目录
人体姿态估计的介绍与应用
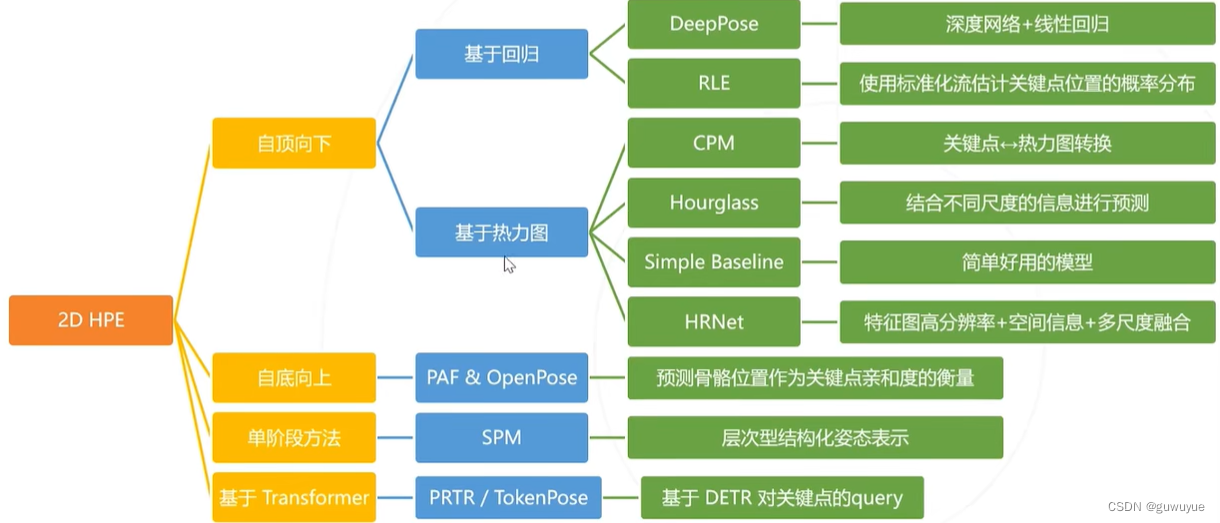
2D姿态估计
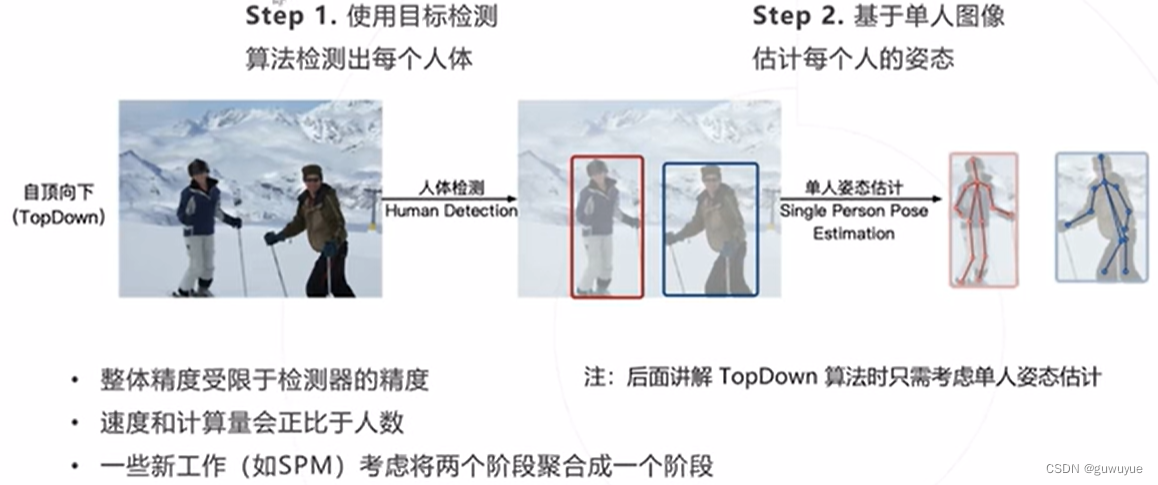
多人姿态估计:自顶向下方法
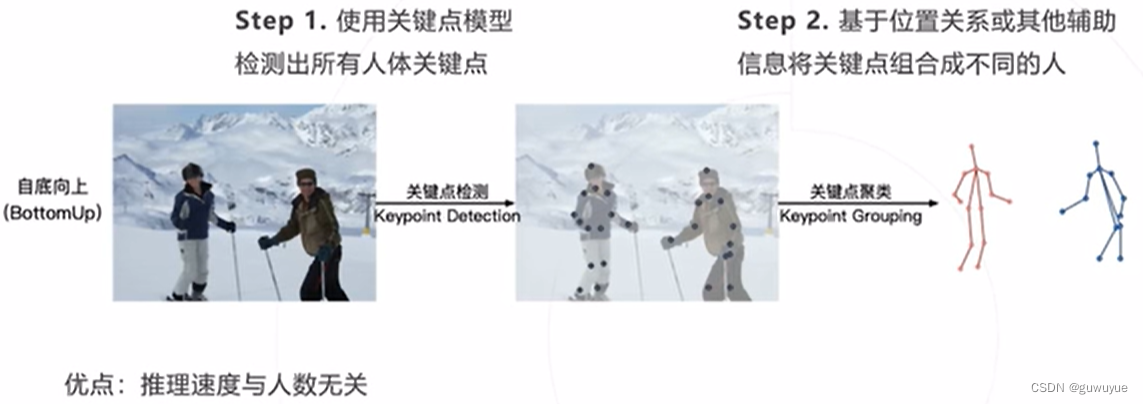
多人姿态估计:自底向上方法
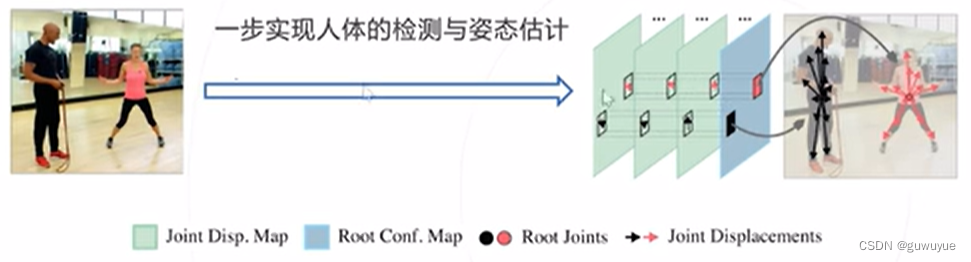
多人姿态估计:单阶段方法
基于Transformer的方法
基于回归的自顶向下方法
DensePose(2014)
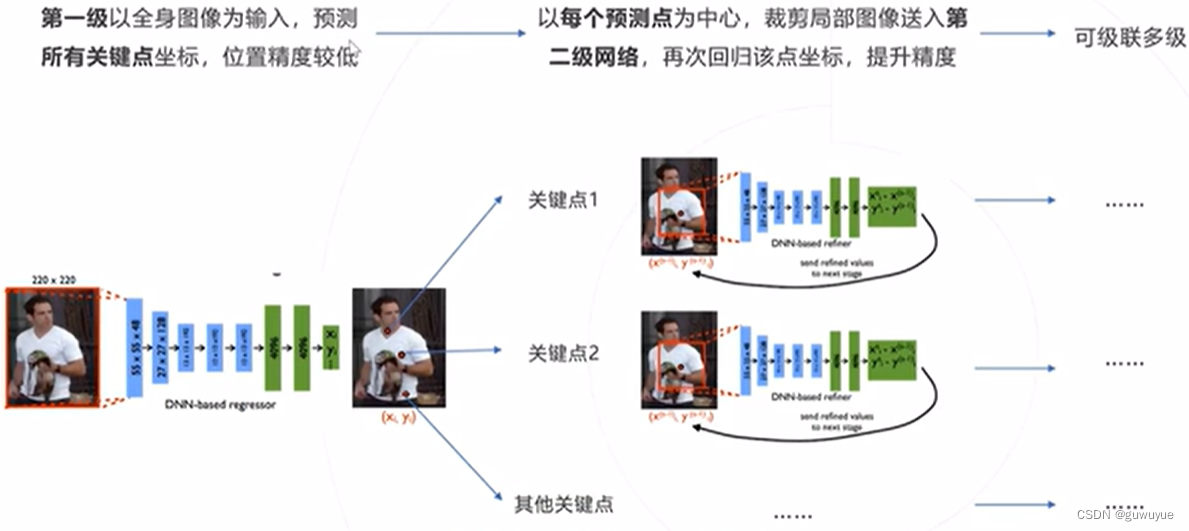
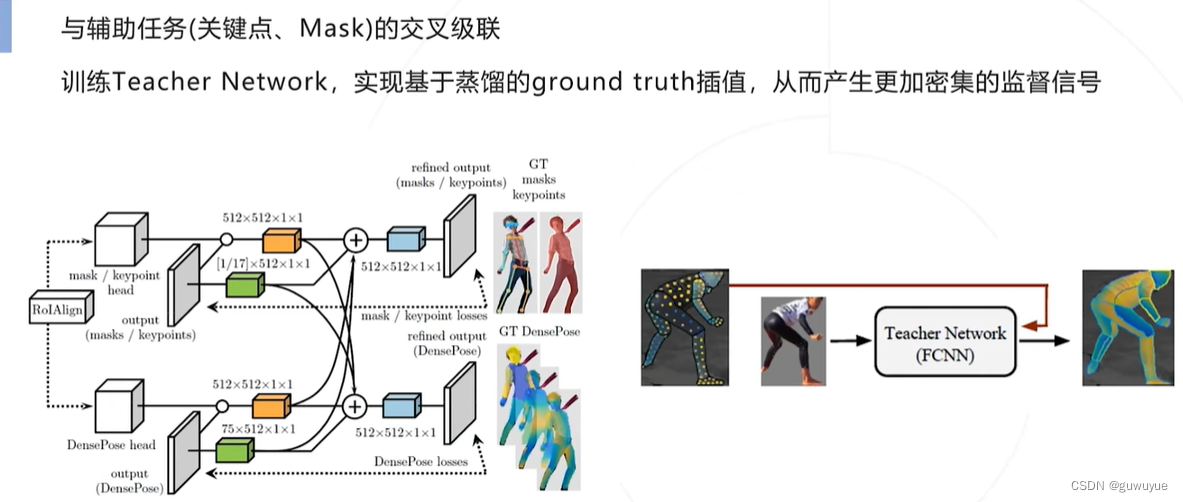
通过级联提升精度
回归方法的优势与劣势
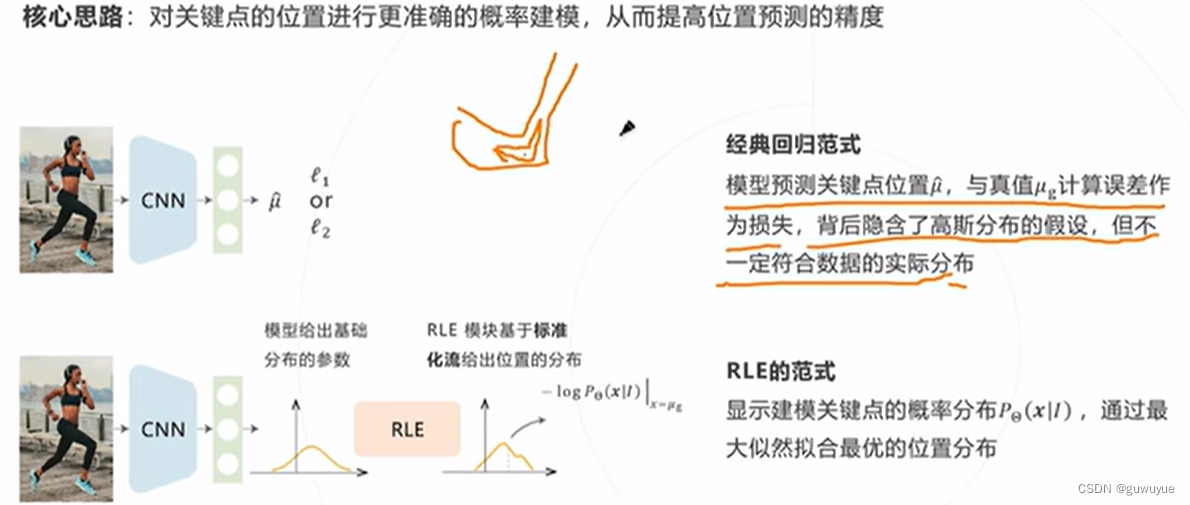
Residual Log-likelihood Estimation(RLE)(2021)
背景知识:回归和最大似然估计的联系
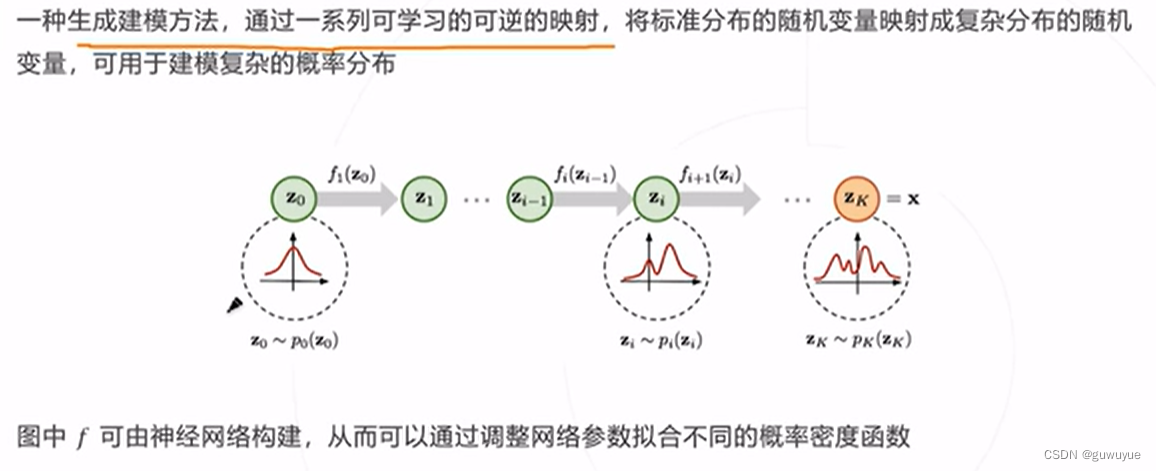
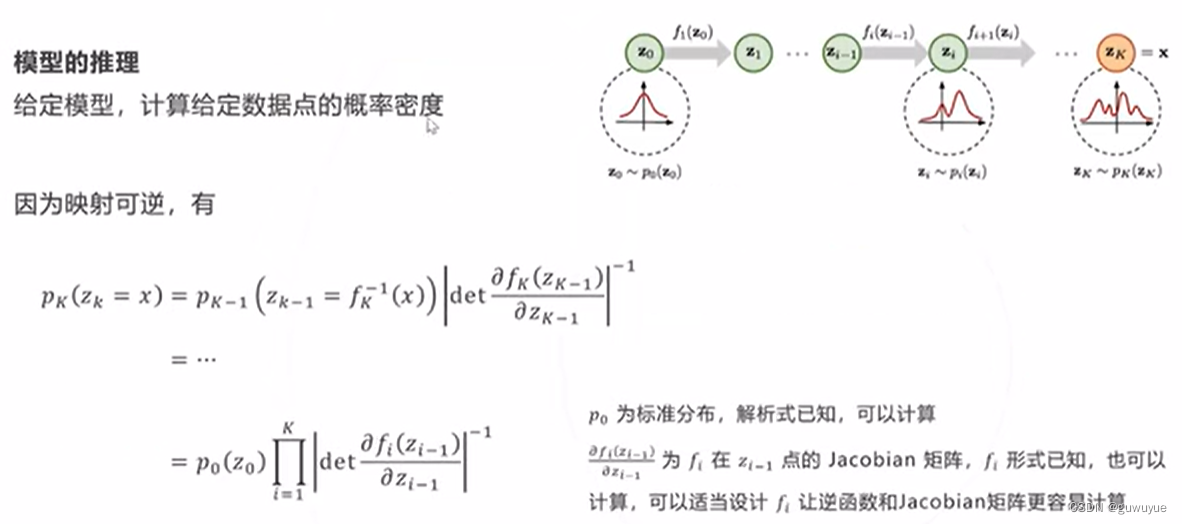
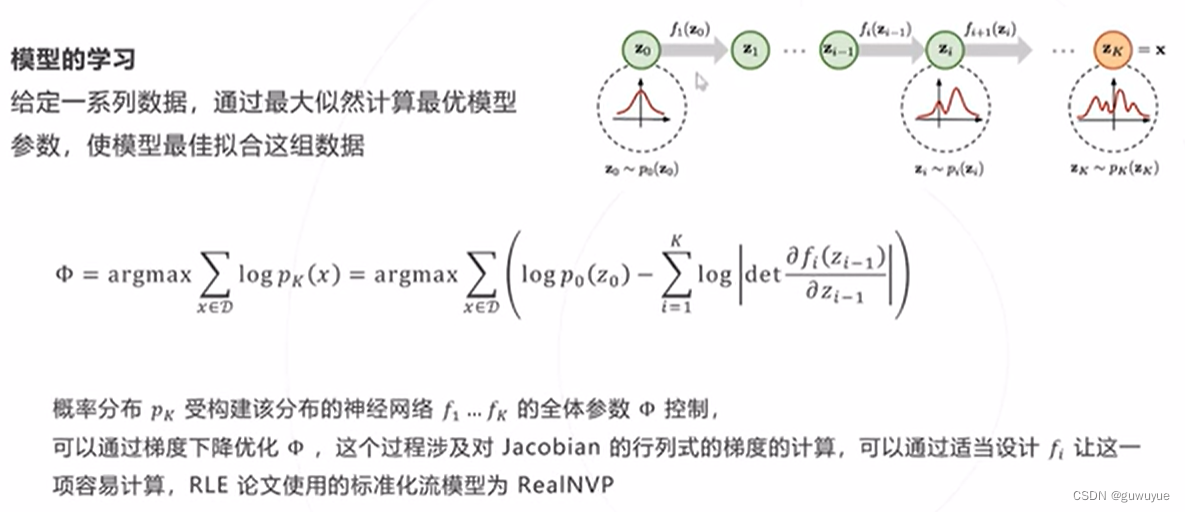
背景知识:标准化流Normalizing Flow
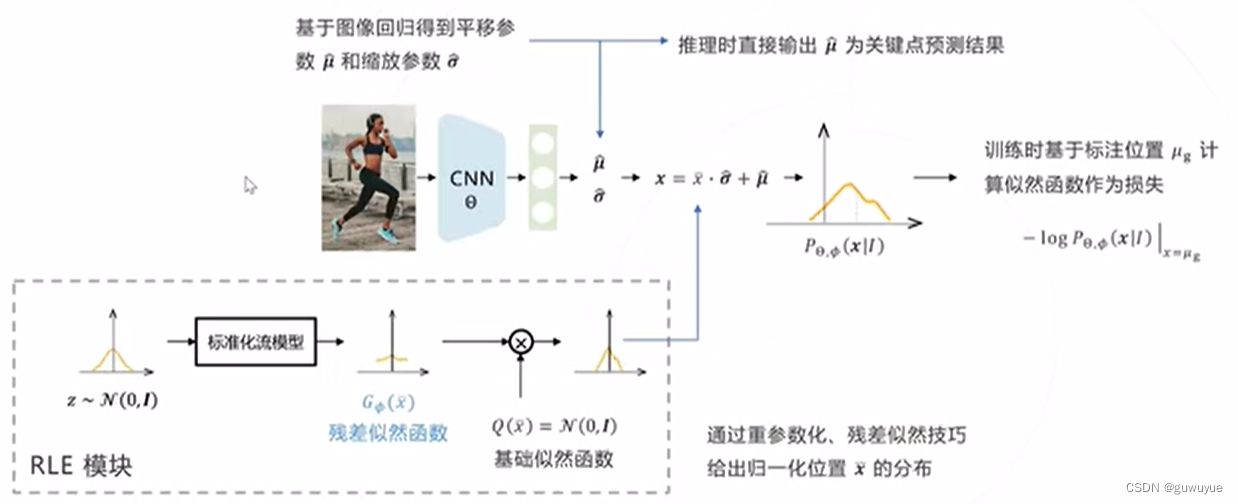
RLE的整体设计
