一,创建bootrom
打开打开Workbench,目录在C:\WindRiver\workbench-3.3\wrwb\platform\x86-win32\eclipse\eclipse-x86-win32
在菜单栏,点击 File->New->Project。The New Project Wizard opens。
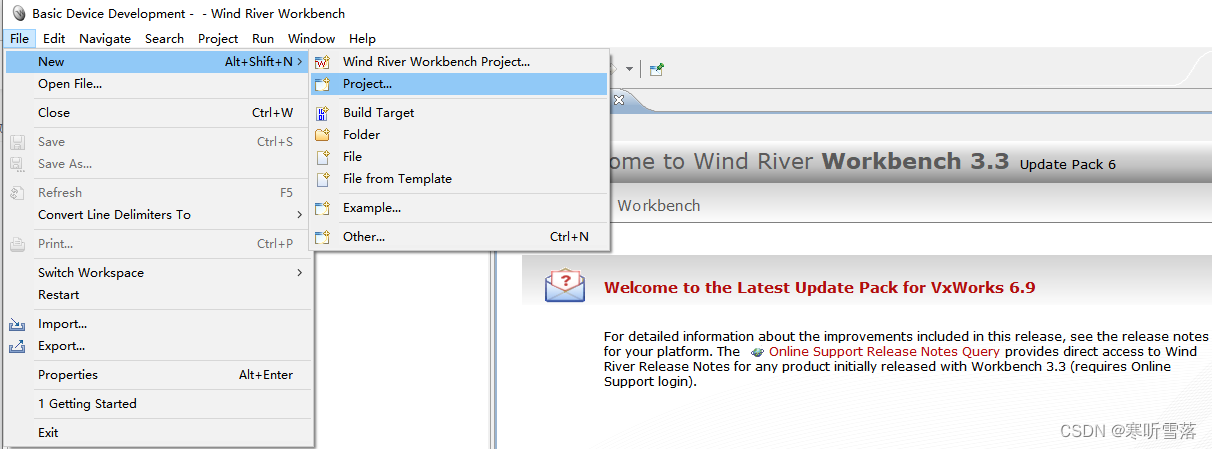
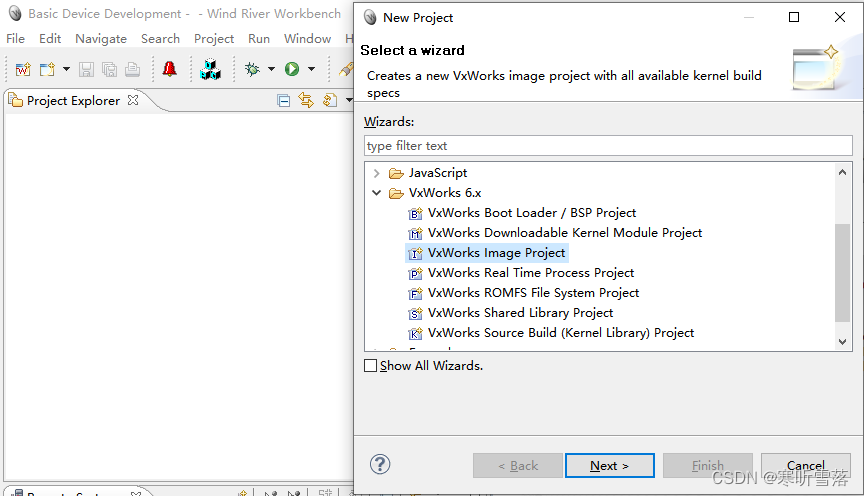
在 VxWorks 6.x中,选择 VxWorks Image Project
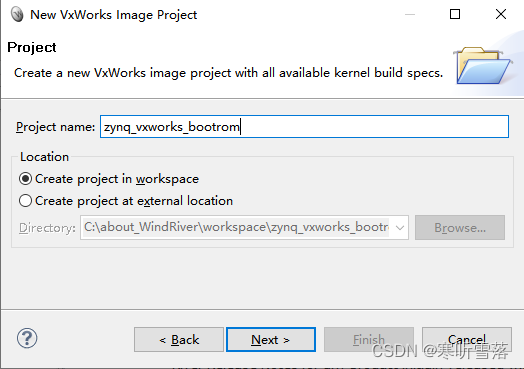
输入project name, 比如zynq_vxworks_bootrom
基于a board support package,选择 xlnx_zynq7k BSP,编译工具链选择diab,勾选Enable WDB Target Agent,选择next下一步,VxWorks Image Project Multipage Wizard就配置完成。

