原创 | 文 BFT机器人

01 摘要
该论文提出了一种基于范围图像的高效3D物体检测方法,通过利用图卷积核来提取每个像素周围的局部几何信息。
作者设计了一种新颖的2D卷积网络架构,并提出了四种替代内积核心的卷积核,以注入所需的三维信息。该方法在Waymo开放数据集上进行了验证,并取得了优秀的实验结果。然而,该方法在姿态估计和数据增强方面仍存在一些挑战。
02 研究内容
深度学习在点云理解中的应用越来越受到关注,本文介绍的方法是近年来的研究热点之一。
作者指出了传统方法在处理大范围图像时的低效性,并提出了一种新的点云表示方法,即透视点云(PPC),以及相应的卷积核来提高性能。
本文回顾了点云理解领域的相关工作,包括处理稀疏点云的不同架构和应用场景。作者指出了现有方法的一些限制,并强调了PPC方法的创新性。
本文详细介绍了PPC方法的设计和实现。通过设计一个2D卷积网络架构,将每个像素的3D球面坐标传递到网络中的每一层,实现了对范围图像的高效处理。
此外,作者提出了四种替代内积核心的卷积核,以注入所需的三维信息,并受到最近图形操作方面的进展启发。

图1:现有3D探测器的概述和我们提出的透视点云表示。a)基于三维网格的方法 首先将3D空间体素化,将3D密集结构馈送到3D卷积网络或2D自顶向下网络,并制作最终的 基于3D体素的预测。b)三维图模型在稀疏点云之上构建图神经网络,使 基于点数的预测。c)我们的方法,PPC,直接操作透视范围图像视图,并从像素进行预测。d) 在透视2D视图中利用一组专门的2D卷积层。除了传统的内核外,我们还提出了四种改进的内核 内积核(2D conv)
03 实验结果
通过在Waymo开放数据集上的实验,作者验证了PPC方法的有效性。
该方法在行人检测方面取得了新的最先进结果,并与车辆检测方面的最先进结果相媲美。此外,作者还对复杂度和模型大小与准确性之间的关系进行了分析,表明PPC方法在保持高效性方面具有优势。
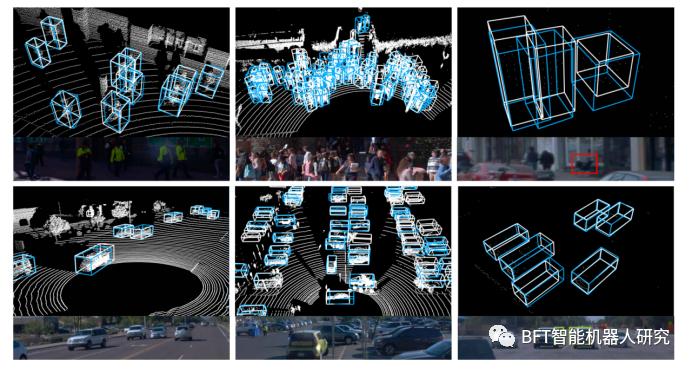
图3:在Waymo开放数据集上,PPC + EdgeConv的行人和车辆检测结果示例。白色 方框代表事实,蓝色方框代表结果。左图:我们的方法在物体接近且大部分可见时表现良好。中心: 也可以处理严重闭塞的大人群。在中间下方的图像中,许多假底片在底面上没有点 盒子。右图:它还可以检测到点变得稀疏的远距离物体。注意在右上方的图片中,行人在 右(在图像上的红色框中突出显示)坐在椅子上。在右下角的例子中,有严重的闭塞(绿框) 前面两辆车后面的两辆车。
尽管PPC方法在3D物体检测方面取得了显著的成果,但仍存在一些挑战。例如,在姿态估计和数据增强方面需要进一步探索。此外,未来的研究可以进一步优化PPC方法的性能和效率,以适应不同的应用场景和推广。
该方法通过利用范围图像和图卷积核,提出了一种高效且强大的3D物体检测方法。实验证明,该方法在行人和车辆检测任务上取得了优异的结果,甚至超过了现有方法。然而,该方法在姿态估计和数据增强方面仍面临一些挑战。未来的研究可以进一步探索这些问题,并进一步优化方法的性能和应用范围。
04 该篇论文的创新点
此篇论文的贡献不仅在于提出了一种新颖的3D物体检测方法,还在于解决了传统方法在处理大范围图像时的低效性问题。
通过直接在透视范围图像上进行操作,避免了将像素投影到3D世界坐标的繁琐过程,并提出了四种改进的卷积核来注入三维信息。这使得方法具备了高效性和强大性能,并且模型的复杂度和大小相对较小。
然而,该方法在姿态估计和数据增强方面仍有一些限制。
在某些场景下,当传感器与世界坐标系有显著的俯仰或横滚时,物体的姿态不再只是绕Z轴的偏航旋转。这对室内场景数据集而言是一个问题,但对于自动驾驶配置来说,通常旋转的激光雷达与世界坐标系保持垂直。
此外,在范围图像形式下,传统的数据增强策略不再适用,因为它们可能会破坏稠密结构。同时,观察到EdgeConv核网络对范围图像中一些合理的策略,如随机翻转和随机点丢弃,不敏感。
05 总结
未来的研究可以致力于解决这些问题。对于姿态估计,可以探索如何在不同场景下准确估计物体的姿态信息,使方法更具鲁棒性。
对于数据增强,需要开发适用于范围图像的新的增强策略,以增加数据的多样性和有效性。此外,还可以探索如何进一步优化和推广PPC方法,使其适用于更广泛的应用领域,如室内场景理解和机器人导航等
标题:
To the Point: Efficient 3D Object Detection in the Range Image With Graph Convolution Kernels
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。