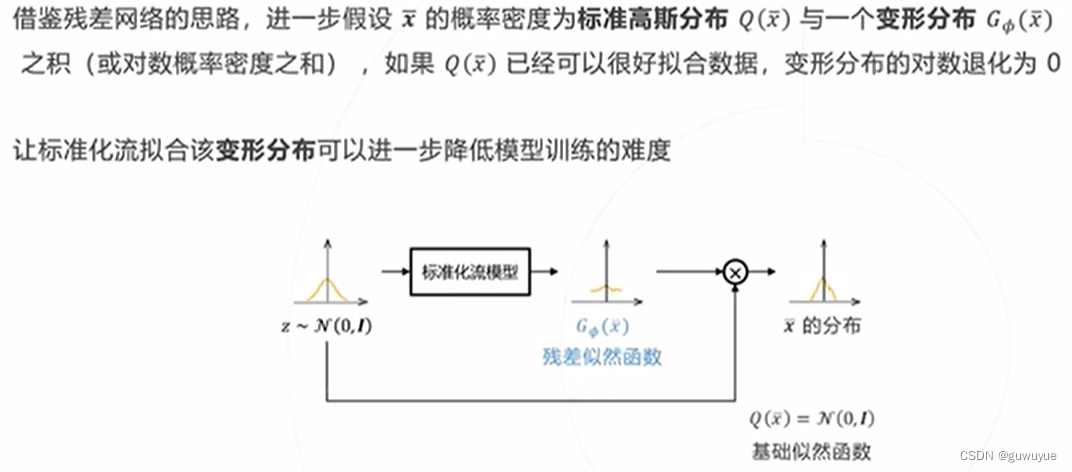
残差似然函数
完整的RLE模型
基于热力图的自顶向下方法
Hourglass(2016)
局部图像的局限
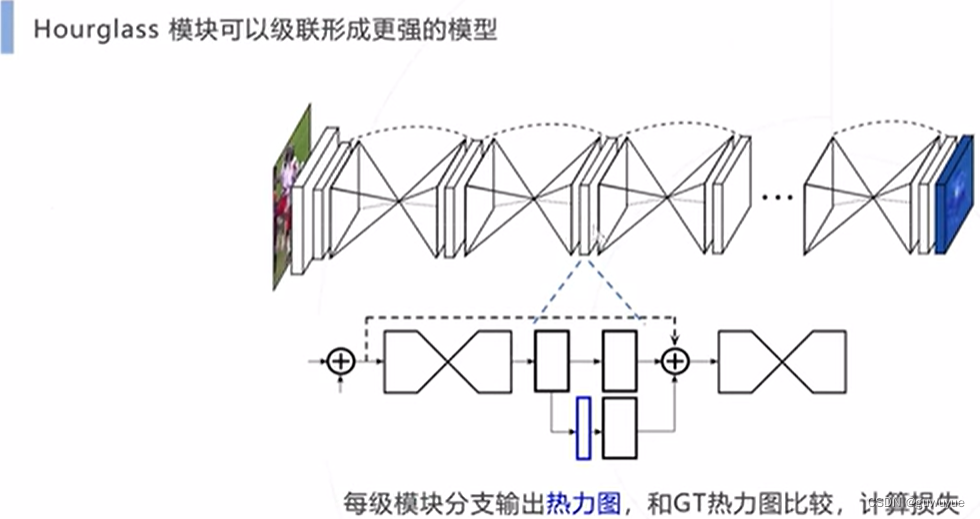
级联Hourglass模块
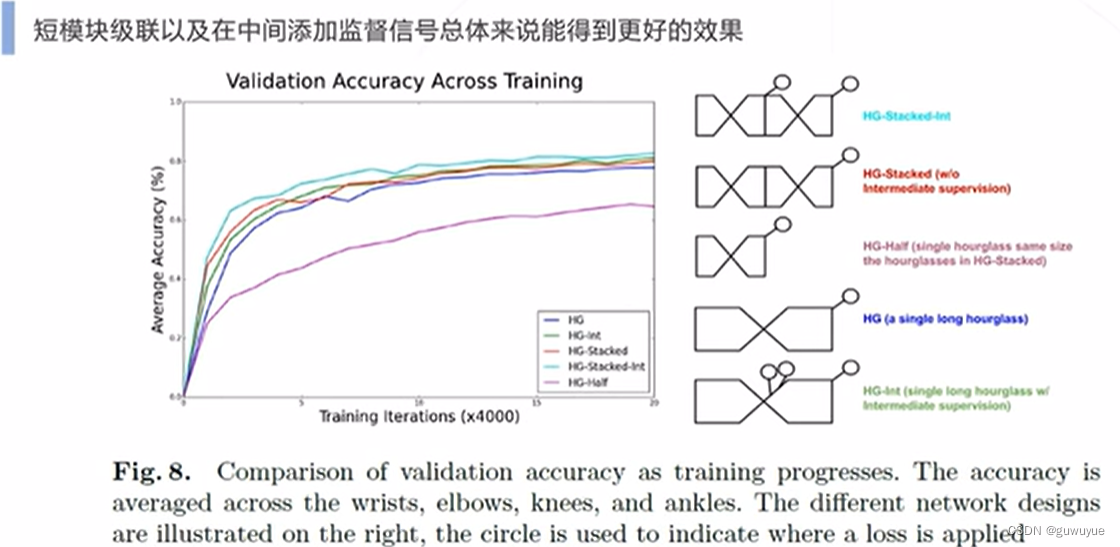
不同的级联和监督方式
Hourglass模块
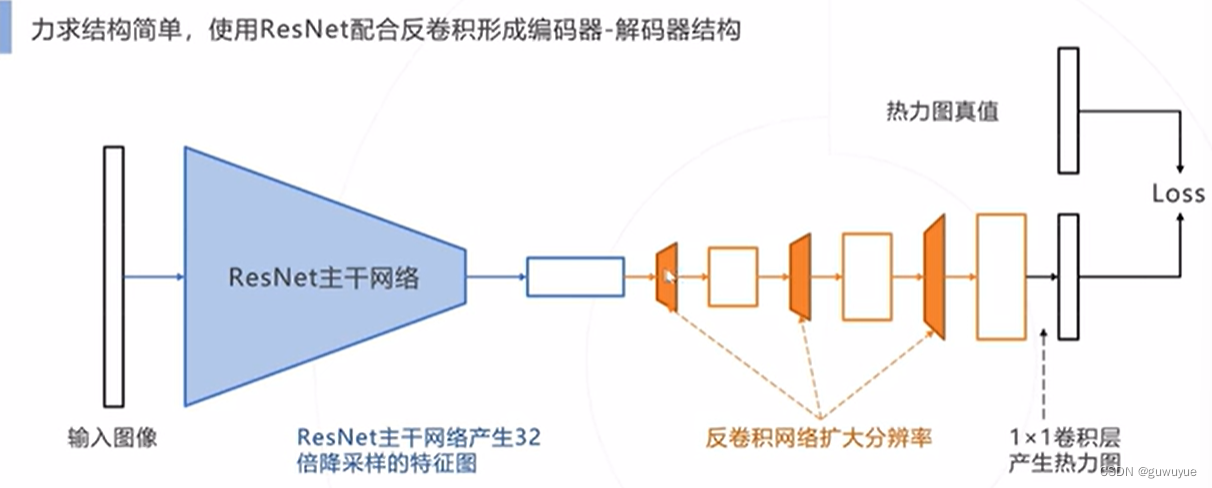
Simple Baseline(2018)
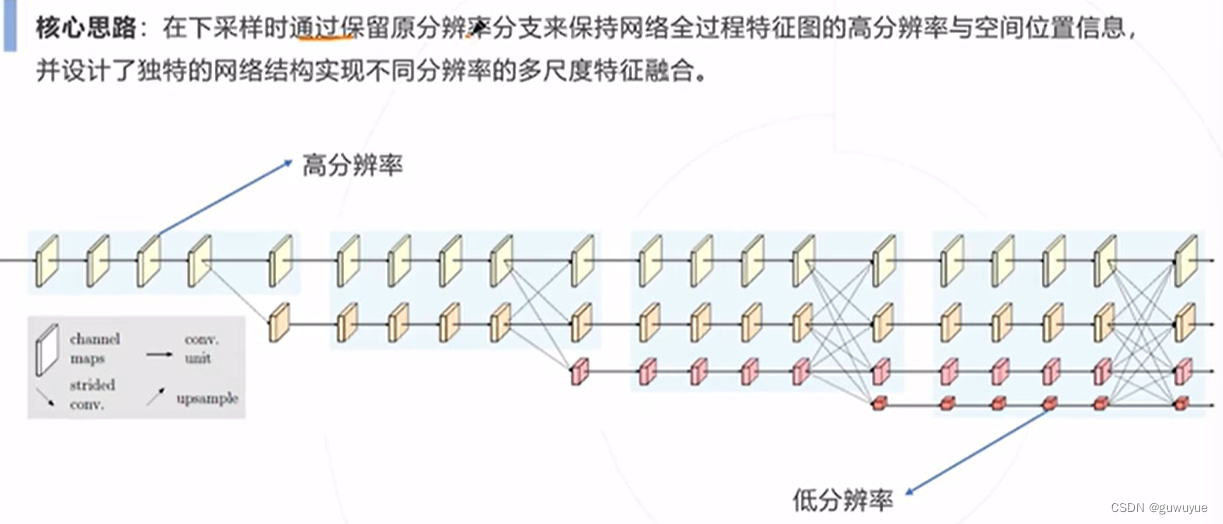
HRNet(2020)
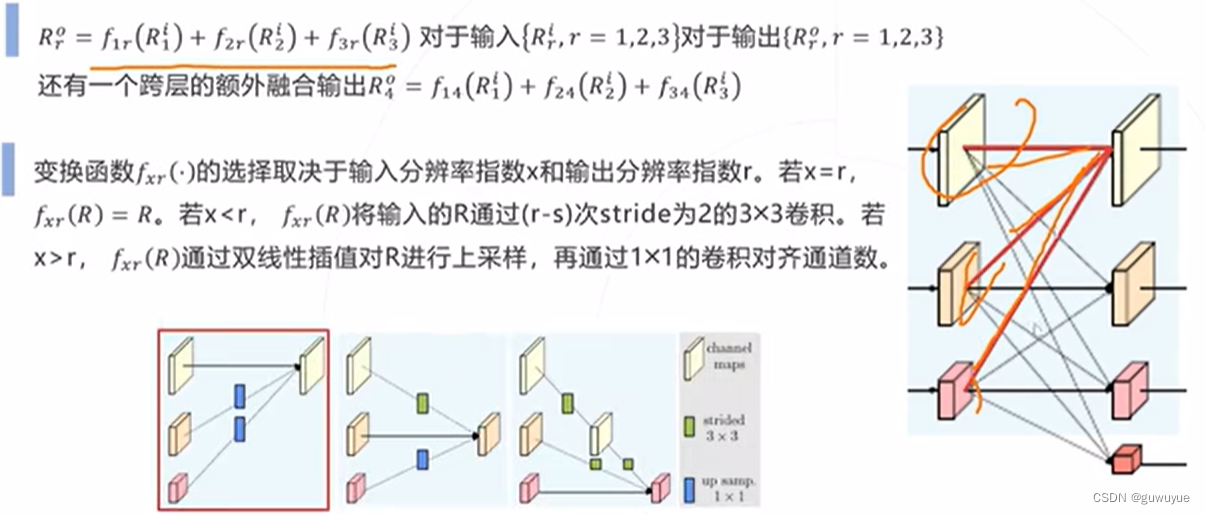
HRNet的特征融合方式
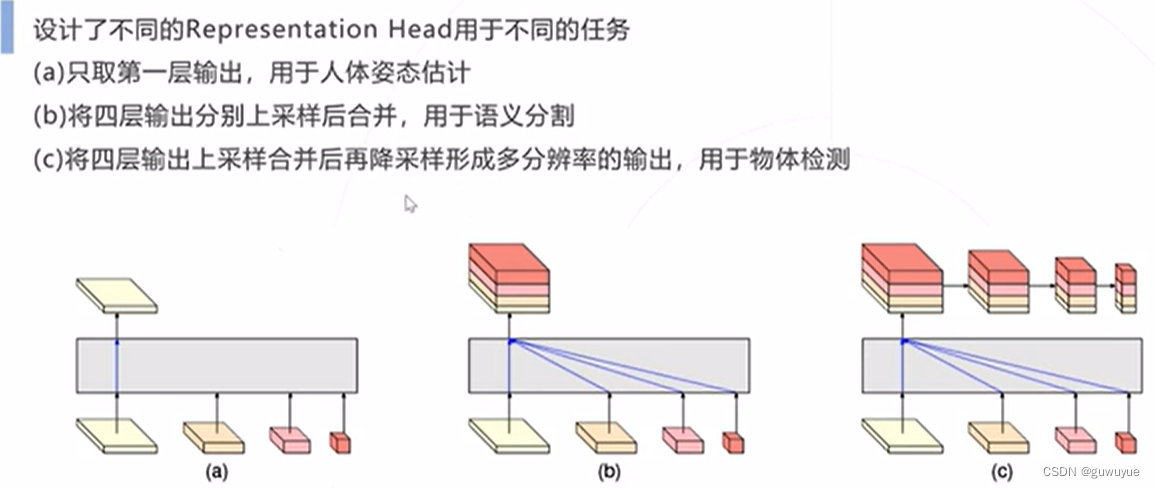
HRNet配合不同任务头
自底向上方法
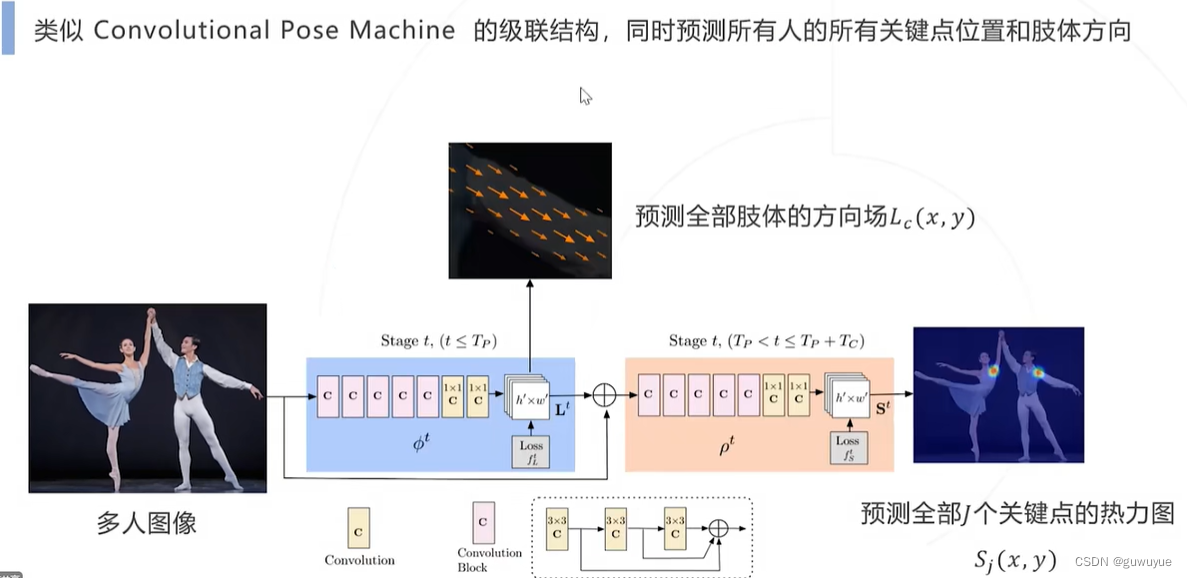
Part Affinit Fields & OpenPose(2016)
关键点与肢体的预测
关键点与关节预测
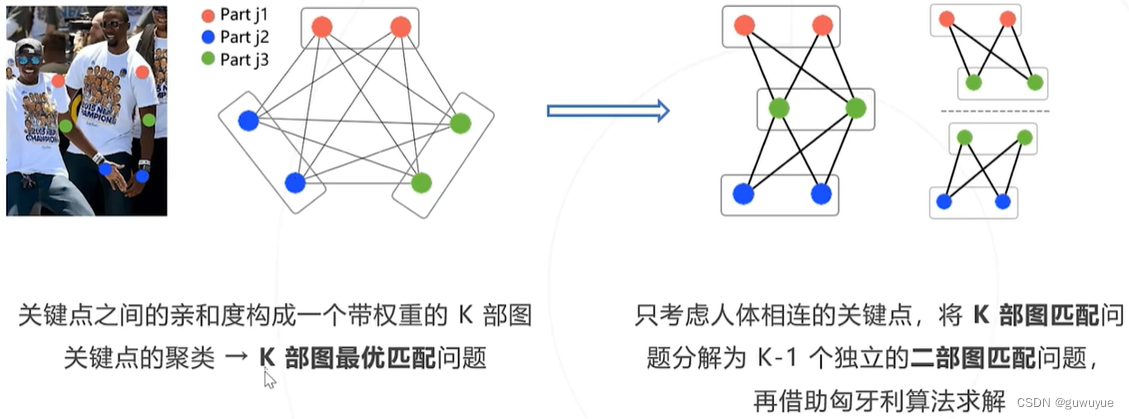
基于亲和度匹配关键点
单阶段方法
SPM(2019)
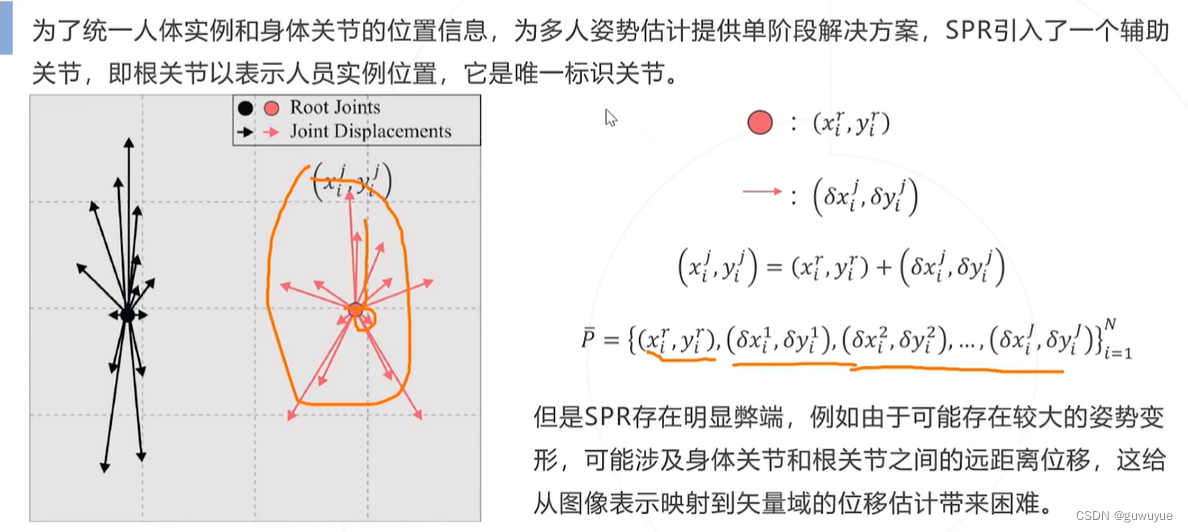
Structrued Pose Representation(SPR)
