1. 前言
- 欢迎大家阅读2345VOR的博客【D435i深度相机YOLO V5结合实现目标检测】🥳🥳🥳
- 2345VOR鹏鹏主页: 已获得CSDN《嵌入式领域优质创作者》称号👻👻👻,座右铭:脚踏实地,仰望星空🛹🛹🛹
- 本文章属于《Ubuntu学习》和《ROS机器人学习》
Ubuntu环境搭建
【经典Ubuntu20.04版本U盘安装双系统教程】
【Windows10安装或重装ubuntu18.04双系统教程】
【Ubuntu同步系统时间】
【Ubuntu中截图工具】
【Ubuntu安装QQ】
【Ubuntu安装后基本配置】
【Ubuntu启动菜单的默认项】
【ubuntu系统中修改hosts配置】
【18.04Ubuntu中解决无法识别显示屏】
【ROS 开发神器 Visual Studio Code 的安装和设置】
【基于Ubuntu18.04+Melodic的realsense D435安装】
【Ubuntu18配置Anaconda深度学习环境】
【D435i深度相机YOLO V5结合实现目标检测】
【UR3系统升级到CB3.12附带URcap1.05】
ROS学习笔记
【1. Ubuntu18.04安装ROS Melodic】
【2. 在Github上寻找安装ROS软件包】
【3. 初学ROS,年轻人的第一个Node节点】
【4. ROS的主要通讯方式:Topic话题与Message消息】
【5. ROS机器人的运动控制】
【6. 激光雷达接入ROS】
【7. ROS 中的 IMU 惯性测量单元消息包】
在使用Universal_Robots_ROS_Driver驱动真实机械臂前,需要在示教器上配置网络连接,并且安装urcap。

1.1 版本说明
使用的版本是 Ubuntu18.04 + ROS melodic + UR3(CB3.12)
