Screen Space Ambient Occlusion - TDA362/DIT223 - Computer Graphics Labs (chalmers.se)![]() https://www.cse.chalmers.se/edu/course/TDA362/tutorials/ssao.html
https://www.cse.chalmers.se/edu/course/TDA362/tutorials/ssao.html
GAMES102在线课程-刘利刚 (ustc.edu.cn)![]() http://staff.ustc.edu.cn/~lgliu/Courses/GAMES102_2020/default.html
http://staff.ustc.edu.cn/~lgliu/Courses/GAMES102_2020/default.html
曲线光顺 离散曲线 三角网格_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1NA411E7Yr/?p=7&vd_source=499555eb1d0a2dc69e44994166c1ede7曲面去噪 采样与剖分_哔哩哔哩_bilibili
https://www.bilibili.com/video/BV1NA411E7Yr/?p=7&vd_source=499555eb1d0a2dc69e44994166c1ede7曲面去噪 采样与剖分_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1NA411E7Yr/?p=10&vd_source=499555eb1d0a2dc69e44994166c1ede7
https://www.bilibili.com/video/BV1NA411E7Yr/?p=10&vd_source=499555eb1d0a2dc69e44994166c1ede7
【3D实践】3D曲率原理及计算(3D-Mesh) - 知乎 (zhihu.com)![]() https://zhuanlan.zhihu.com/p/112294045
https://zhuanlan.zhihu.com/p/112294045
刘利刚《计算机图形学》2020 (ustc.edu.cn)![]() http://staff.ustc.edu.cn/~lgliu/Courses/ComputerGraphics_2020_spring-summer/default.htm
http://staff.ustc.edu.cn/~lgliu/Courses/ComputerGraphics_2020_spring-summer/default.htm
struct MaskByCurvature: INode {
void apply() override {
auto prim = get_input<zeno::PrimitiveObject>("prim");
auto minCur = get_input2<float>("min_curvature");
auto maxCur = get_input2<float>("max_curvature");
auto type = get_input2<std::string>("type");
auto &height = prim->verts.attr<float>("height");
auto &mask = prim->verts.attr<float>("mask");
auto &cur = prim->verts.add_attr<float>("curevature");
auto &gcur = prim->verts.add_attr<float>("gaussianCurvature");
if(type == "gaussianCurvature"){
#pragma omp parallel for
for(int i = 0;i < prim->size();i++){
if (gcur[i] > minCur && gcur[i] < maxCur) {
mask[i] = 1;
}
else{
mask[i] = 0;
}
}
}
if(type == "curvature"){
#pragma omp parallel for
for(int i = 0;i < prim->size();i++){
if (cur[i] > minCur && cur[i] < maxCur) {
mask[i] = 1;
}
else{
mask[i] = 0;
}
}
}
set_output("prim", prim);
}
};
ZENDEFNODE(MaskByCurvature, {
{
{"PrimitiveObject", "prim"},
{"enum gaussianCurvature curvature", "type", "gaussianCurvature"},
{"float", "min_curvature", "1"},
{"float", "max_curvature", "10000"},
},
{
{"PrimitiveObject", "prim"},
},
{},
{"erode"},
});几何体、图像、点云