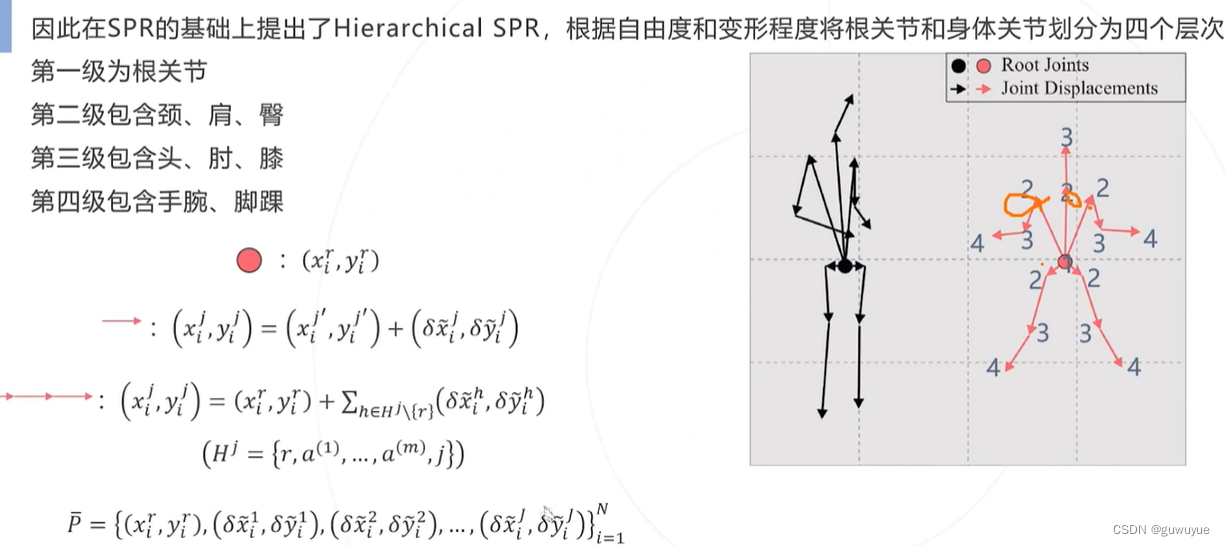
Hierarchical SPR
网络设计
回归策略
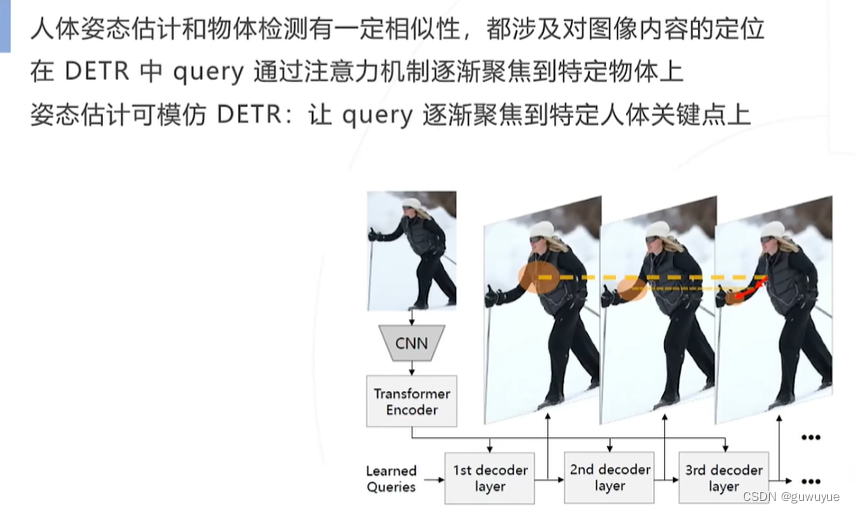
基于Transformer的方法
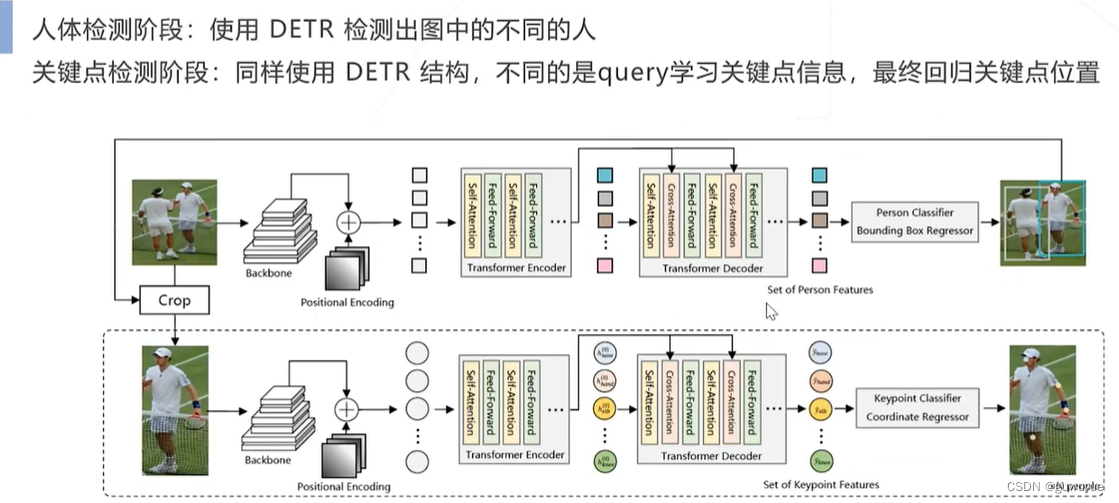
PRTP 2021
PRTR两阶段算法
PRTR单阶段算法
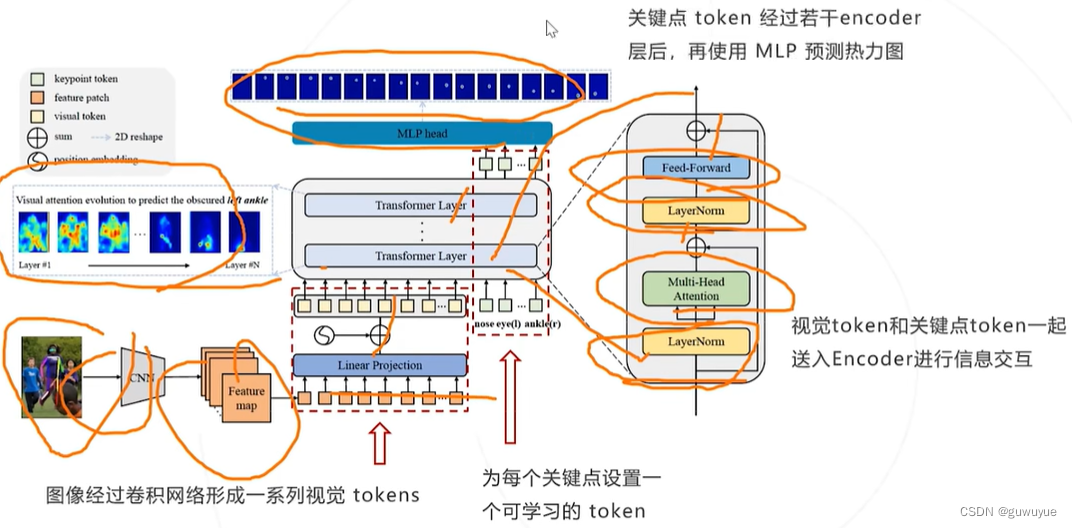
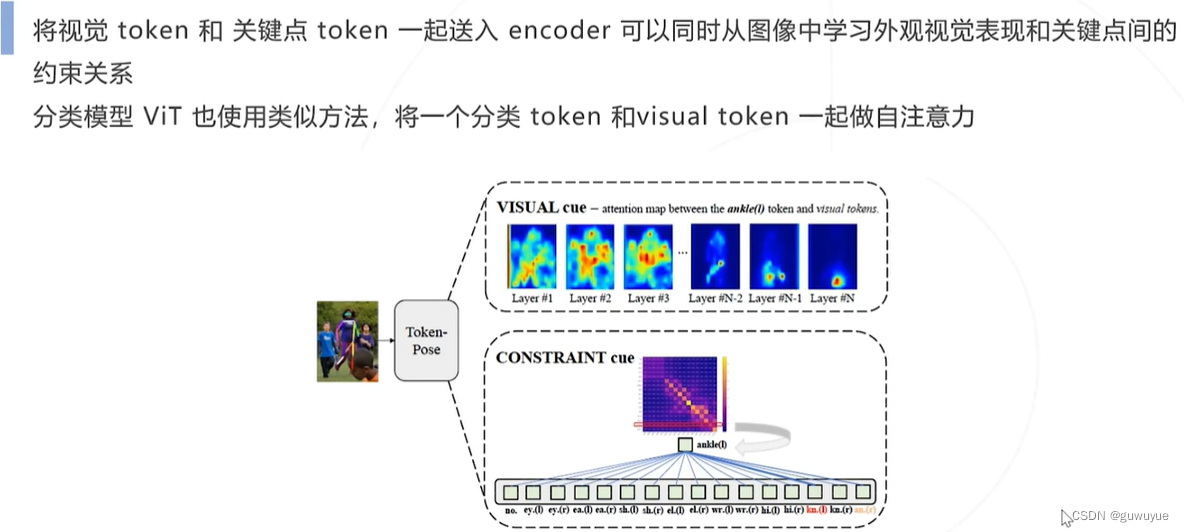
TokenPose(2021)
2D姿态估计小结
3D姿态估计
任务描述
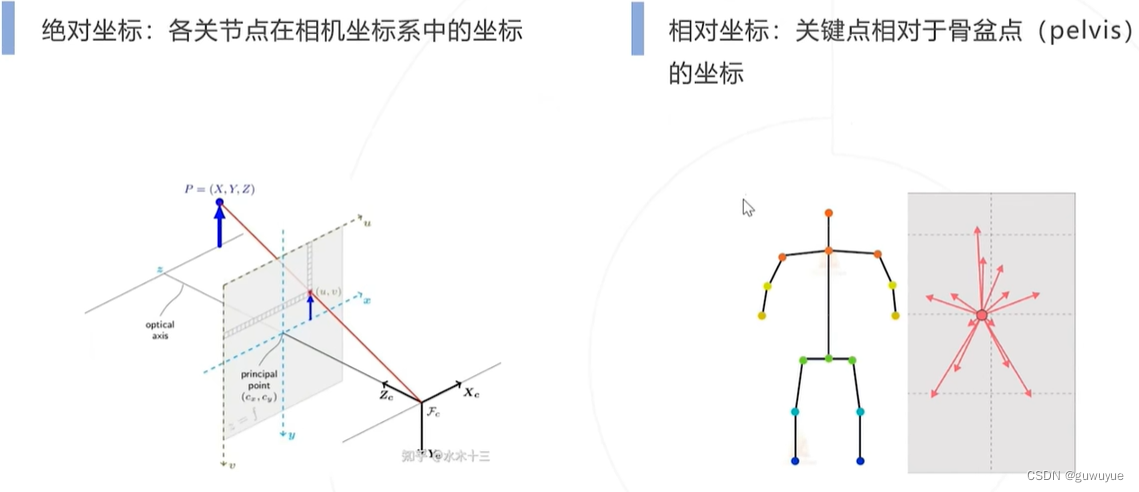
绝对坐标VS相对坐标
难点
思路1:直接预测
思路2:利用视频信息
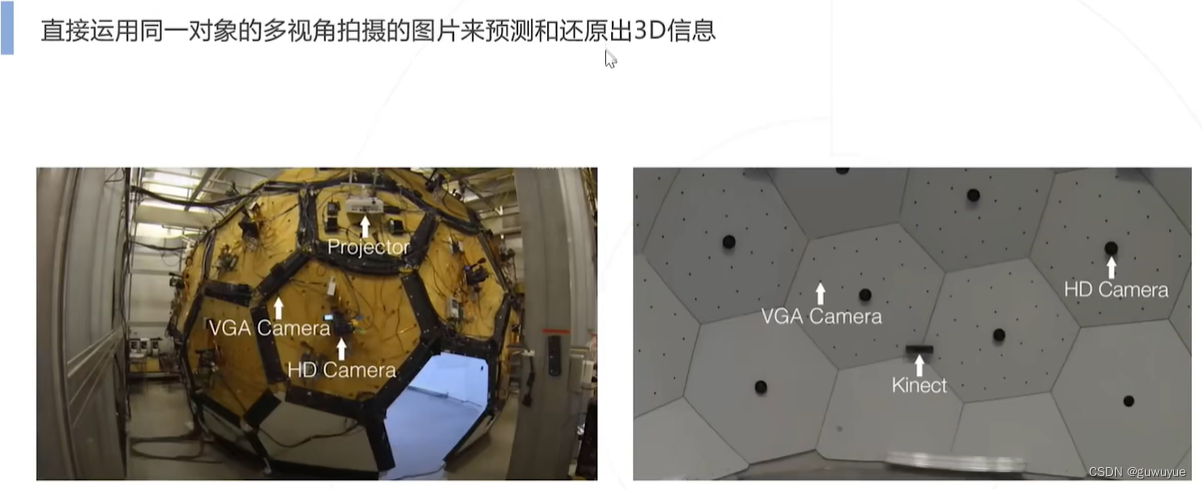
思路3:利用多视角图像
直接预测:Coarse-to-Fine Volumetric Prediction 2017
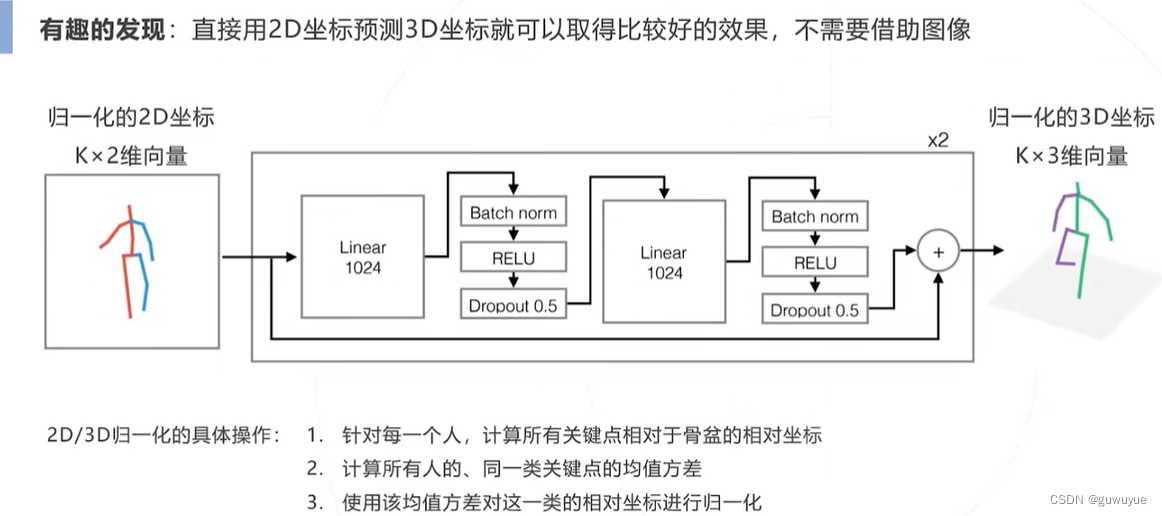
直接预测:Simple Baseline 3D(2017)
利用视频信息:VideoPose3D(2018)
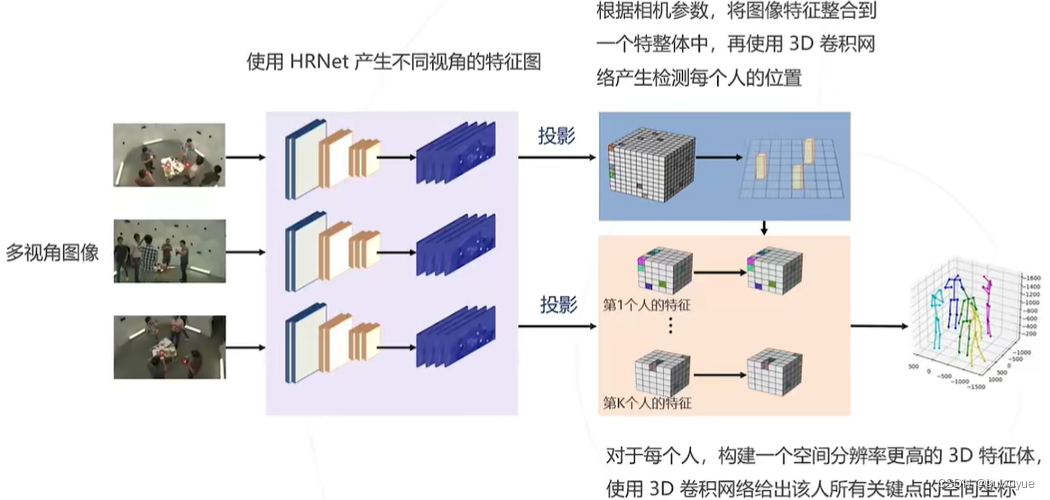
利用多角度图像:VoxelPose(2020)
人体姿态估计的评估方法
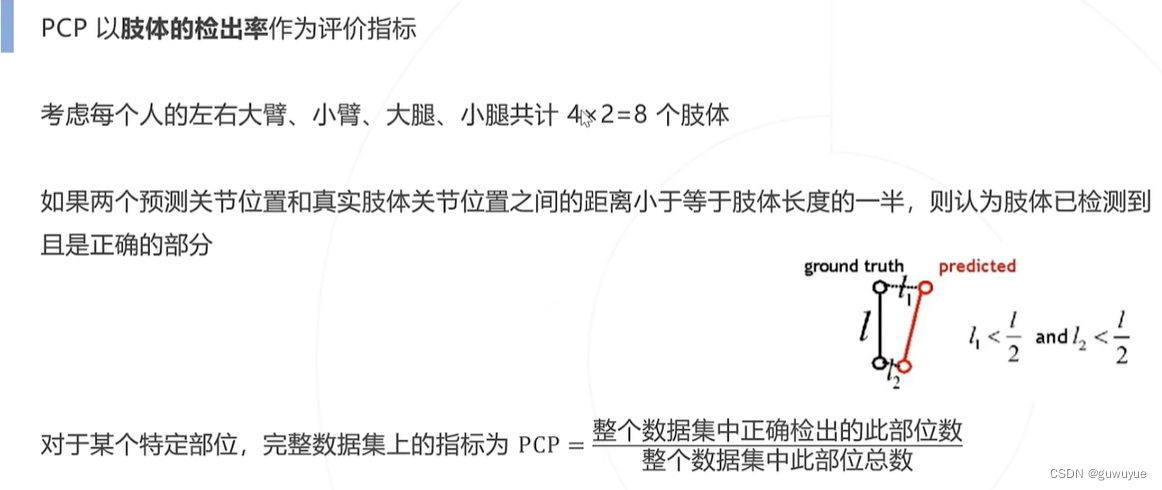