驱动是Universal_Robots_ROS_Driver
1.2 UR机械臂学习
前期可以围绕这个官网学习UR机械臂的基础知识,了解机器人结构与功能,方便后期愉快的玩耍!
- cb3网络交互课程: https://academy.universal-robots.com/cn/免费网络课程/cb3-网络课程/
- 【UR机械臂CB3 网络静态课程 】:https://blog.csdn.net/vor234/article/details/129616471
2 示教器开机
- 点击按钮1开机
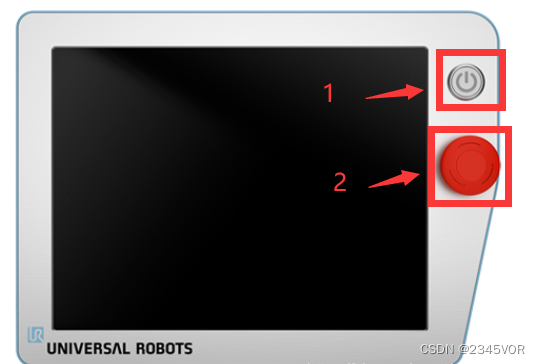
- 为示教器急停按钮,按下后急停, 开机后,旋转急停按钮,将急停按钮提起
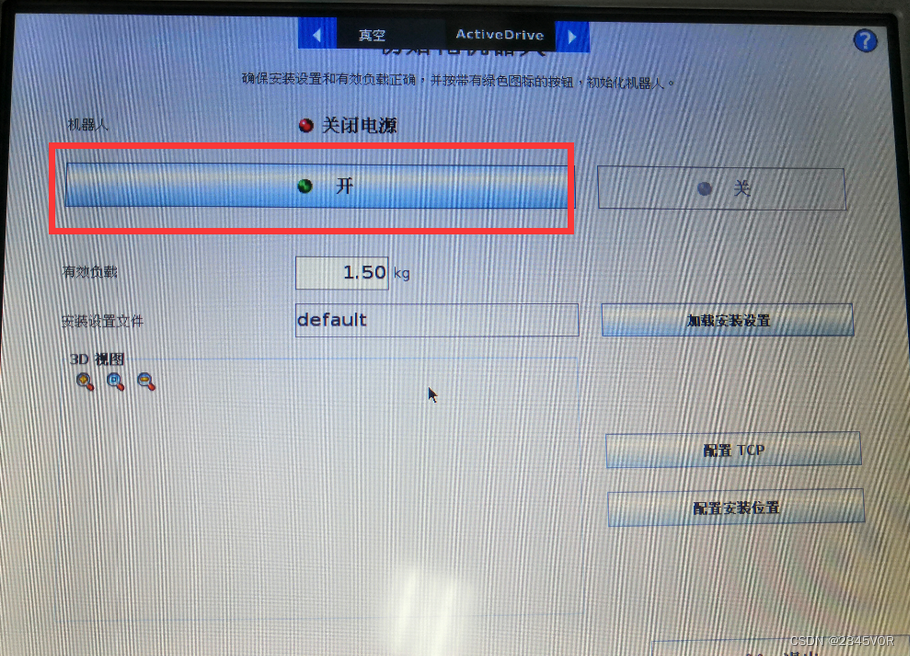