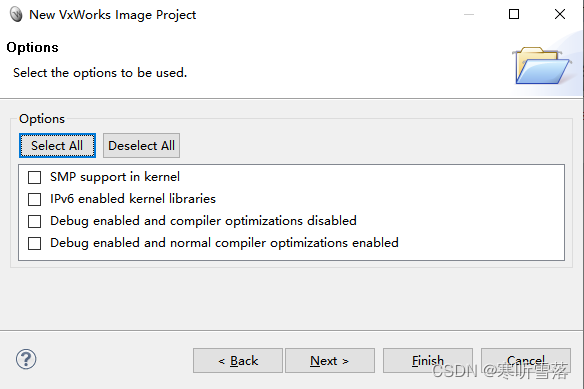
这一步保持默认,直接选择next下一步
从the New VxWorks Image Project中,profile选择PROFILE_DEVELOPMENT,单击finish。

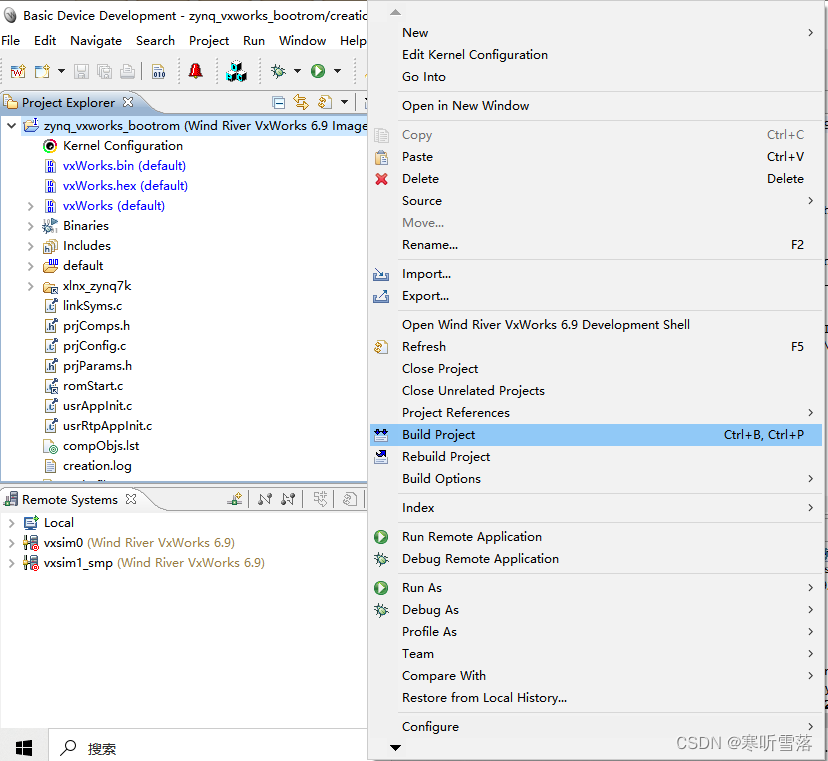
从bootrom工程中右键选择build project,开始编译Kernel image。
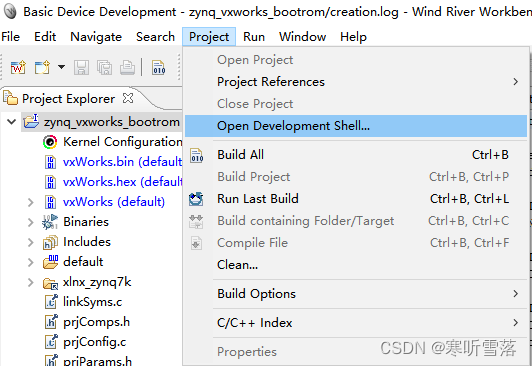
菜单栏,project中选择open development shell打开vxworks脚本编译窗口
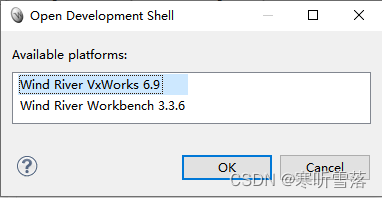
选择Wind River VxWorks 6.9,然后单击OK
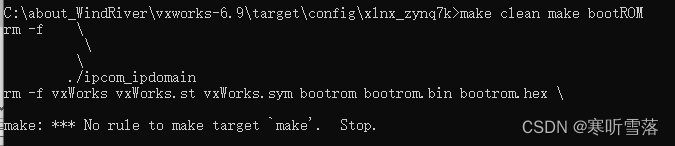
进入cd vxworks-6.9\target\config\xlnx_zynq7k\