Percentage of Correct Parts(PCP)
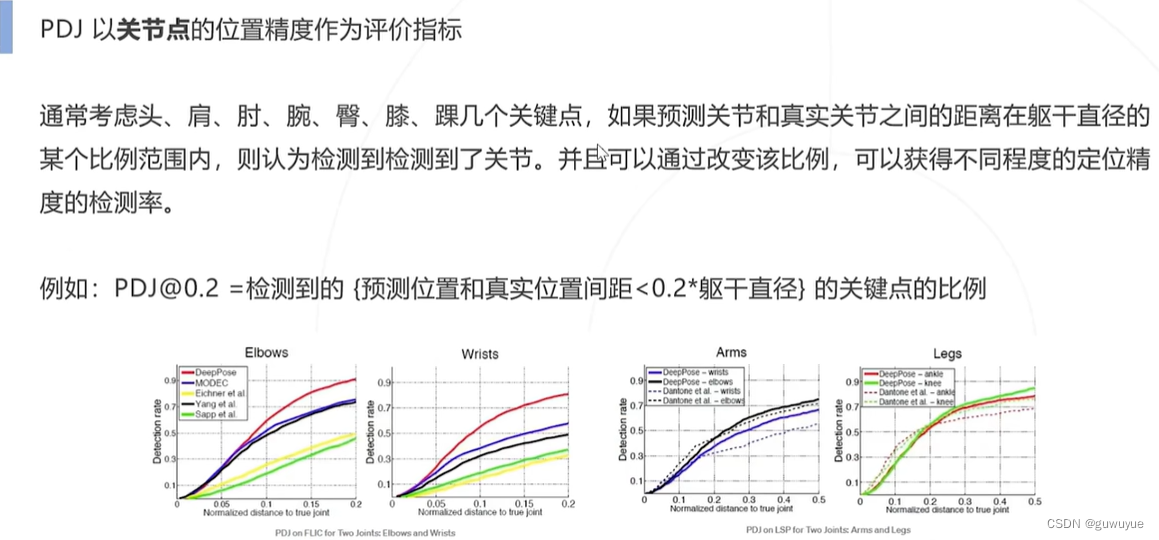
Percentage of Detected Joints(PDJ)
Percentage of Correct Key-points(PCK)
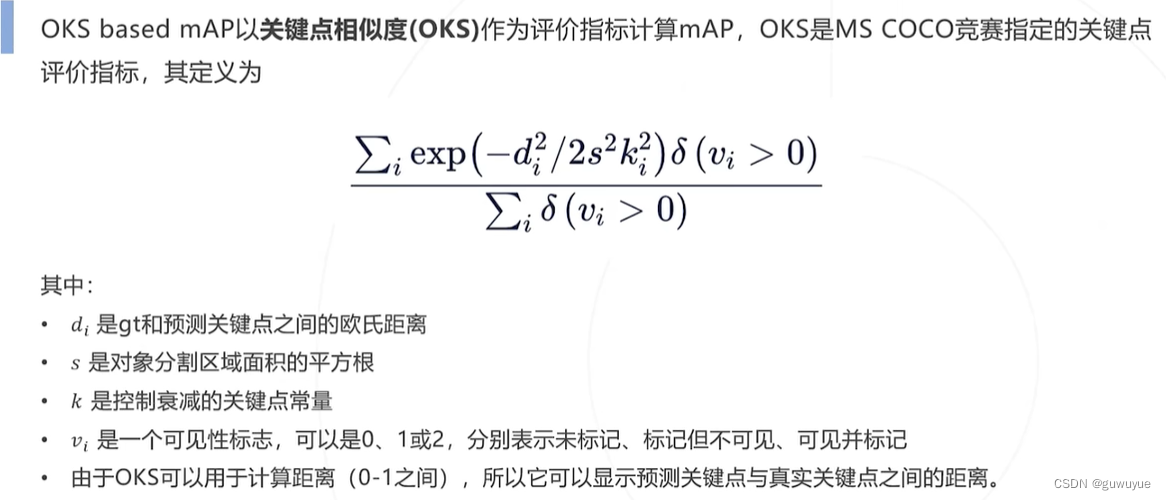
Object Keypoint Similarity (OKS) base mAP
DensePose(2014)与人体参数模型
SMPL人体参数化模型
SMPLify
HMR
总结
-
人体姿态估计的介绍与应用
- 什么是人体姿态估计
- 从给定的图像中识别人脸、手部、身体等关键点。
- 从给定的图像中识别人脸、手部、身体等关键点。
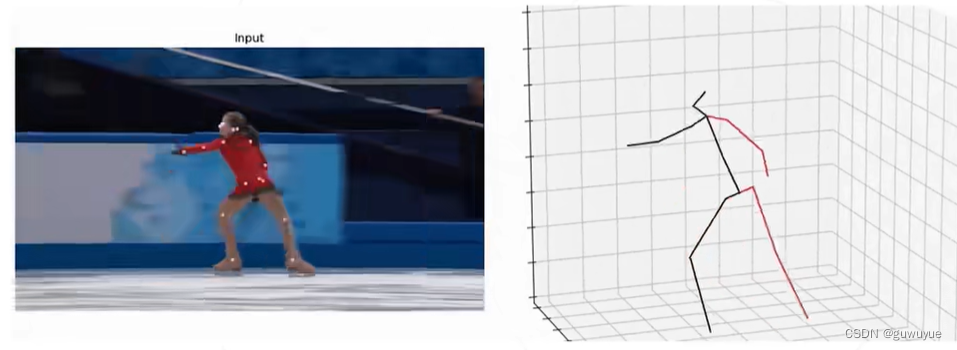
- 3D姿态估计
- 预测人体关键点在三维空间中的坐标,可以在三维空间中还原人体的姿态
- 预测人体关键点在三维空间中的坐标,可以在三维空间中还原人体的姿态
- 人体参数化模型
- 从图像或视频中恢复出运动的3D人体模型
- 从图像或视频中恢复出运动的3D人体模型
- 下游任务:行为识别、人机交互、动作行为分析
- 什么是人体姿态估计
-
2D姿态估计
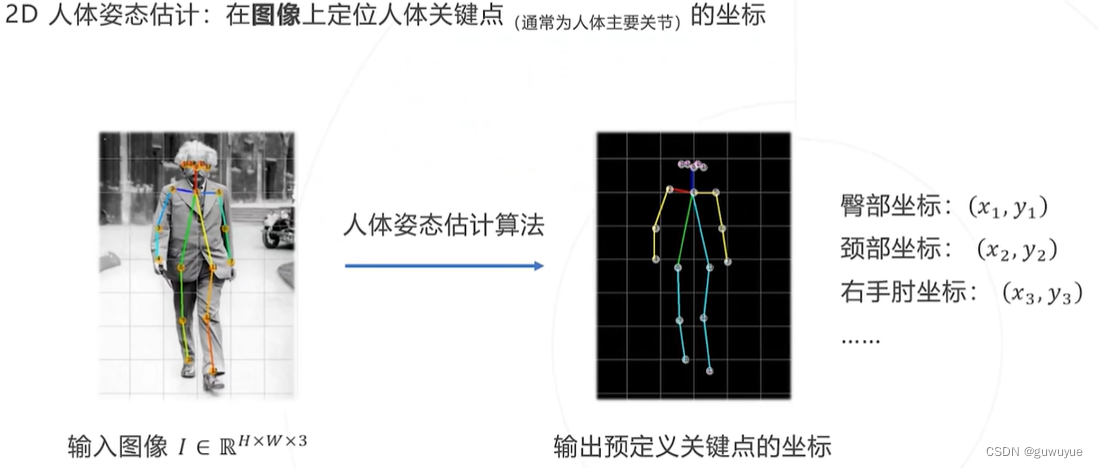
- 任务描述
- 任务描述
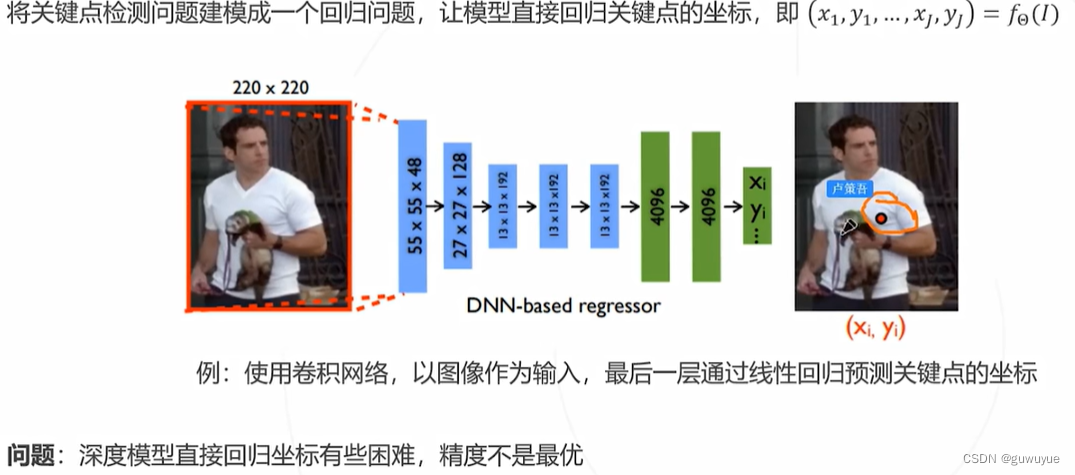