- 然后转到初始化屏幕,开启机械臂,然后启动制动器,然后点击右下角确定
3. 配置电脑IP
打开电脑设置,关闭wifi,设置有线连接

点击+号,添加
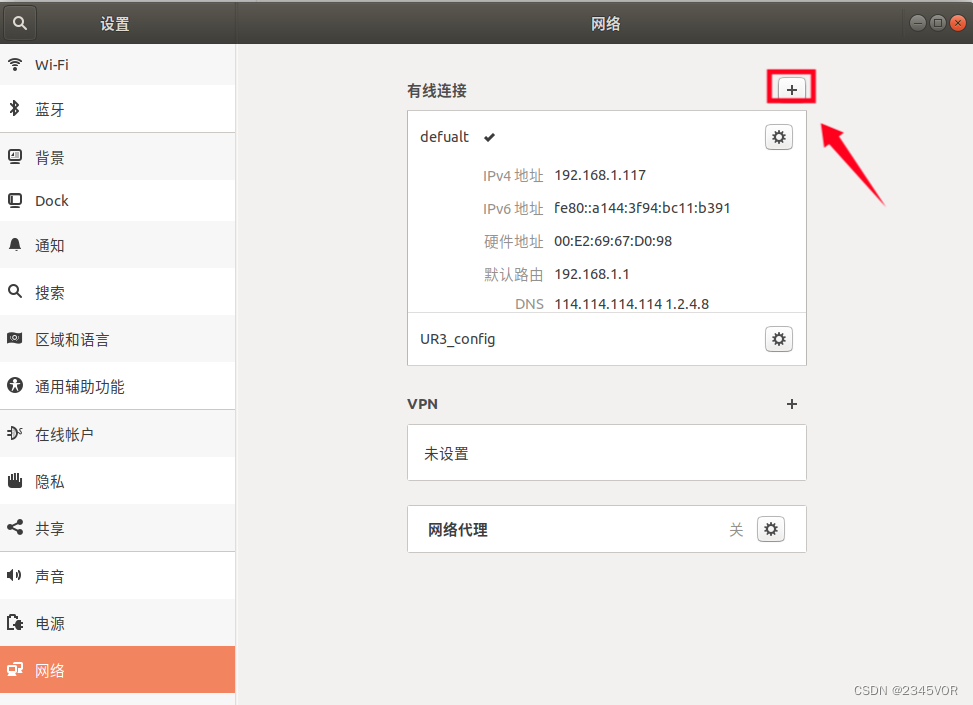
设置如下
 IPV4采用手动指定
IPV4采用手动指定
电脑ip地址:
192.168.56.100
子网掩码:255.255.255.0
网关:192.168.56.1
DNS:8.8.8.8
也可以配置身份,我设置为UR3_config

最后应用一下
这样就可以通过点击勾选,切换两种不同网络配置
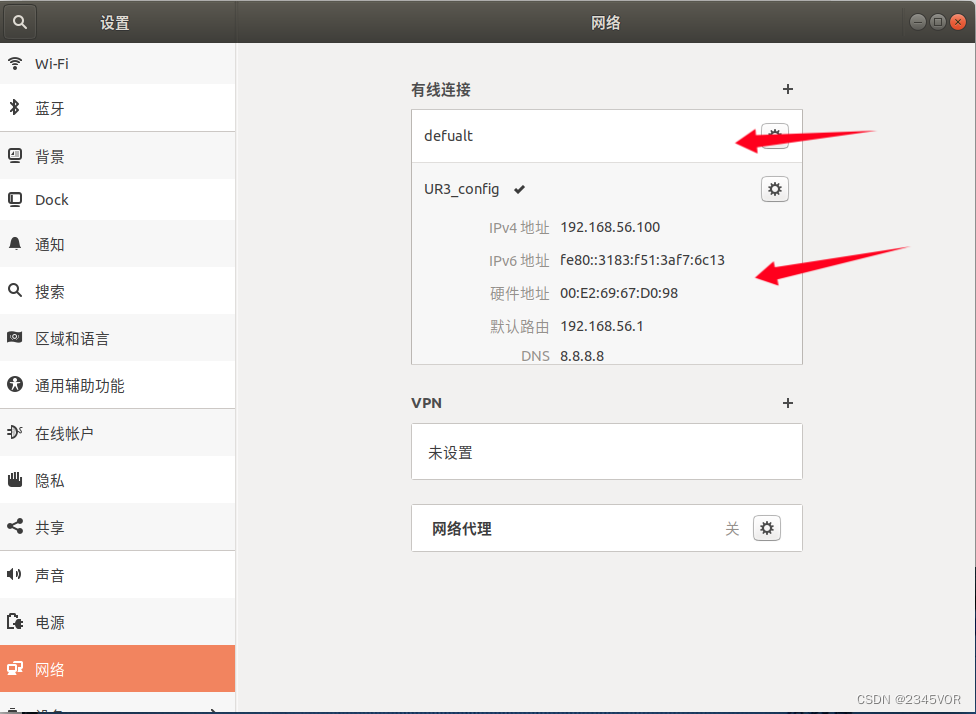
default:默认网线配置
UR3_config:与UR3通讯配置
4. 配置示教器
下一步是确保正确配置硬件(控制计算机和机器人)可以相互通信。
注意:默认情况下,Universal Robot 的网络功能处于禁用状态。