输入make clean make zynq_vxworks_bootrom,就会生成zynq_vxworks_bootrom.elf文件
二,根据vivado的搭建修改对bootrom的硬件配置
1,vivado中勾选的硬件有一路PS串口,用于启动文件信息打印,现在修改vxworks串口BSP

(1)config.h文件中,修改串口打印波特率和串口的数量,如果有三路修改为3,两路修改为2,一路修改为1,这里我修改为1。修改目录宏定义在xlnx_zynq7k.h,如下截图所示。
#undef CONSOLE_BAUD_RATE
#define CONSOLE_BAUD_RATE 115200
#undef NUM_TTY
#define NUM_TTY N_SIO_CHANNELS
(2)在prjParams.h文件中,此宏表示bootrom生成的BOOT.BIN启动后从哪路串口进行打印,此处我配置为1,如果需要从第1路串口打印则需要将此宏定义为1,第2路串口打印需要将宏定义配置为2。
#undef CONSOLE_TTY
#define CONSOLE_TTY 1(3)在hwconf.c文件中,对驱动列表中的中断输入中的串口驱动的修改。
LOCAL struct intrCtlrInputs gicInputs[] = {
/* pin, driver, unit, index */
{ INT_VEC_UART1, "zynqSioDev", 0, 0 },2,两路网口分别连接PS和PL,连接PL的网口使用GMII转RGMII的方式
 3,分别勾选SD卡和EMMC硬件配置
3,分别勾选SD卡和EMMC硬件配置