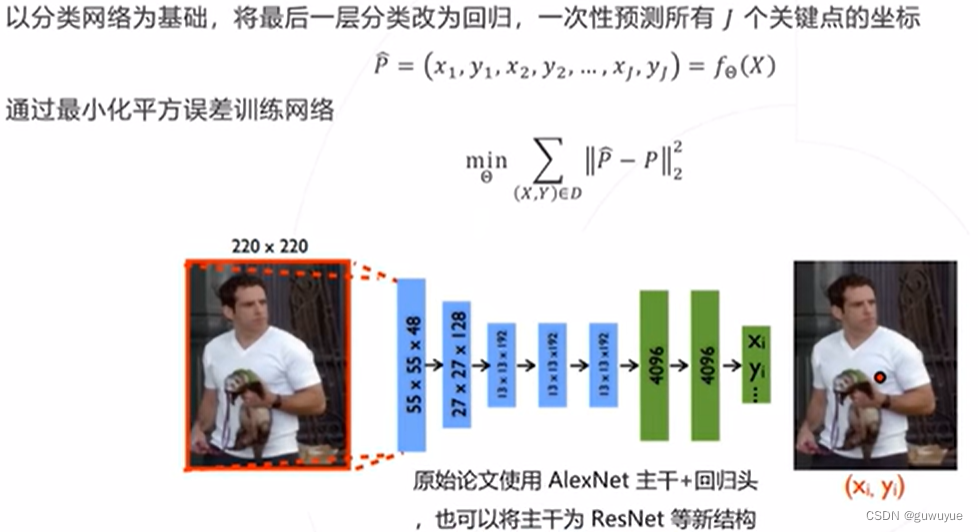
- 基本思路:基于回归(Regression Based)
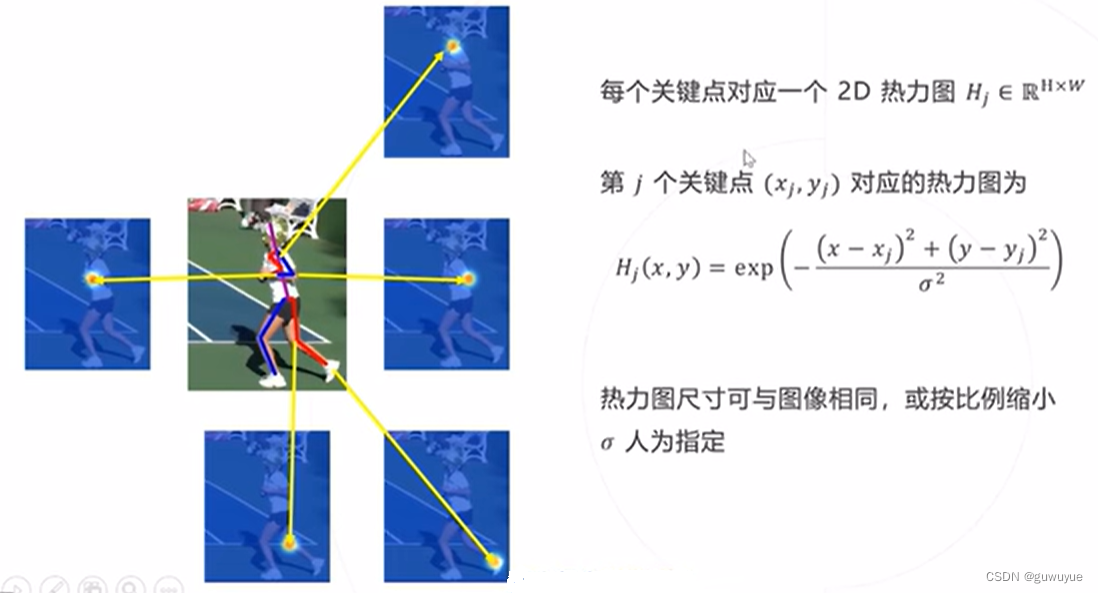
- 基本思路:基于热力图(Heatmap Based)
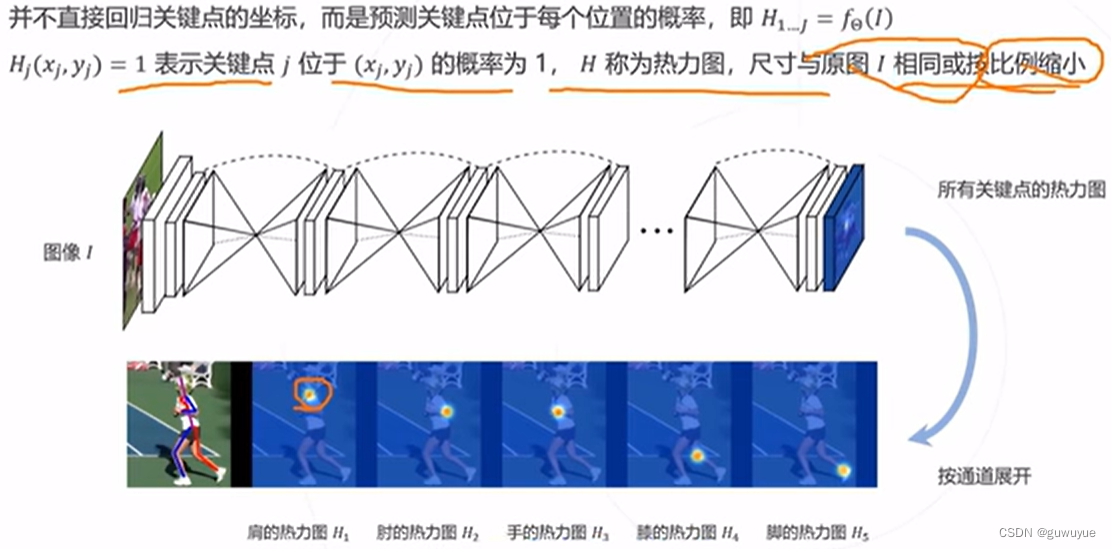
- 热力图可以基于原始关键点坐标生成,作为训练网络的监督信息
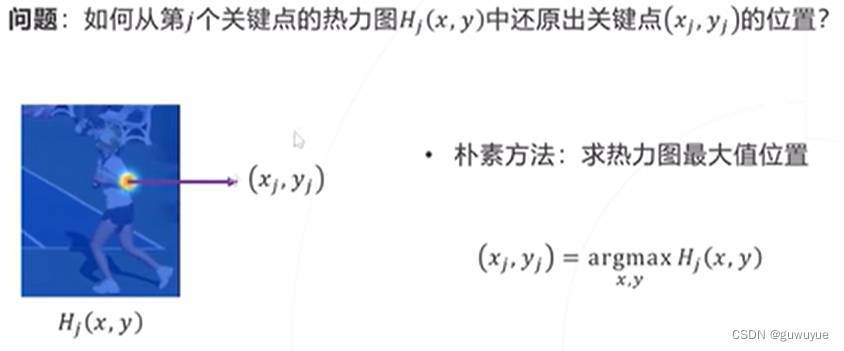
- 网络预测的热力图也可以通过求极大值等方法得到关键点的坐标
- 模型预测热力图比直接回归坐标相对容易,模型精度相对更高,因此主流算法更多基于热力图,但预测热力图的计算消耗大于直接回归
- 从数据标注生成热力图
- 使用热力图训练模型
- 从热力图还原关键点
-
多人姿态估计:自顶向下方法
-
多人姿态估计:自底向上方法
-
多人姿态估计:单阶段方法
-
基于Transformer的方法
-
基于回归的自顶向下方法
-
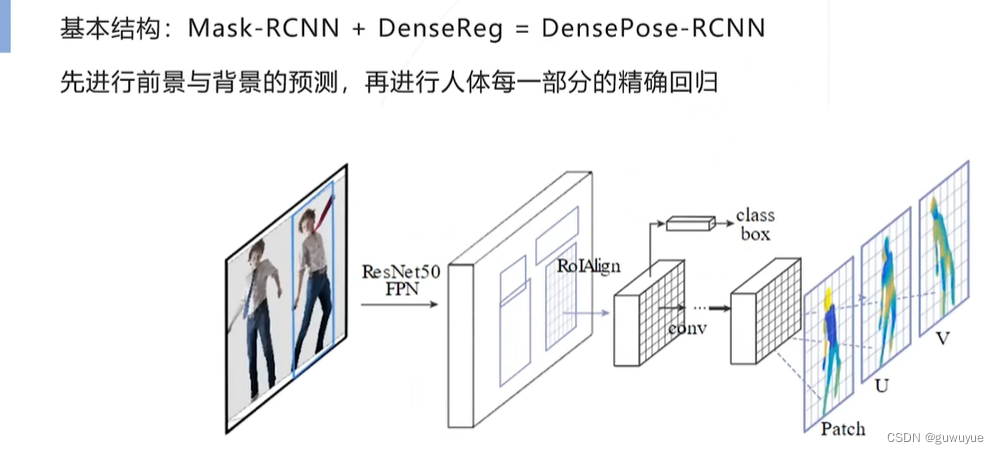
DensePose(2014)
-
通过级联提升精度
-
回归方法的优势与劣势
- 优势:
- 回归模型理论上可以达到无线精度,热力图方法的精度受限于特征图的空间分辨率
- 回归模型不需要维持高分辨率特征图,计算层面更高效,相比之下,热力图方法需要计算和存储高分辨率的热力图和特征图,计算成本高
- 劣势:
- 图像到关键点坐标的映射高度非线性,导致回归坐标比回归热力图更难,回归方法的精度也弱于热力图方法,因此DeepPose提出之后的很长一段时间内,2D关键点预测算法主要基于热力图