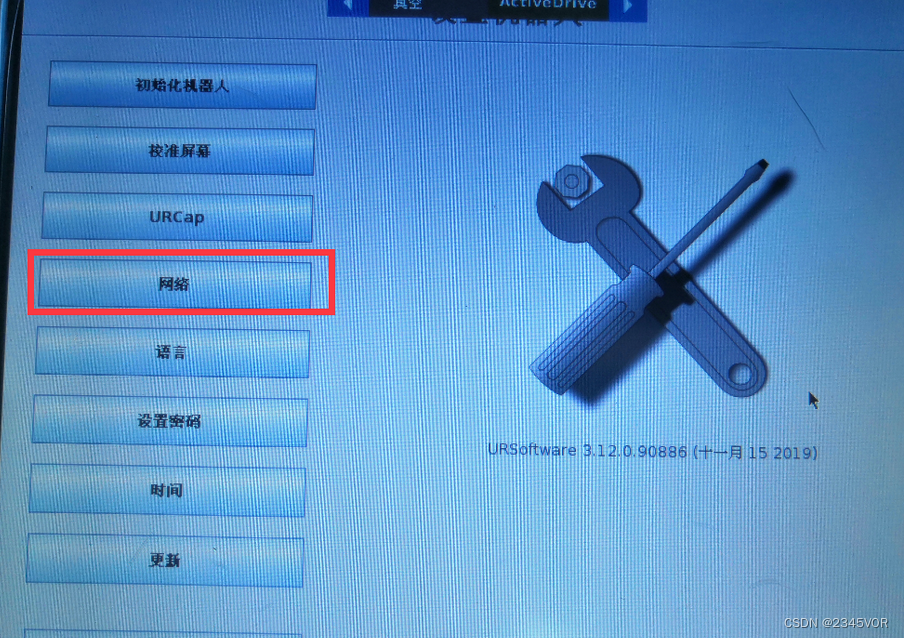
4.1 打开网络设置
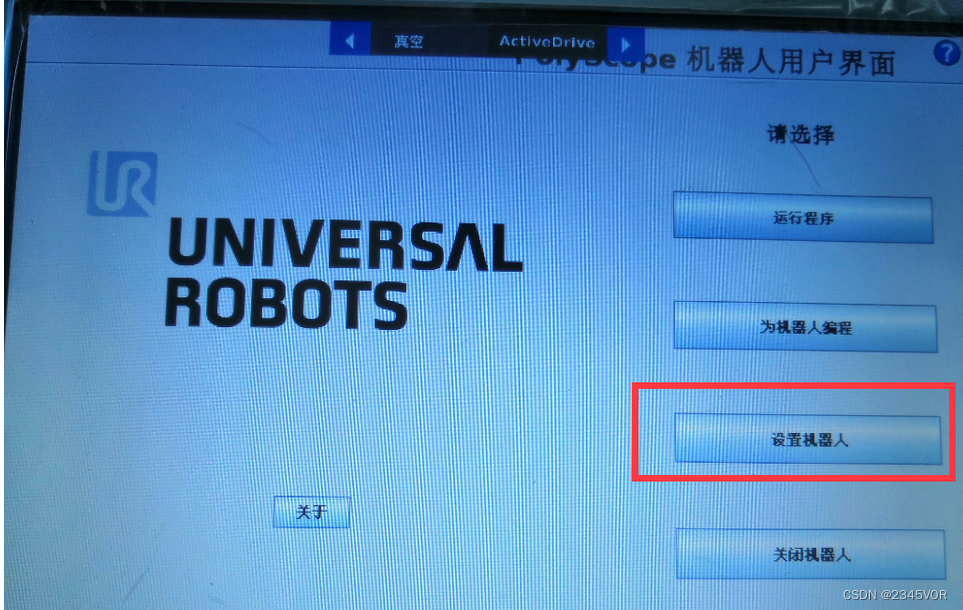
要启用网络连接,需使用UR的示教器导航至设置机器人 --> 设置 网络 -->选择静态地址–>然后设置网络ip地址–>然后应用
4.2 设置示教器IP
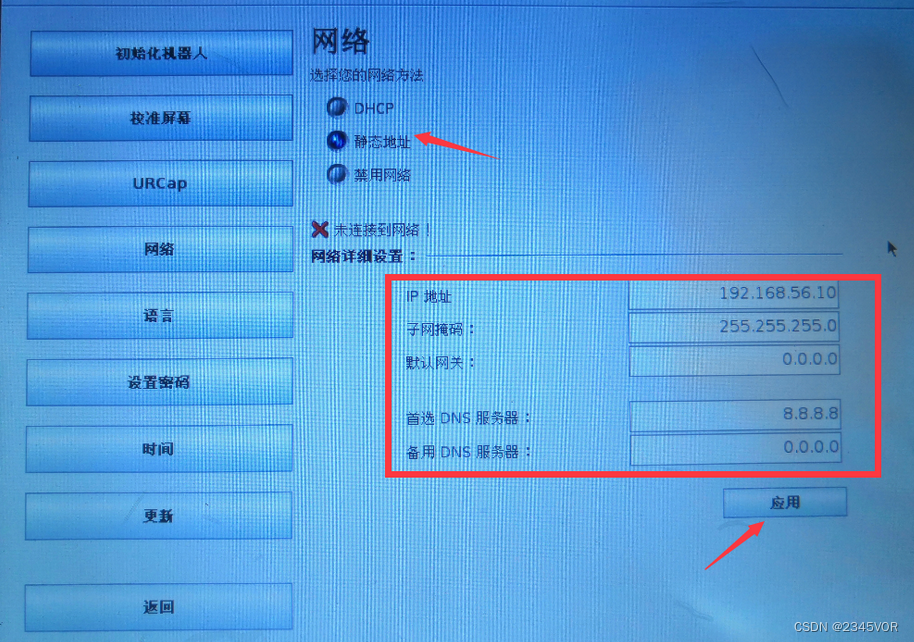
采用静态地址
UR3机器人ip地址:
192.168.56.10
子网掩码:255.255.255.0
默认 网关:0.0.0.0
首选DNS:8.8.8.8
备用DNS:0.0.0.0
这是原来的dns服务器,也需要修改成上面所示

然后通过网线连接控制箱和电脑
控制箱的网线接口在箱子下面
