来源:投稿 作者:小灰灰
编辑:学姐
论文标题:GNSS Multipath Detection Using a Machine Learning Approach
论文链接:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=8317700
摘要
在高度城市化地区实施先进智能交通系统的挑战之一是全球导航卫星系统(GNSS)接收机定位精度不足。多径Multipath和非视线(NLOS)效应严重恶化了GNSS定位性能。本文旨在通过有监督机器学习训练分类器,将GNSS伪距测量分为三类:clean, multipath and NLOS。从全球导航卫星系统原始数据中获得或计算出的若干特征进行了评估。本文还提出了一种新的特征来表示伪距测量值和多普勒频移测量值之间的一致性。根据实验结果,使用由所提出的特征和接收信号强度训练的支持向量机(SVM)分类器可以达到约75%的分类精度
介绍
智能出行是智能城市发展的六大组成部分之一。全球导航卫星系统(GNSS)本地化对于不同应用的智能移动性至关重要,包括行人和车辆导航、车队管理、道路交通监控和分析、道路用户收费、非正常驾驶检测等。本文主要研究自动驾驶应用中的车辆和行人定位。
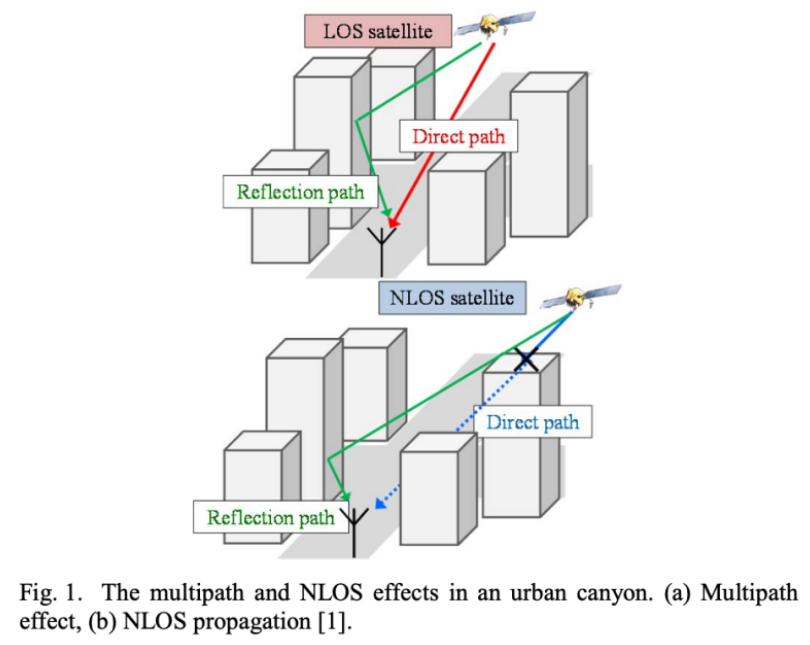
随着行人对车辆(P2V)和车辆对车辆(V2V)通信的成熟和普及,行人和自动车辆之间的碰撞避免可能在未来实现。当前智能避碰的瓶颈之一是行人和车辆的定位精度。一般来说,GNSS接收机是向载波提供绝对定位信息的最常用设备/芯片。目前,在高速公路、高速公路、郊区和农村等卫星观测条件较好的地区,全球导航卫星系统的定位性能非常令人满意。其在城市地区的定位表现则是另一回事。密集建筑环境中臭名昭著的多径效应正在显著降低GNSS定位精度。多径效应来源于高层建筑和摩天大楼对卫星信号的反射和衍射。它很容易将全球导航卫星系统的精度降低到几十米。与多径效应相比,更具破坏性的现象是非视线(NLOS)接收。多径和nlos之间的差异可以如图1所示。多径包含视线(LOS)和反射信号,而非直视仅包含后者。
使用复杂的接收机相关器设计可以大致减轻多径效应。相关器设计的原则是比较代码跟踪环路中的早期、提示和晚期信道。换句话说,它将直接信号与反射信号进行比较。不幸的是,由于nlos系统只包含反射信号,因此这种设计根本不能减轻nlos的影响。因此,关注非nlos探测和缓解的研究正在增加。nlos探测方法可分为天线、高级接收机算法、传感器集成、3D建模和机器学习。后两种方法的细节将在下一节中讨论。
本文旨在开发一种基于机器学习算法的视距、多径、非视距分类器。成功的机器学习的关键是识别重要特征。因此,对从全球导航卫星系统原始数据获得或计算的几个变量进行了评估。原始数据表示伪距、载波噪声比、多普勒频移和载波相位测量值,这些测量值可以作为RINEX格式存档[16]。根据谷歌最近发布的公告,所有配备Android Nougat OS的新智能手机都可以支持上述测量结果的输出。也就是说,可以假设从GNSS原始数据中提取的潜在特征能够从大多数新的GNSS设备中获得。
