1.创建环境+配置环境变量
mkdir -p $HOME/code/
cd $HOME/code/
- Set environment variable `PointNetGPD_FOLDER` in your `$HOME/.bashrc` file.
export PointNetGPD_FOLDER=$HOME/code/PointNetGPD
2.安装
1. Install `pcl-tools` via `sudo apt install pcl-tools`.
2. An example for create a virtual environment: `conda create -n pointnetgpd python=3.10 numpy ipython matplotlib opencv mayavi -c conda-forge`
3. Make sure in your Python environment do not have same package named ```meshpy``` or ```dexnet```.
4. Install PyTorch: https://pytorch.org/get-started/locally/
3.项目
1. Clone this repository:
cd $HOME/code
git clone https://github.com/lianghongzhuo/PointNetGPD.git
2. Install our requirements in `requirements.txt`
cd $PointNetGPD_FOLDER
pip install -r requirements.txt
3. Install our modified meshpy (Modify from [Berkeley Automation Lab: meshpy](https://github.com/BerkeleyAutomation/meshpy))
cd $PointNetGPD_FOLDER/meshpy
python setup.py develop
4. Install our modified dex-net (Modify from [Berkeley Automation Lab: dex-net](https://github.com/BerkeleyAutomation/dex-net))
cd $PointNetGPD_FOLDER/dex-net
python setup.py develop
5. Modify the gripper configurations to your own gripper
vim $PointNetGPD_FOLDER/dex-net/data/grippers/robotiq_85/params.json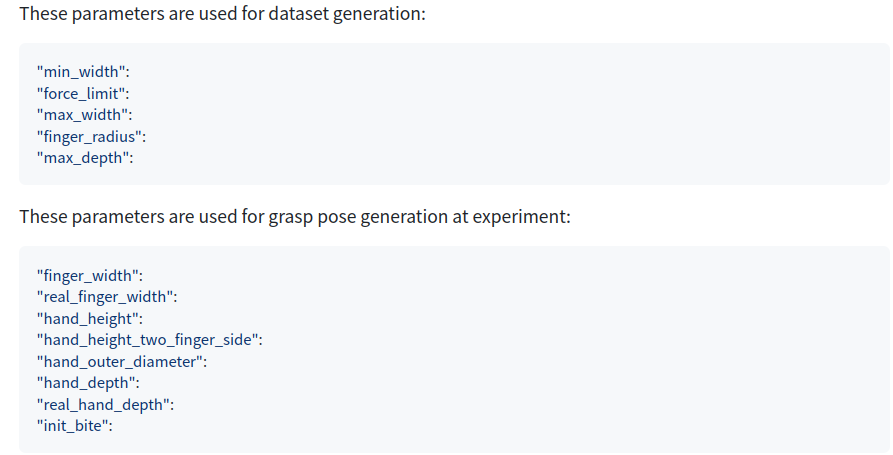
4.数据集
1.下载作者生成好的数据集: https://tams.informatik.uni-hamburg.de/research/datasets/PointNetGPD_grasps_dataset.zip
2.修改文件夹名字为`ycb_grasp`并移动到`$PointNetGPD_FOLDER/PointNetGPD/data/`
4.1 自己生成数据集
1. 下载YCB数据集:(http://ycb-benchmarks.s3-website-us-east-1.amazonaws.com/).
1.1 用命令下载数据集(https://github.com/lianghongzhuo/ycb-tools).
cd $PointNetGPD_FOLDER/data
git clone https://github.com/lianghongzhuo/ycb-tools
cd ycb-tools
python download_ycb_dataset.py rgbd_512
2. 数据集里内容格式:Manage your dataset at: `$PointNetGPD_FOLDER/PointNetGPD/data`
Every object should have a folder, structure like this:
```
├002_master_chef_can
|└── google_512k
| ├── nontextured.obj (generated by pcl-tools)
| ├── nontextured.ply
| ├── nontextured.sdf (generated by SDFGen)
|└── rgbd
| ├── *.jpg
| ├── *.h5
| ├── ...