上面所有的设置完成之后,打开电脑终端。ping一下ur机械臂的ip地址,成果则说明连接成果,否则可以重启试试
# 我的电脑ip地址是192.168.56.100
# 我的ur机械臂ip地址是192.168.56.10
ping 192.168.56.10
5. urcap配置
如果采用教程【UR3系统升级到CB3.12附带URcap1.05】,那就自带有,如果没有请看接下来操作
5.1 urcap拓展包安装
要在ros上使用ur_robot_driver控制真实的ur机械臂运动,需要在ur机器人上安装externalcontrol-1.05.urcap,它类似一个插件,接受ros端的消息再控制ur3运动。
externalcontrol urcap安装教程
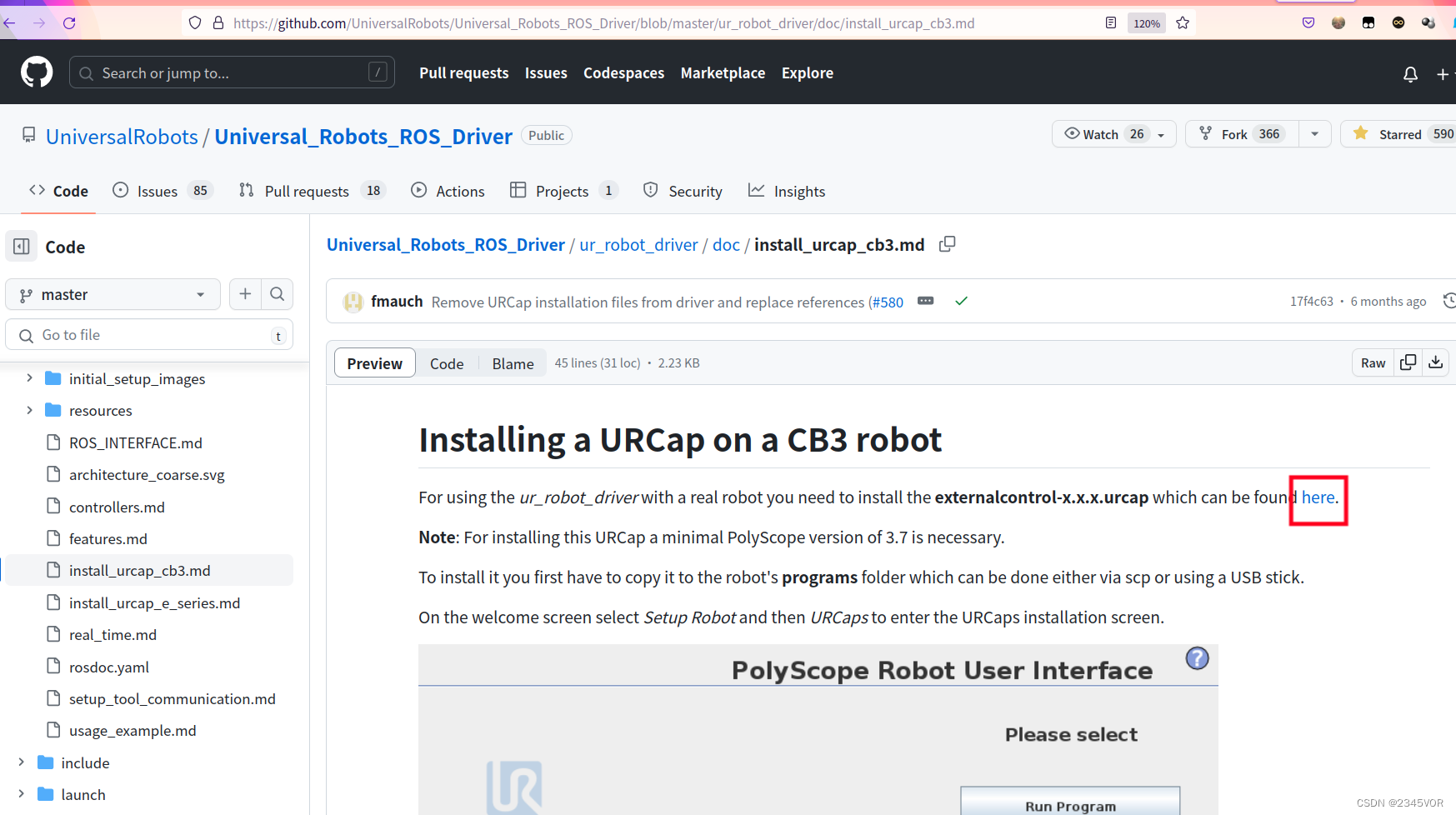 点击here
点击here
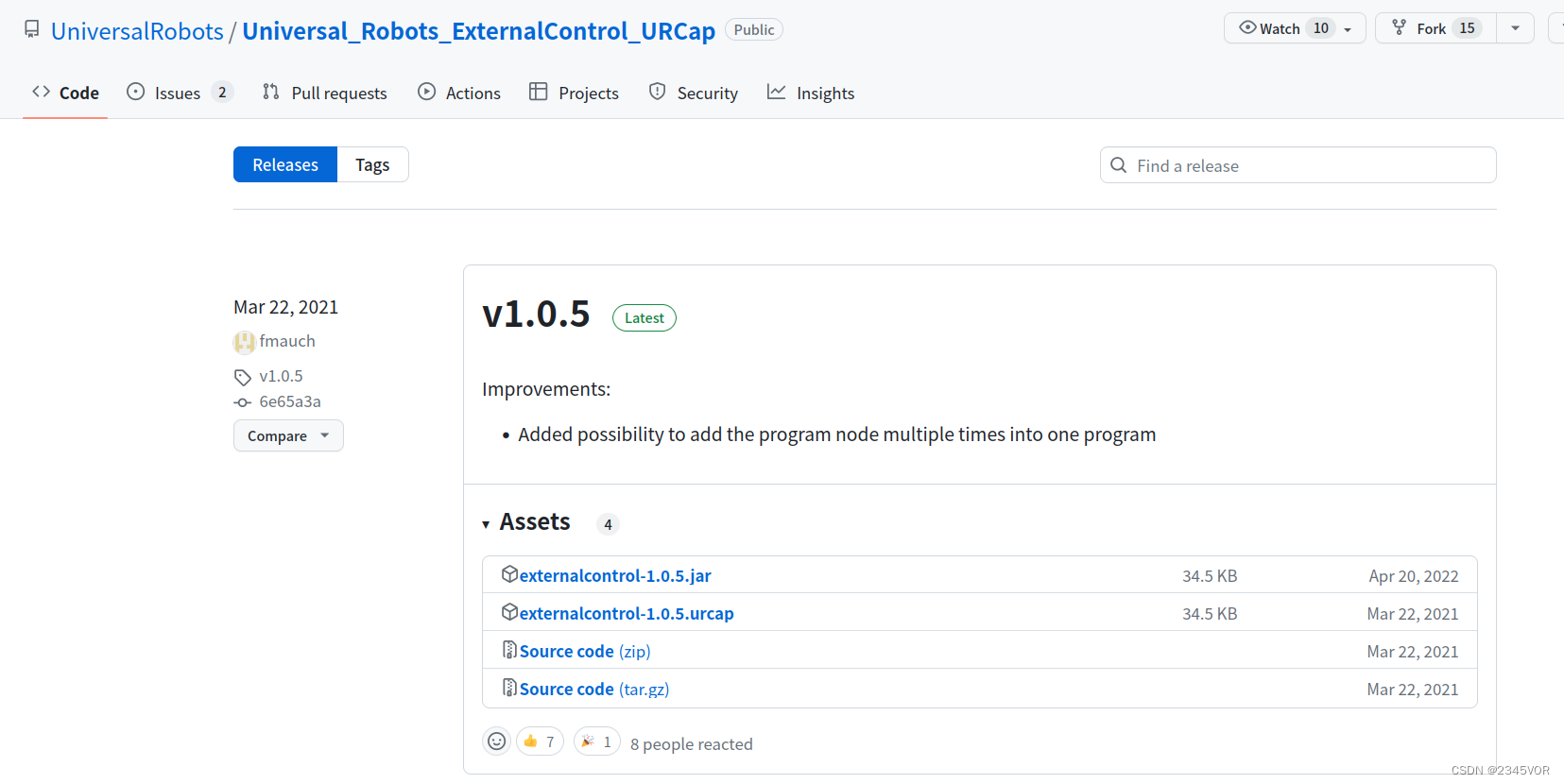