- 优势:
-
Residual Log-likelihood Estimation(RLE)(2021)
-
背景知识:回归和最大似然估计的联系
-
背景知识:标准化流Normalizing Flow
-
RLE的整体设计
-
残差似然函数
-
完整的RLE模型
-
-
基于热力图的自顶向下方法
-
Hourglass(2016)
-
局部图像的局限
-
级联Hourglass模块
-
不同的级联和监督方式
-
Hourglass模块
-
Simple Baseline(2018)
-
HRNet(2020)
-
HRNet的特征融合方式
-
HRNet配合不同任务头
-
-
自底向上方法
-
Part Affinit Fields & OpenPose(2016)
-
关键点与肢体的预测
-
关键点与关节预测
-
基于亲和度匹配关键点
-
-
单阶段方法
-
SPM(2019)
-
Structrued Pose Representation(SPR)
-
Hierarchical SPR
-
网络设计
-
回归策略
- 损失函数
-
-
基于Transformer的方法
-
PRTP 2021
-
PRTR两阶段算法
-
PRTR单阶段算法
-
TokenPose(2021)
-
2D姿态估计小结
-
-
3D姿态估计
-
任务描述
-
绝对坐标VS相对坐标
-
难点
-
思路1:直接预测
-
思路2:利用视频信息
-
思路3:利用多视角图像
-