#include <zeno/zeno.h>
#include <zeno/types/PrimitiveObject.h>
#include <zeno/types/UserData.h>
#include <zeno/types/ListObject.h>
#include <vector>
#include <Eigen/Core>
#include <Eigen/Eigenvalues>
#include <zeno/utils/log.h>
namespace zeno {
namespace {
// 计算点云的曲率
static void computeCurvature(std::shared_ptr<PrimitiveObject> & prim) {
auto &points = prim->attr<vec3f>("pos");
if(!prim->verts.has_attr("curvature")){
prim->verts.add_attr<float>("curvature");
}
auto &cur = prim->verts.attr<float>("curvature");
// 遍历点云中的每个点
for (size_t i = 0; i < prim->size(); ++i) {
auto & p = points[i];
auto & p1 = points[i + 1];
auto & p2 = points[i + 2];
// 计算曲面法线
Eigen::Vector3d v1(p1[0] - p[0], p1[1] - p[1], p1[2] - p[2]);
Eigen::Vector3d v2(p2[0] - p[0], p2[1] - p[1], p2[2] - p[2]);
Eigen::Vector3d normal = v1.cross(v2).normalized();
// 构造协方差矩阵
Eigen::Matrix3d covariance;
covariance.setZero();
covariance += v1 * v1.transpose();
covariance += v2 * v2.transpose();
// 计算特征值和特征向量
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> solver(covariance);
Eigen::Vector3d eigenvalues = solver.eigenvalues();
// 计算曲率
cur[i] = eigenvalues.minCoeff() / eigenvalues.sum();
zeno::log_info("cur[{}]:{}",i ,cur[i]);
}
}
// 计算几何体顶点的曲率
static void computeVertexCurvature(std::shared_ptr<PrimitiveObject> & prim) {
auto &pos = prim->verts;
if(!prim->verts.has_attr("curvature")){
prim->verts.add_attr<float>("curvature");
}
auto &cur = prim->verts.attr<float>("curvature");
// auto &face = prim->tris;
// 遍历每个顶点
for (size_t i = 0; i < prim->verts.size(); ++i) {
// const Vertex3D& vertex = vertices[i];
// std::vector<size_t> neighborFaces;
// 构建顶点的邻域面
std::vector<size_t> neighborFaces;
for (int m = 0;m < prim->tris.size();m++) {
if (prim->tris[m][0] == i || prim->tris[m][1] == i || prim->tris[m][2] == i) {
neighborFaces.push_back(m);
}
}
// 构建邻域面法线矩阵
Eigen::MatrixXd normals(3, neighborFaces.size());
for (size_t j = 0; j < neighborFaces.size(); ++j) {
auto & face = prim->tris[neighborFaces[j]];
auto & vert = prim->verts;
auto & v1 = face[0];
auto & v2 = face[1];
auto & v3 = face[2];
Eigen::Vector3d v12(vert[v2][0] - vert[v1][0], vert[v2][1] - vert[v1][1], vert[v2][2] - vert[v1][2]);
Eigen::Vector3d v13(vert[v3][0] - vert[v1][0], vert[v3][1] - vert[v1][1], vert[v3][2] - vert[v1][2]);