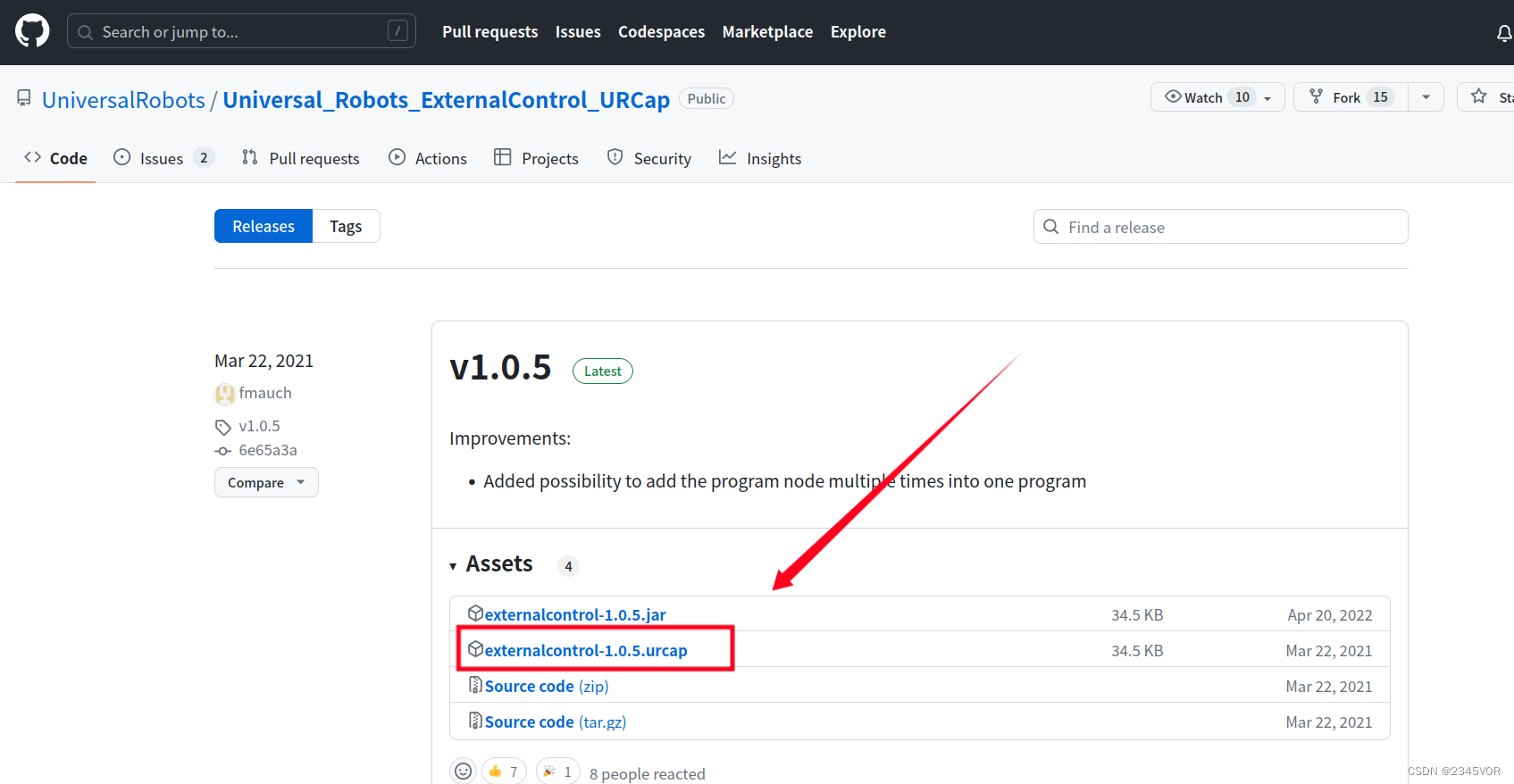
下载的externalcontrol.urcap文件拷贝到U盘然后插到示教器上。
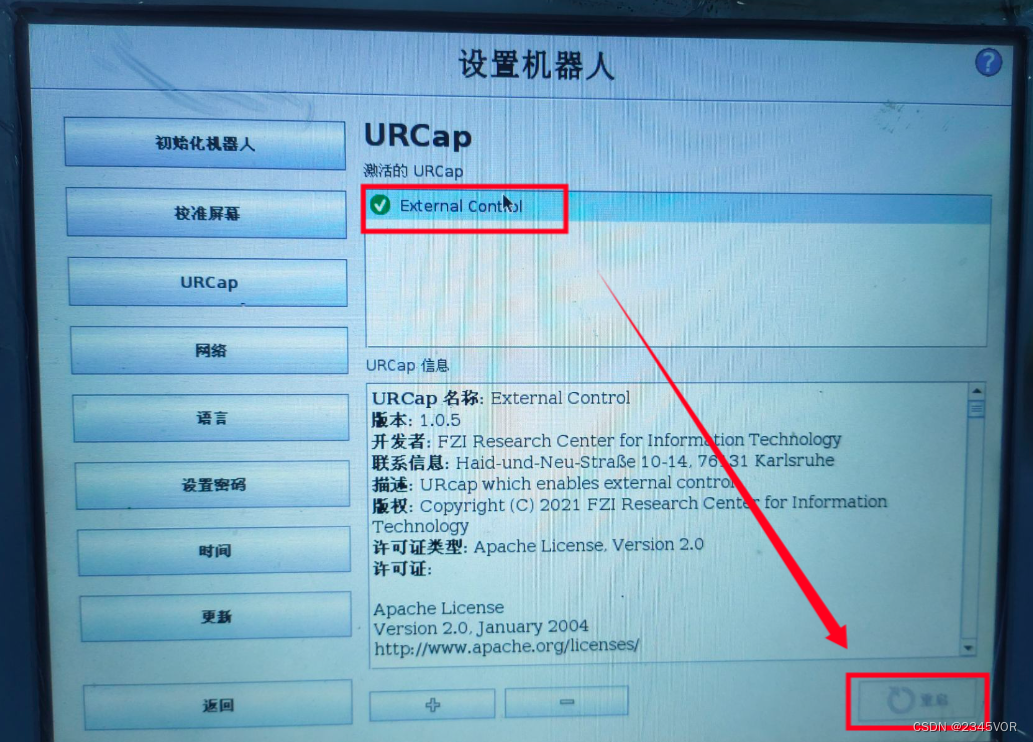
在示教器的设置机器人中,点开URCap,找到externalcontrol-1.05.urcap,选中,然后点击重启。
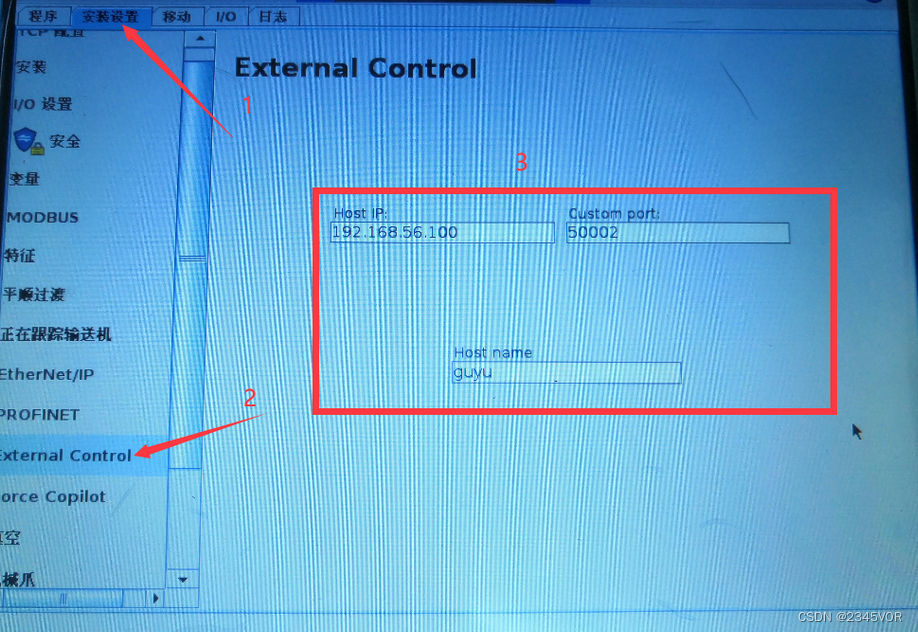
5.2 在示教器中设置电脑ip
创建 空程序 --> 点击左上角安装设置 --> 选择external contral --> 填写电脑ip和电脑主机名
查看/修改电脑主机名的方法:
# 查看主机名
hostname
# 临时修改主机名(重启后恢复原主机名)
sudo hostname <computer_name>