直接预测:Coarse-to-Fine Volumetric Prediction 2017
-
直接预测:Simple Baseline 3D(2017)
-
利用视频信息:VideoPose3D(2018)
-
利用多角度图像:VoxelPose(2020)
-
-
人体姿态估计的评估方法
-
Percentage of Correct Parts(PCP)
-
Percentage of Detected Joints(PDJ)
-
Percentage of Correct Key-points(PCK)
-
Object Keypoint Similarity (OKS) base mAP
-
-
DensePose(2014)与人体参数模型
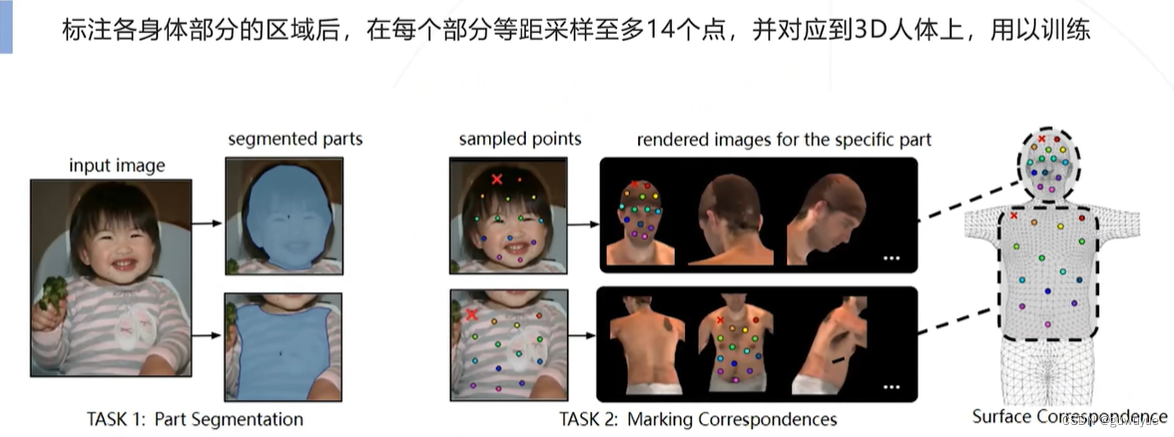
- 人体表面参数化
- 标注方法
- 网络结构
- 改进设计
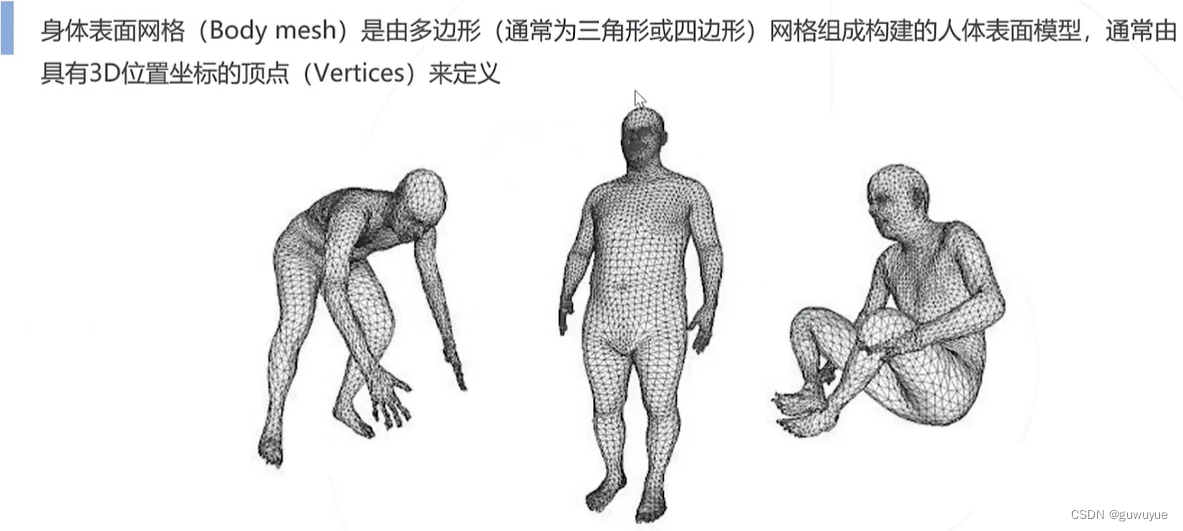
- 身体表面网格(Body Mesh)
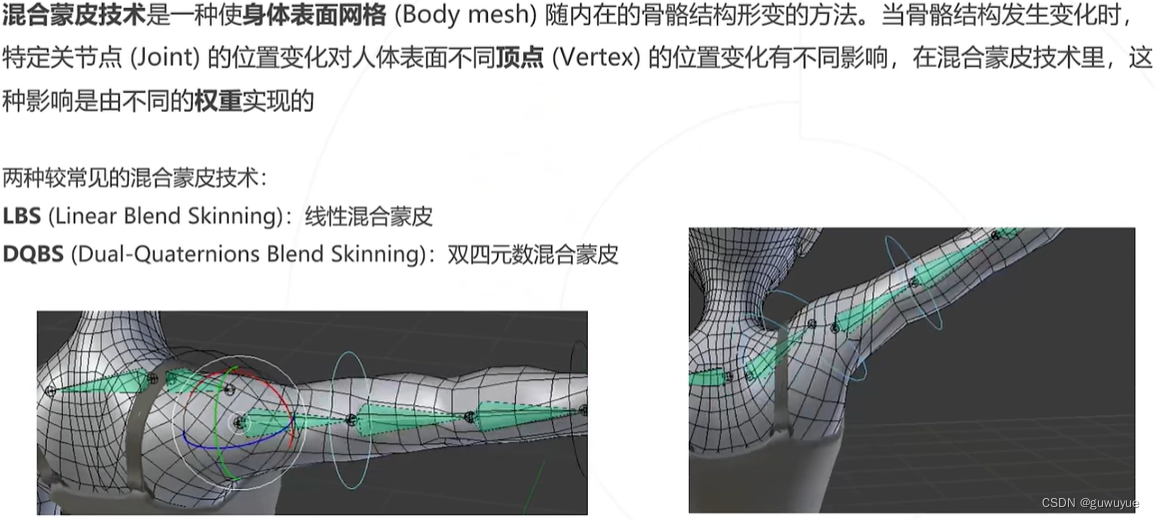
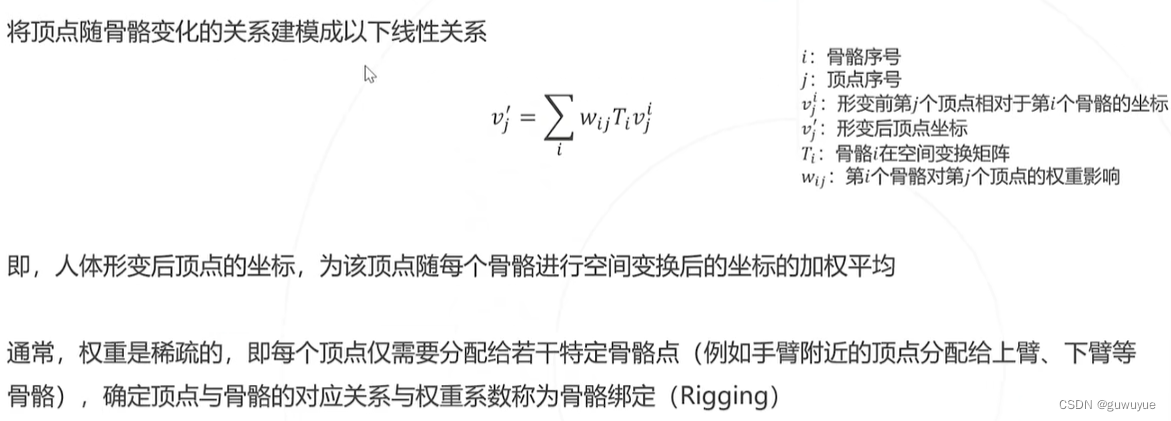
- 混合蒙皮技术(Blend Skinning)
- 线性混合蒙皮LBS(Linear Blend Skinning)
-
SMPL人体参数化模型
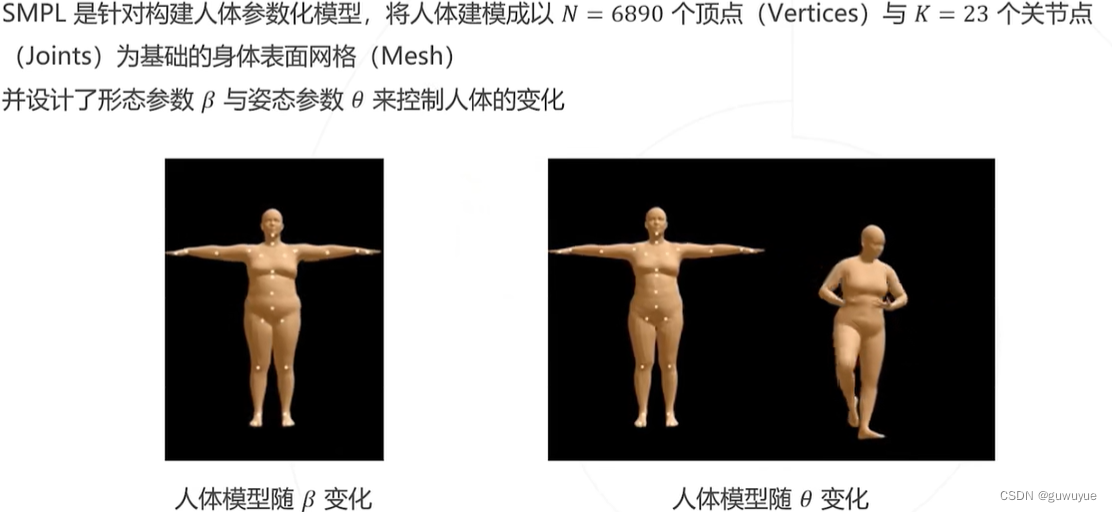
- 形参参数与姿态参数
- SMPL的基本设计逻辑
- SMPL人体模型表示