Eigen::Vector3d normal = v12.cross(v13).normalized();
normals(0, j) = normal.x();
normals(1, j) = normal.y();
normals(2, j) = normal.z();
}
// 计算邻域面法线的协方差矩阵
Eigen::MatrixXd covariance = (normals * normals.transpose()) / neighborFaces.size();
// 计算特征值和特征向量
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> solver(covariance);
Eigen::VectorXd eigenvalues = solver.eigenvalues();
// 计算曲率
double curvature = eigenvalues.minCoeff() / eigenvalues.sum();
// cur.push_back(curvature);
cur[i] = curvature;
}
}
// 计算图像的梯度
void computeGradient(std::shared_ptr<PrimitiveObject> & image, std::vector<std::vector<float>>& gradientX, std::vector<std::vector<float>>& gradientY) {
auto &ud = image->userData();
int height = ud.get2<int>("h");
int width = ud.get2<int>("w");
gradientX.resize(height, std::vector<float>(width));
gradientY.resize(height, std::vector<float>(width));
for (int y = 0; y < height; y++) {
for (int x = 0; x < width; x++) {
if (x > 0 && x < width - 1) {
gradientX[y][x] = (image->verts[y * width + x + 1][0] - image->verts[y * width + x - 1])[0] / 2.0f;
} else {
gradientX[y][x] = 0.0f;
}
if (y > 0 && y < height - 1) {
gradientY[y][x] = (image->verts[(y+1) * width + x][0] - image->verts[(y - 1) * width + x])[0] / 2.0f;
} else {
gradientY[y][x] = 0.0f;
}
}
}
}
// 计算图像的曲率
void computeCurvature(std::shared_ptr<PrimitiveObject> & image, const std::vector<std::vector<float>>& gradientX,
const std::vector<std::vector<float>>& gradientY) {
int height = gradientX.size();
int width = gradientX[0].size();
if(!image->verts.has_attr("curvature")){
image->verts.add_attr<float>("curvature");
}
auto &cur = image->verts.attr<float>("curvature");
// curvature.resize(height, std::vector<float>(width));
for (int y = 0; y < height; y++) {
for (int x = 0; x < width; x++) {
float dx = gradientX[y][x];
float dy = gradientY[y][x];
float dxx = 0.0f;
float dyy = 0.0f;
float dxy = 0.0f;
if (x > 0 && x < width - 1) {
dxx = gradientX[y][x + 1] - 2.0f * dx + gradientX[y][x - 1];
}
if (y > 0 && y < height - 1) {
dyy = gradientY[y + 1][x] - 2.0f * dy + gradientY[y - 1][x];
}
if (x > 0 && x < width - 1 && y > 0 && y < height - 1) {
dxy = (gradientX[y + 1][x + 1] - gradientX[y + 1][x - 1] - gradientX[y - 1][x + 1] + gradientX[y - 1][x - 1]) / 4.0f;
}
cur[y * width + x] = (dxx * dyy - dxy * dxy) / ((dxx + dyy) * (dxx + dyy) + 1e-6f);