# 永久修改主机名(修改后需要重启生效)
sudo gedit /etc/hostname
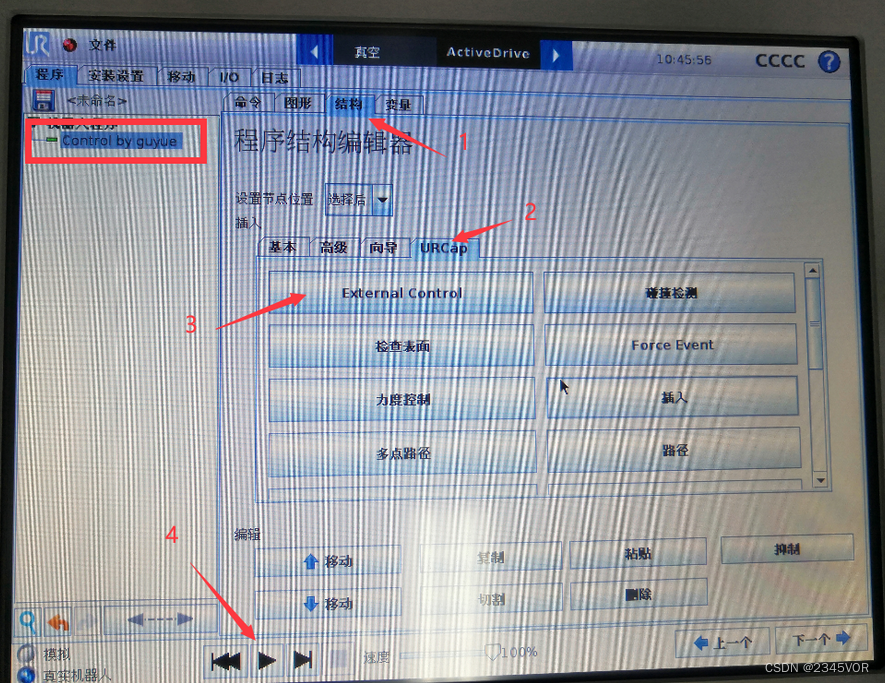
5.3 示教器内编程
如图,在完成上一步后,回到程序页面
点击结构–> urcap --> external control
完成后可以看到左侧程序树的地方显示“control by 主机名”
然后点击下方的启动程序,就开始运行
注意: 在使用ros与ur机械臂通信时,需要先在电脑上启动bringup,再在示教器上点击运行按键启动程序
6. 总结
本文学习了【UR机械臂ros通讯前的示教器网络配置】,我会作UR3的抓取实验,后期会分享更多有趣的操作从而实现对外部世界进行感知,充分认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。✨✨✨