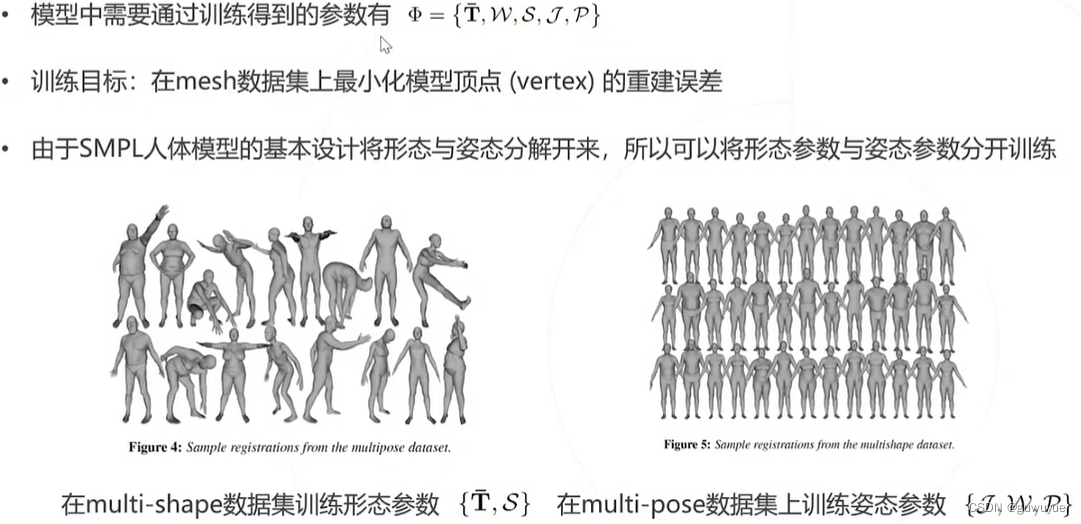
- 训练设计
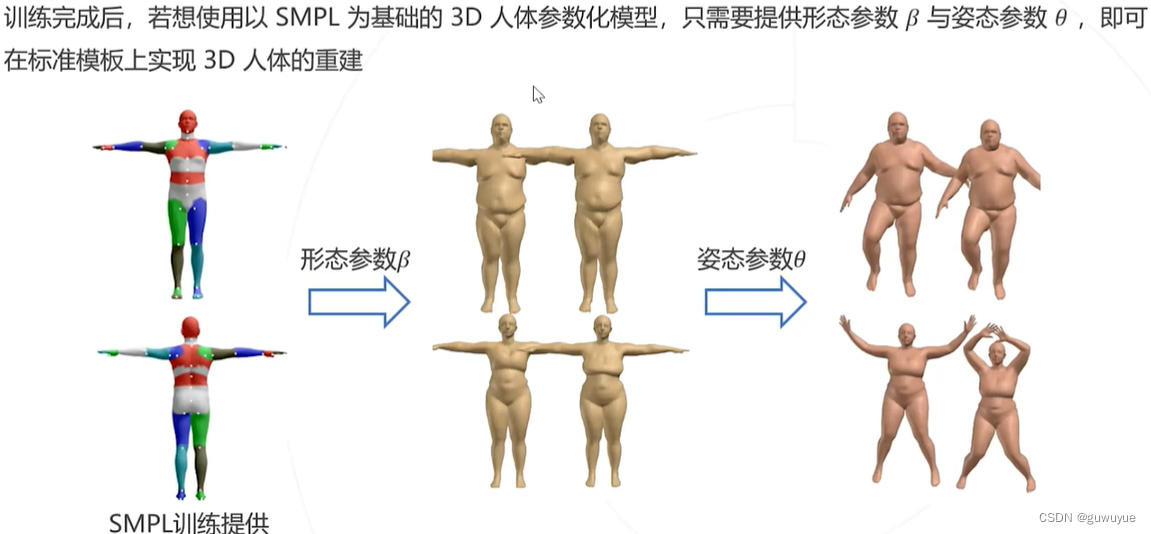
- SMPL模型的应用
-
SMPLify
- SMPLify算法流程
- 关键点投影损失
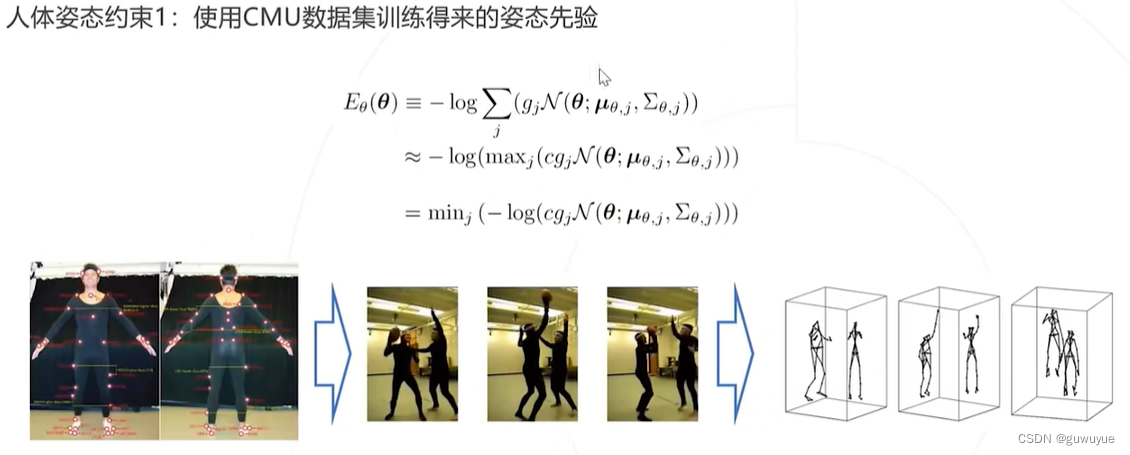
- 人体姿态约束
- “胶囊”近似人体
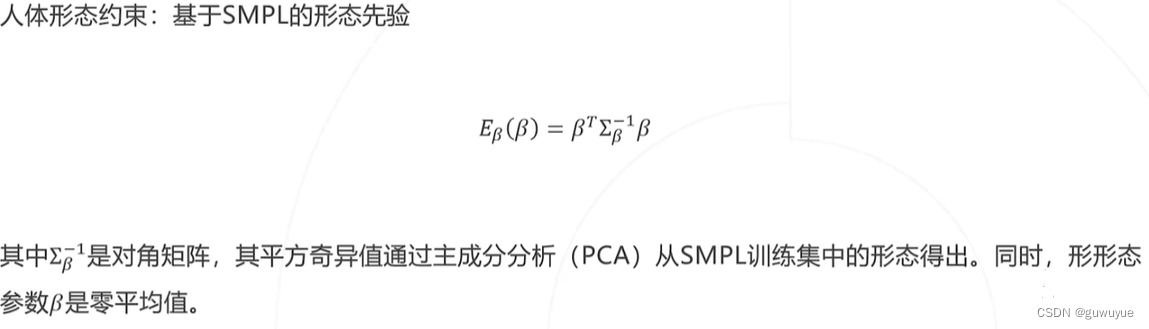
- 人体形态约束
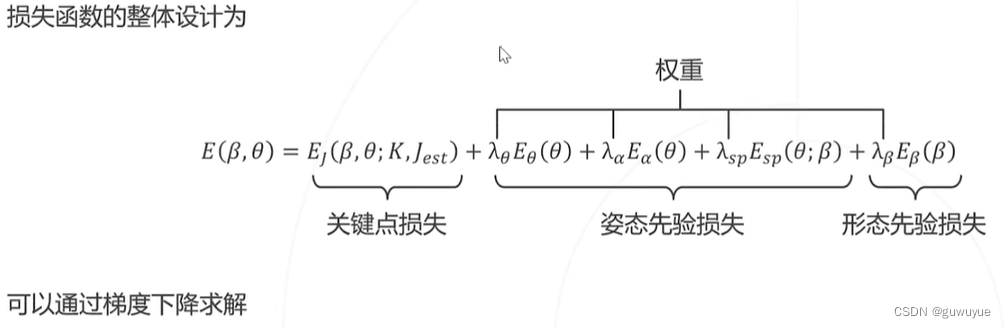
- 损失函数
-
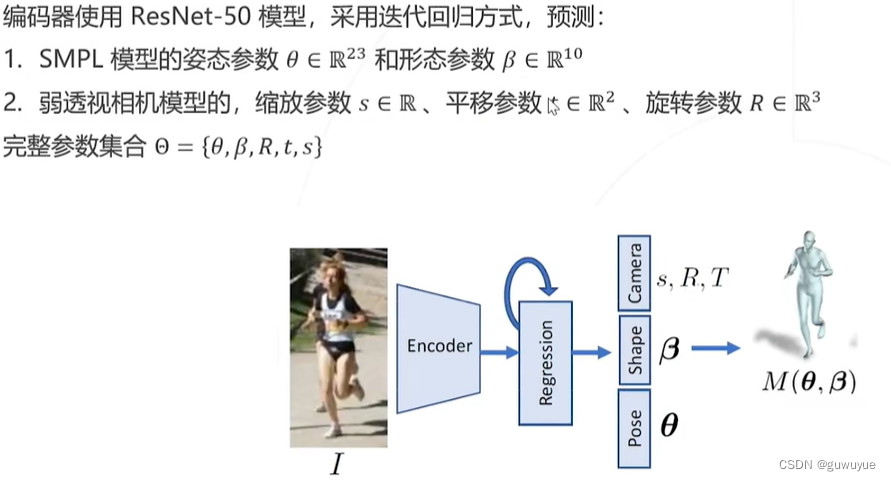
HMR
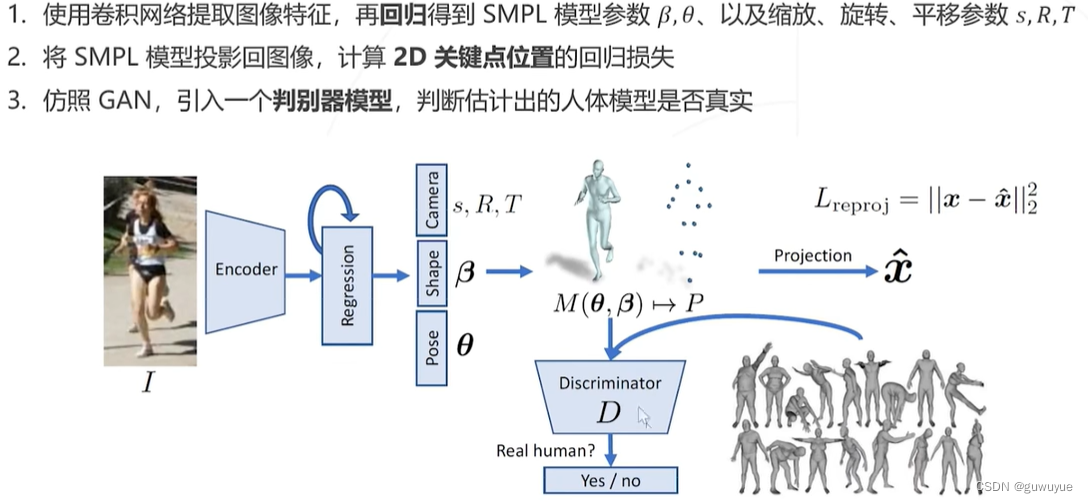
- 算法设计
- 回归模型设计
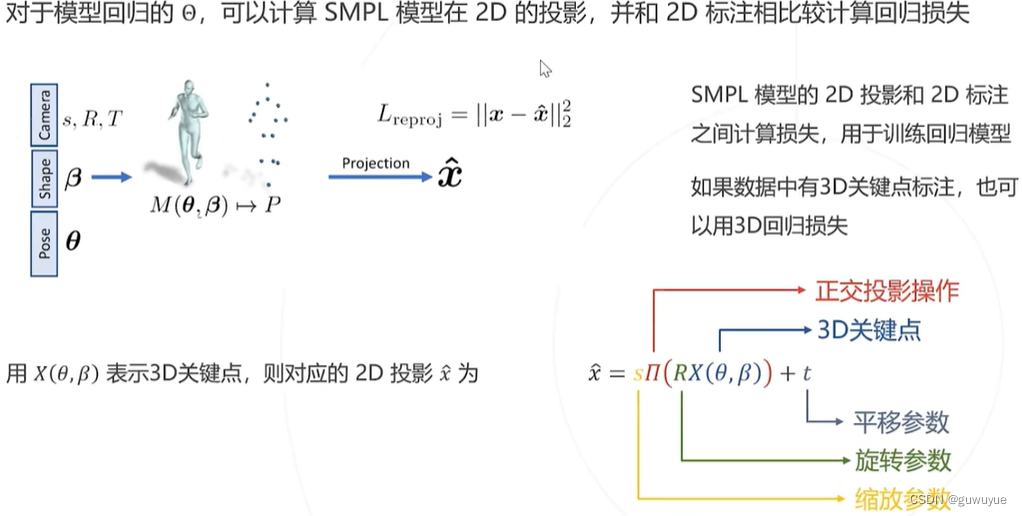
- 2D投影损失
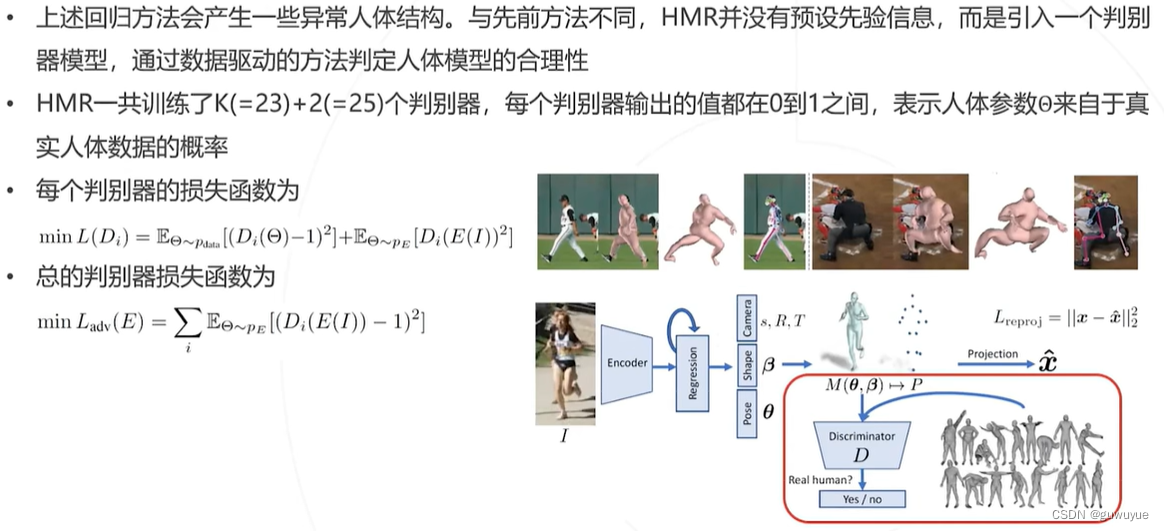
- 引入判别器
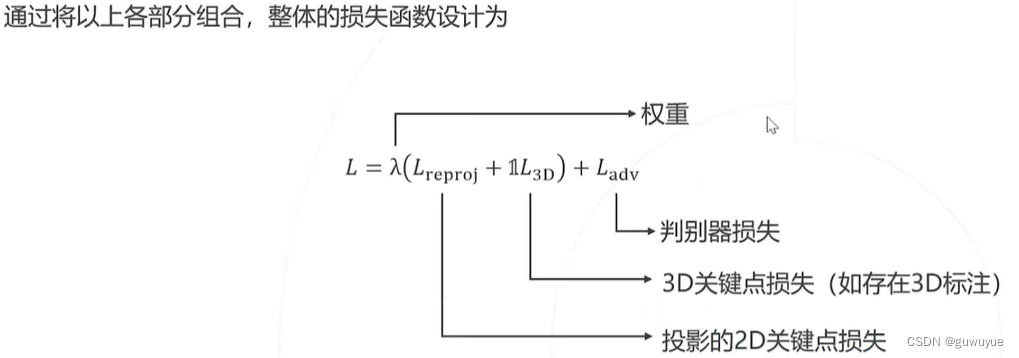
- 损坏函数
- 人体表面参数化

































总结







![[POJO]POJO的设计规范Lombok框架](https://img-blog.csdnimg.cn/a7ab8593d422486d956c2af186903623.png)