(1)如果采用SD卡启动,这里需要修改SD卡驱动,增加SD卡控制器驱动组件和文件系统组件。在config.h文件中,增加SD卡控制器驱动组件和文件系统组件。
/* SDHC */
#define DRV_STORAGE_SDHC
#define DRV_SDSTORAGE_CARD
#define INCLUDE_BOOT_FILESYSTEMS
/* dosfs */
#define INCLUDE_DOSFS
#define INCLUDE_DOSFS_MAIN
#define INCLUDE_DOSFS_CHKDSK
#define INCLUDE_DOSFS_FMT
#define INCLUDE_DOSFS_FAT
#define INCLUDE_DOSFS_SHOW
#define INCLUDE_DOSFS_DIR_VFAT
#define INCLUDE_DOSFS_DIR_FIXED
#define INCLUDE_FS_MONITOR
#define INCLUDE_FS_EVENT_UTIL
#define INCLUDE_ERF
#define INCLUDE_XBD
#define INCLUDE_XBD_TRANS
#define INCLUDE_DEVICE_MANAGER
#define INCLUDE_XBD_BLK_DEV
#define INCLUDE_XBD_PART_LIB
#define INCLUDE_DISK_UTIL(2)如果采用EMMC启动,这里需要增加EMMC驱动配置
修改EMMC驱动,EMMC驱动和SD卡驱动是互斥的,根据硬件进行相应地配置,如果包含了SD卡驱动,就不需要EMMC驱动。如果包含了EMMC驱动,则不需要再包含SD卡驱动。此处我以一路EMMC配置为例,由于默认的BSP中有两路EMMC配置,此处我们保留EMMC0,屏蔽EMMC1。
在文件config.h中,增加EMMC控制器驱动组件和文件系统组件
#define DRV_ZYNQ_SDHC_CTRL
#define DRV_MMCSTORAGE_CARD
#define INCLUDE_DISK_UTIL
#define INCLUDE_DOSFS
#define INCLUDE_BOOT_FILESYSTEMS
#define INCLUDE_XBD_BLK_DEV
#define INCLUDE_XBD_PART_LIB
#define INCLUDE_XBD_RAMDRV在hwconf.c文件中,保留EMMC0的配置,删除EMMC1的中断优先级配置
#ifdef DRV_ZYNQ_SDHC_CTRL
{ INT_VEC_SDIO0, 128 },
#endif /* DRV_ZYNQ_SDHC_CTRL */保留EMMC0的中断配置,删除EMMC1的中断触发配置
#ifdef DRV_ZYNQ_SDHC_CTRL
{ INT_VEC_SDIO0, VXB_INTR_TRIG_LEVEL },
#endif /* DRV_ZYNQ_SDHC_CTRL */在中断输入中保留EMMC0,屏蔽EMMC1
#ifdef DRV_ZYNQ_SDHC_CTRL
{ INT_VEC_SDIO0, "zynqSdhci", 0, 0 },
#endif /* DRV_ZYNQ_SDHC_CTRL */保留EMMC0驱动模块,屏蔽EMMC1驱动模块
#ifdef DRV_ZYNQ_SDHC_CTRL
LOCAL struct hcfResource zynqSdhc0Resources[] = {
{ "regBase", HCF_RES_INT, {(void *)ZYNQ7K_SDHC0_BASE} },
{ "clkFreq", HCF_RES_ADDR, {(void *)sysSdhcClkFreqGet} },
{ "polling", HCF_RES_INT, {(void *)FALSE} },
{ "flags", HCF_RES_INT, {(void *)(SDHC_PIO_NEED_DELAY |
SDHC_MISS_CARD_INS_INT_WHEN_INIT |
SDHC_FIFO_ENDIANESS_REVERSE |
SDHC_HOST_VER_REVERSE) } }
};
#define zynqSdhc0Num NELEMENTS(zynqSdhc0Resources)
#endif /* DRV_ZYNQ_SDHC_CTRL */在驱动列表中保留EMMC0,屏蔽EMMC1
#ifdef DRV_ZYNQ_SDHC_CTRL
{ "zynqSdhci", 0, VXB_BUSID_PLB, 0, zynqSdhc0Num, zynqSdhc0Resources },
#endif /* DRV_ZYNQ_SDHC_CTRL */在sysLib.c文件中,屏蔽的EMMC1控制器的寄存器地址映射,保留EMMC0控制器的寄存器地址映射内容。
#if defined(DRV_STORAGE_SDHC) || defined(DRV_ZYNQ_SDHC_CTRL)
{
ZYNQ7K_SDHC0_BASE, /* SDIO */
ZYNQ7K_SDHC0_BASE,
SZ_4K,
MMU_ATTR_VALID_MSK | MMU_ATTR_PROT_MSK | MMU_ATTR_DEVICE_SHARED_MSK,
MMU_ATTR_VALID | MMU_ATTR_SUP_RWX | MMU_ATTR_DEVICE_SHARED
},
/*
{
ZYNQ7K_SDHC1_BASE, /* SDIO */
ZYNQ7K_SDHC1_BASE,
SZ_4K,
MMU_ATTR_VALID_MSK | MMU_ATTR_PROT_MSK | MMU_ATTR_DEVICE_SHARED_MSK,
MMU_ATTR_VALID | MMU_ATTR_SUP_RWX | MMU_ATTR_DEVICE_SHARED
},
*/
#endif /* DRV_STORAGE_SDHC || DRV_ZYNQ_SDHC_CTRL */4,勾选flash硬件配置,为后续flash启动固化做准备