本文的贡献点:
本文的新颖之处不仅在于对clean and biased measurements 进行分类,还在于进一步区分distinguish multipath and NLOS 。
相关理论
-
A:GNSS with 3D buildings
由于智能城市的兴起,3D城市模型得到了迅速发展,并广泛应用。最近处理多径和非视 距的研究方向是利用3D映射,称为3D映射辅助(3DMA)定位方法。最著名的3DMA方法之一是阴影匹配。它利用建筑物边界,从三维城市模型预测卫星能见度。研究人员还专注于使用增强的3D数字地图提高GNSS定位精度。在过去几年中,人们提出使用非视距信号,而不是减轻或排除非直瞄的影响。研究人员建议将光线跟踪模拟与基于假设的定位方法相结合,以进一步提高定位精度。这些基于距离的3DMA使用光线跟踪技术来估计NLOS信号的反射路径。然后,该路线用于校正偏差伪距测量的非直瞄延迟,最后将行人应用的定位精度进一步提高至约5米[25]。然而,基于距离的方法由于光线跟踪造成的计算量大以及无法实时访问三维建筑模型,因此不容易适应低成本接收机。本文将在离线阶段使用光线跟踪模拟和三维建模,将测量标记为视线、多径和非视距。
-
B:GNSS using machine learning
使用机器学习促进全球导航卫星系统本地化的讨论始于2013年。第一个想法是根据卫星数量、精度稀释(DOP)、接收信号强度和接收器速度的组合,将定位精度划分为三个精度带。提出了一种基于伪距残差的Wilcoxon范数回归器来检测有偏伪距测量。研究人员还选择仰角和方位角作为机器学习的关键特征,以缓解静态应用的多径效应。从接收机信号处理阶段的相关器中提取变量,对GNSS接收机的六种典型场景进行分类。2016年,机器学习检测非视距的想法也在Nav2Nav应用程序中实现,这被称为车辆协同导航。决策树方法用于根据接收机信号强度和仰角对LOS和NLOS进行分类。在本文中,我们研究了相关工作中使用的几个特性。此外,在支持向量机(SVM)训练的分类器中,多普勒频移的测量值也被用作关键特征。
GNSS数据收集和标记
为了记录大量的多径和非视距数据,我们在香港的Hung Hom,密集建筑区进行了静态实验。图2显示了收集数据的环境。天线装有一根棍子,放在窗外,用于长时间的数据采集。商用全球导航卫星系统接收器u-blox M8部署用于收集多径和非视距数据。收集24小时有偏差的GNSS原始测量值。在这个数据集中,几乎所有的测量都受到附近建筑物的影响。换句话说,这个城市数据集只包含多路径和非视距测量。

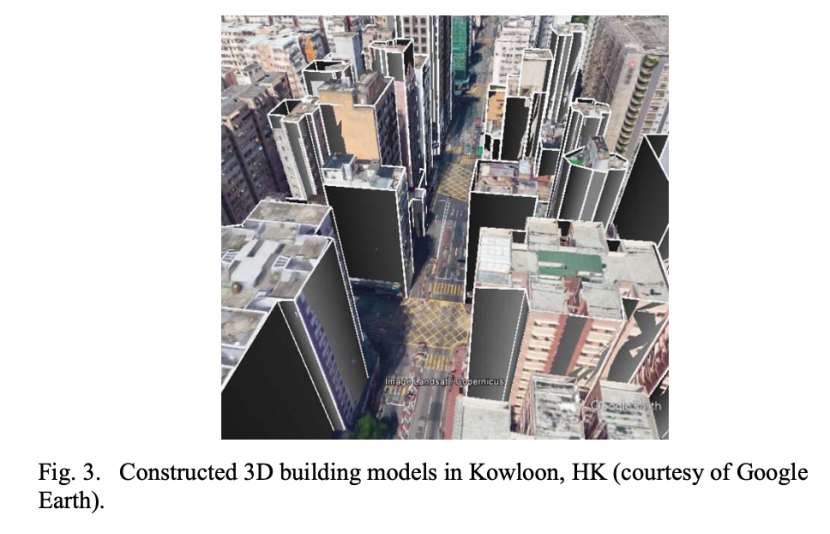