├003_cracker_box
└004_sugar_box
...
```
3. Install SDFGen from [GitHub](https://github.com/jeffmahler/SDFGen.git):
cd $PointNetGPD_FOLDER
git clone https://github.com/jeffmahler/SDFGen.git
cd SDFGen && mkdir build && cd build && cmake .. && make
4. Install [Open3D](http://www.open3d.org/docs/latest/getting_started.html)
pip install open3d
5. Generate `nontextured.sdf` file and `nontextured.obj` file using `pcl-tools` and `SDFGen` by running:
cd $PointNetGPD_FOLDER/dex-net/apps
python read_file_sdf.py
6. Generate dataset by running the code:
cd $PointNetGPD_FOLDER/dex-net/apps
python generate-dataset-canny.py [prefix]
where `[prefix]` is optional, it will add a prefix on the generated files.
5. 可视化结果
- Visualization grasps可视化抓取
cd $PointNetGPD_FOLDER/dex-net/apps
python read_grasps_from_file.py
Note:
- This file will visualize the grasps in `$PointNetGPD_FOLDER/PointNetGPD/data/ycb_grasp/` folder
- Visualization object normal可视化法线
cd $PointNetGPD_FOLDER/dex-net/apps
python Cal_norm.py
This code will check the norm calculated by `meshpy` and `pcl` library.
6.训练网络Training the network
1. YCB数据准备:
cd $PointNetGPD_FOLDER/PointNetGPD/data
Make sure you have the following files, The links to the dataset directory should add by yourself:
```
├── google2cloud.csv (Transform from google_ycb model to ycb_rgbd model)
├── google2cloud.pkl (Transform from google_ycb model to ycb_rgbd model)
└── ycb_grasp (generated grasps)
```
2.从RGBD图像中生成点云 you may change the number of process running in parallel if you use a shared host with others
cd $PointNetGPD_FOLDER/PointNetGPD
python ycb_cloud_generate.py
Note: Estimated running time at our `Intel(R) Xeon(R) CPU E5-2690 v4 @ 2.60GHz` dual CPU with 56 Threads is 36 hours. Please also remove objects beyond the capacity of the gripper.
7. Run the experiments:
cd $PointNetGPD_FOLDER/PointNetGPD
Launch a tensorboard for monitoring
tensorboard --log-dir ./assets/log --port 8080
and run an experiment for 200 epoch
python main_1v.py --epoch 200 --mode train --batch-size x (x>1)
File name and corresponding experiment:
```
main_1v.py --- 1-viewed point cloud, 2 class——单视角点云+2类
main_1v_mc.py --- 1-viewed point cloud, 3 class——单视角点云+3类
main_1v_gpd.py --- 1-viewed point cloud, GPD——单视角点云+GPD
main_fullv.py --- Full point cloud, 2 class——整个点云+2类
main_fullv_mc.py --- Full point cloud, 3 class——整个点云+3类
main_fullv_gpd.py --- Full point cloud, GPD——整个点云+GPD
```
For GPD experiments, you may change the input channel number by modifying `input_chann` in the experiment scripts(only 3 and 12 channels are available)
8. 使用训练的网络Using the trained network
1. Get UR5 robot state:
Goal of this step is to publish a ROS parameter tell the environment whether the UR5 robot is at home position or not.
cd $PointNetGPD_FOLDER/dex-net/apps
python get_ur5_robot_state.py
2. Run perception code:
This code will take depth camera ROS info as input, and gives a set of good grasp candidates as output.
All the input, output messages are using ROS messages.
cd $PointNetGPD_FOLDER/dex-net/apps
python kinect2grasp.py
arguments:
-h, --help show this help message and exit
--cuda using cuda for get the network result
--gpu GPU set GPU number
--load-model LOAD_MODEL set witch model you want to use (rewrite by model_type, do not use this arg)
--show_final_grasp show final grasp using mayavi, only for debug, not working on multi processing
--tray_grasp not finished grasp type
--using_mp using multi processing to sample grasps
--model_type MODEL_TYPE selet a model type from 3 existing models
```