(1)添加TFFS文件系统组件。
#define INCLUDE_TFFS(2)在config.h文件中,修改spi总线类型,默认为4BIT,由于我此处硬件设计为两片flash,所以修改为8BIT,如果只有一片flash可以不用修改
# define SPI_BUS_TYPE SPI_SINGLE_8BIT(3) 由于硬件上有两片16M大小的flash,所以将16M修改为32M。
# define SPI_FLASH_SIZE (SZ_32M)5,修改默认boot启动参数
gem(0,0)表示从网口0启动vxWorks镜像,host表示主机名称,vxWorks.st表示vxWorks系统镜像名称,h表示主机ip地址,e表示板卡ip地址,g表示网关地址,u表示ftp用户名,pw表示ftp密码,f表示bootom启动时的特殊标志,tn表示板卡名称。
#define DEFAULT_BOOT_LINE \
"gem(0,0)host:vxWorks h=192.168.1.36 e=192.168.1.50:ffffff00 \
g=192.168.1.1 u=vxWorks pw=vxWorks f=0x0 tn=xlnx_zynq7k"三,在SDK生成zynq_fsbl.elf文件
创建一个BOOT.BIN需要生成[bootloader]zynq_fsbl.elf和bootROM.elf来合成
打开SDK,菜单栏中New选择Application Project
输入fsbl文件名,点击next下一步
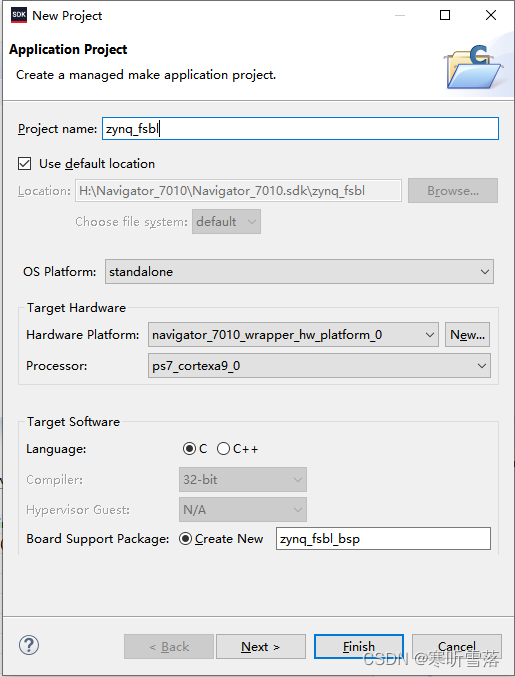
选择zynq fsbl,点击完成。生成后,点击zynq_fsbl工程右键,build project生成elf文件

四,生成wxworks系统BOOT.BIN启动文件
菜单栏Xilinx,选择Creat Boot Image创建启动文件
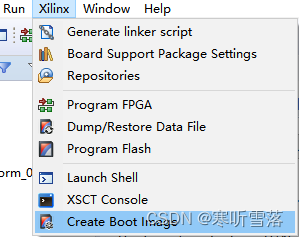
生成BOOT.BIN启动文件

