型架构设计新范式
CVPR 2023 | 即插即用的注意力模块 HAT: 激活更多有用的像素助力low-level任务显著涨点!
ICML 2023 | 轻量级视觉Transformer (ViT) 的预训练实践手册
即插即用系列 | 高效多尺度注意力模块EMA成为YOLOv5改进的小帮手
即插即用系列 | Meta 新作 MMViT: 基于交叉注意力机制的多尺度和多视角编码神经网络架构
全新YOLO模型YOLOCS来啦 | 面面俱到地改进YOLOv5的Backbone/Neck/Head
ReID专栏(三) 注意力的应用
ReID专栏(二)多尺度设计与应用
ReID专栏(一) 任务与数据集概述
libtorch教程(三)简单模型搭建
libtorch教程(二)张量的常规操作
libtorch教程(一)开发环境搭建:VS+libtorch和Qt+libtorch
异常检测专栏(三)传统的异常检测算法——上
异常检测专栏(二):评价指标及常用数据集
异常检测专栏(一)异常检测概述
【CV技术指南】咱们自己的CV全栈指导班、基础入门班、论文指导班 全面上线!!_
CV最全知识体系和技术教程