1、总体架构
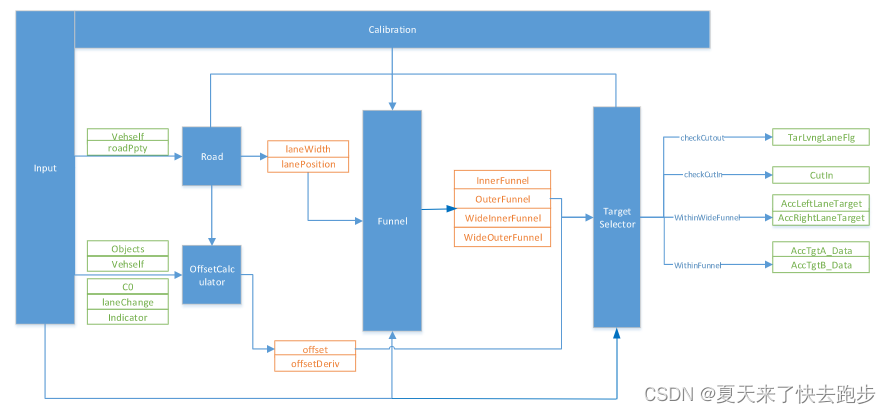
2、漏斗概念(Funnel)
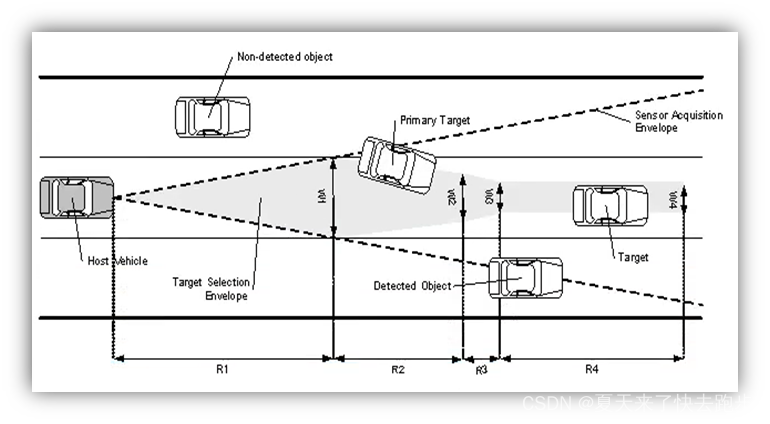
路径漏斗是围绕着自车预测轨迹的一片区域。换言之,漏斗的中心应该根据预测的轨迹方向相应的弯曲。
2.1、普通&略宽漏斗(Normal Funnel & Wider Funnel)
普通漏斗用于选择路径中最近的目标车辆A和次近的车辆B。
更宽的漏斗用于选择路径左侧最近的目标车辆C和路径右侧最近的目标D。
2.2、内部&外部漏斗(Inner Funnel & Outer Funnel)
每个ACC漏斗应有两个envelope。其中,内部漏斗(Inner Funnel)用于目标进入;外部漏斗(Outer Funnel)用于目标离开。
Inner: left=innerLeft + InnerFunnel/2 – lanePosition
Right=-1*( innerRight+ InnerFunnel/2 + lanePosition)
Outer: left=outerLeft + outerFunnel/2 – lanePosition
Right=-1*(outerRight+ outerFunnel/2 + lanePosition)
2.3、影响因素
自车轨迹预测、目标纵向距离、车道宽度