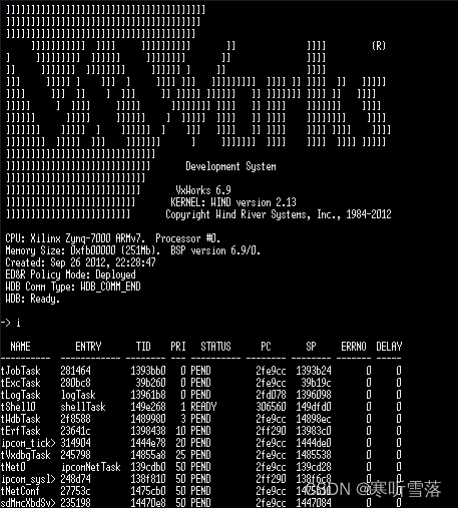
启动wxworks系统打印信息
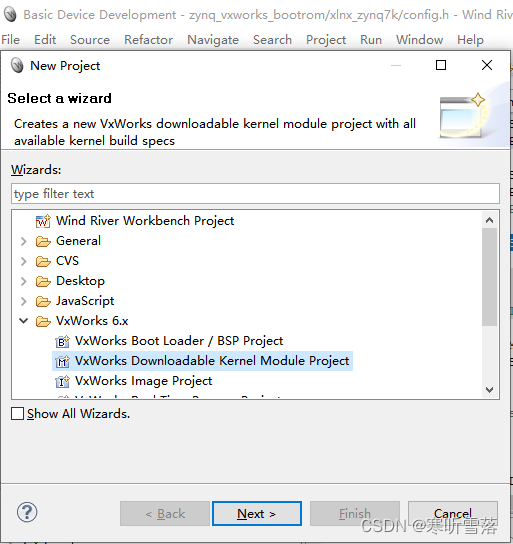
五,创建wxworks应用程序
选择File > New > Project > VxWorks Downloadable Kernel Module Project,点击next下一步。
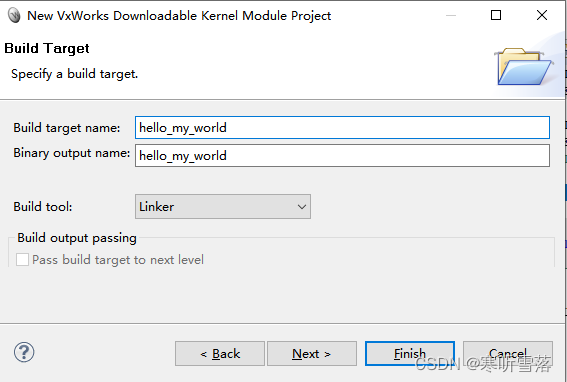
输入一个 project name,比如hello_my_world

连续点击下一步
点击下一步

点击finish完成
右键选择New > File,新建一个应用程序
 取名hello_world.c,点击hello_my_world,然后finish完成
取名hello_world.c,点击hello_my_world,然后finish完成

加入应用程序代码
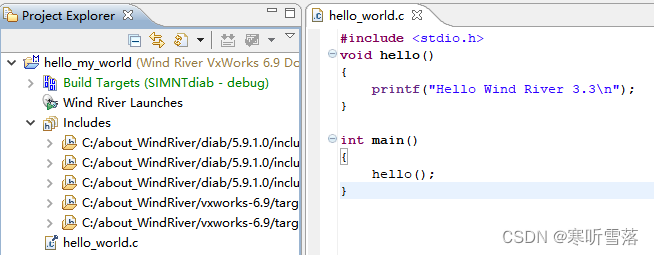
wxworks应用程序举例
#include <sys/mman.h>
#define GPIO_BASE 0xE000A000
#define GPIO_DIRM_0 0x00000204
#define GPIO_OEN_0 0x00000208
#define GPIO_DATA_0 0x00000040
int main(void)
{
printf("Hello World!\n");
int val = 0xffffffff;
sysOutLong(GPIO_BASE + GPIO_DIRM_0, 0x00000400);
sysOutLong(GPIO_BASE + GPIO_OEN_0, 0x00000400);
while (1)
{
sysOutLong(GPIO_BASE + GPIO_DATA_0, val);
sleep(1);
val ^= 0xffffffff;
}
return 0;
}