// curvature[y][x] = (dxx * dyy - dxy * dxy) / ((dxx + dyy) * (dxx + dyy) + 1e-6f);
}
}
}
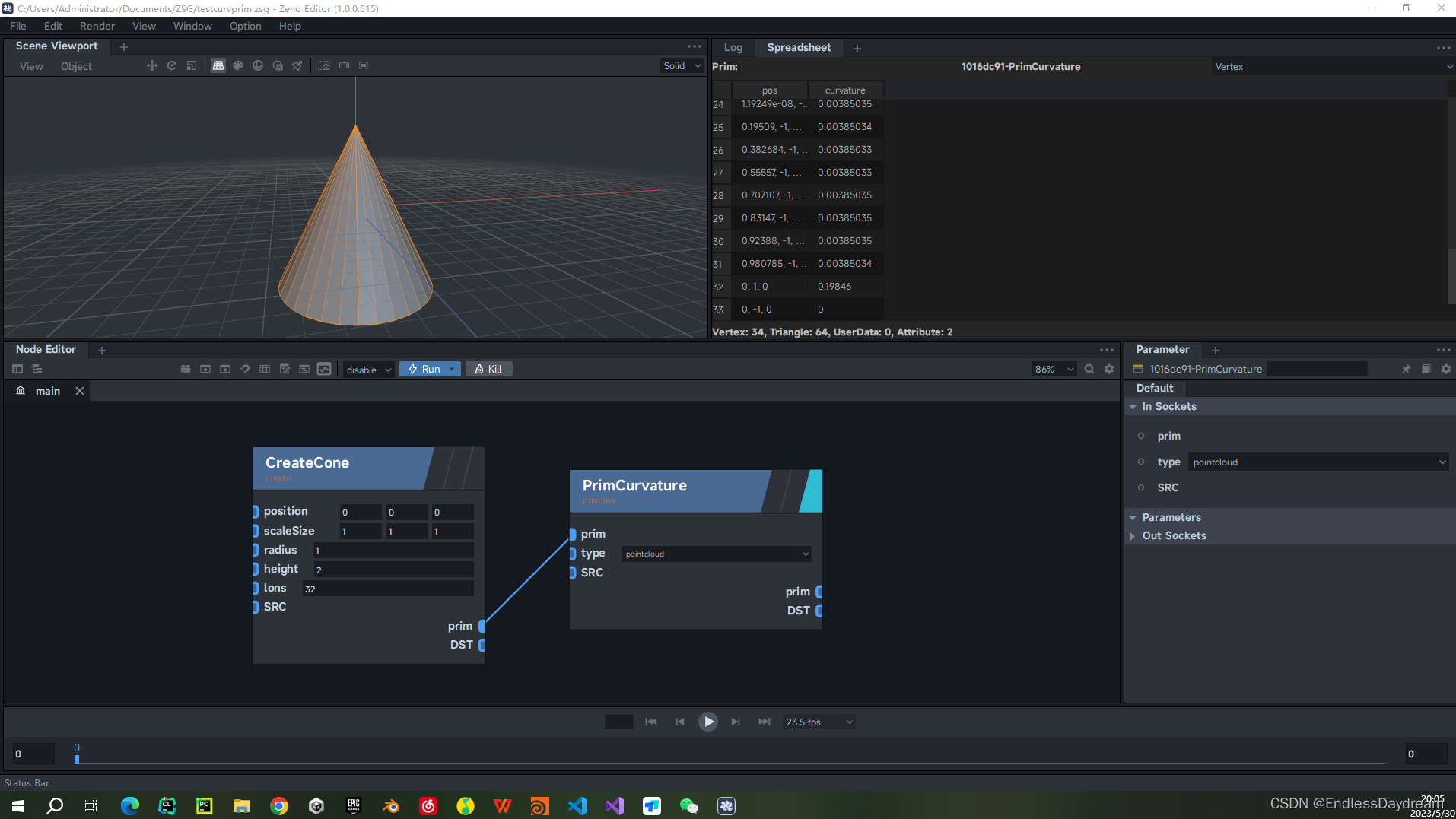
struct PrimCurvature: INode {
void apply() override {
auto prim = get_input<zeno::PrimitiveObject>("prim");
auto type = get_input2<std::string>("type");
if(type == "object"){
computeVertexCurvature(prim);
}
else if(type == "pointcloud"){
computeCurvature(prim);
}
else if(type == "image"){
auto &ud = prim->userData();
int w = ud.get2<int>("w");
int h = ud.get2<int>("h");
std::vector<std::vector<float>> gx(h, std::vector<float>(w, 0));
std::vector<std::vector<float>> gy(h, std::vector<float>(w, 0));
computeGradient(prim,gx, gy);
computeCurvature(prim,gx,gy);
}
set_output("prim", prim);
}
};
ZENDEFNODE(PrimCurvature, {
{
{"PrimitiveObject", "prim"},
{"enum object image pointcloud", "type", "object"},
},
{
{"PrimitiveObject", "prim"},
},
{},
{"primitive"},
});
}
}struct PrimCurvature: INode {
void apply() override {
auto prim = get_input<zeno::PrimitiveObject>("prim");
auto type = get_input2<std::string>("type");
int n = prim->verts.size(); // Number of vertices
int dim = 3; // Dimensionality (3D)
Eigen::MatrixXd V(n, dim);
for (int i = 0; i < n; ++i) {
V.row(i) << prim->verts[i][0], prim->verts[i][1], prim->verts[i][2];
}
int m = prim->tris.size(); // Number of faces
int vertices_per_face = 3; // Number of vertices per face
Eigen::MatrixXi F(m, vertices_per_face);
for (int i = 0; i < m; ++i) {
// Assign vertex indices to each row of F
F.row(i) << prim->tris[i][0], prim->tris[i][1], prim->tris[i][2];
}
if(type == "gaussianCurvature"){
Eigen::VectorXd K;
igl::gaussian_curvature(V, F, K);
prim->verts.add_attr<float>("gaussianCurvature");
for(int i = 0;i < prim->verts.size();i++){
// prim->verts.attr<float>("gaussianCurvature")[i] = K[i];
prim->verts.attr<float>("gaussianCurvature")[i] = K(i,0);
}
}
else if(type == "curvature"){
Eigen::MatrixXd H;
// igl::curvature(V, F, H);
prim->verts.add_attr<float>("curvature");
for(int i = 0;i < prim->verts.size();i++){
prim->verts.attr<float>("curvature")[i] = H(i,0);
}
}
set_output("prim", prim);
}
};
ZENDEFNODE(PrimCurvature, {
{
{"PrimitiveObject", "prim"},
{"enum gaussianCurvature curvature", "type", "gaussianCurvature"},
},
{
{"PrimitiveObject", "prim"},
},
{},
{"primitive"},
});