由于隐式信号传输,从城市数据中标记多径和非视距信号具有挑战性。我们的想法是实现光线跟踪模拟,以识别信号传输类型。GNSS中光线跟踪的原理是使用已知的卫星、反射器和接收器几何体来跟踪直射和反射路径。GNSS多径模拟中光线跟踪。卫星位置可以通过广播星历表来估计。从三维建筑模型中搜索反射器。我们通过参考Google Earth中的3D模型,手动构建地区的基本3D建筑模型,如图3所示。
在标记阶段,在实验中静态设置接收器,以便容易确定接收器位置的地面真相。地面实况由香港政府土地部门提供的地形图给出。这张地图的分辨率是20厘米。每个点都有精确的二维坐标。高度由从谷歌获得的地形高度加上设备高度得出。一旦知道卫星、反射器和接收器的位置,就可以进行光线跟踪模拟。
图4显示了城市数据集的天空图。该天空图是使用光线跟踪和三维建筑模型生成的。图4中的灰色区域表示根据建筑模型,直接传输被阻断。显然,许多非视距传播都是在有偏差的数据集中接收的。

图4.香港收集的数据中包含周边建筑信息的天空图。卫星轨道的颜色表示接收信号强度,颜色越红,接收的信号强度越高。
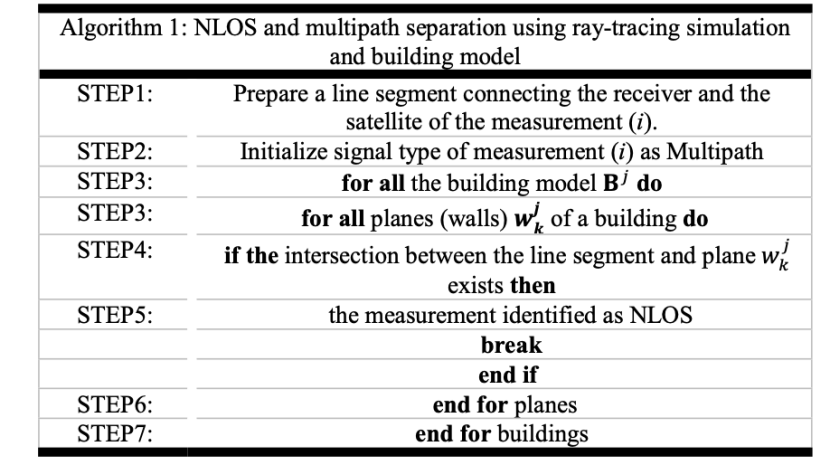
NLOS识别算法描述如下。
关于LOS GNSS数据,香港土地部门建立了一个名为SatRef的GNSS网络,为香港用户提供差分修正。我们采用SatRef站存档的RINEX数据作为LOS数据,因为参考站位于观测条件良好的地方。24小时的clean 数据也用于训练分类器。
观察图4,我们可以发现低仰角NLOS信号的接收信号强度也较低。也就是说,这意味着可以使用不同变量的组合来识别非视距。下一节讨论可用于分类度量类型的变量。
分类LOS/NLOS/多径测量的特点
LOS信号仅包含从卫星到接收器的直接信号。NLOS接收仅表示接收器接收到的信号反射。多径包含直接信号和反射信号。根据其差异的性质,以下变量可能是分离测量值的提示。
接收信号强度,RSS接收信号强度通常用载波噪声比(C/N0)表示。根据信号传播理论,额外的传播和反射将增加信号传播损失。因此,它是用于减轻多径效应的最常用变量之一。RSS数据可以从NMEA和RINEX数据格式轻松获得。
接收信号强度变化率:由于接收机跟踪环路的原理,如果天线保持静止,多径和非视距的接收信号强度可能会增加,天线的速度与多径效应引起的GNSS定位误差密切相关。
Pseudorange residue :最小二乘估计是实现GPS定位原理三角测量的基本方法。通过最小二乘估计,可以使用(1)估计接收机状态。

r是接收器状态,包括接收机和GPS系统时间之间的三维位置和时钟偏移。表示伪距测量。G表示由卫星和接收器之间的单位LOS矢量组成的测量矩阵。伪距测量值之间的不一致性可以表示
和计算方式为:

如前一项研究所示,如果测量次数足够,伪距残差可以作为排除多径和NLOS信号的指标。
增量伪距和伪距速率之间的差异:
该变量用于检查伪距和多普勒频移测量值之间的一致性。伪距和多普勒频移分别由码和频率/载波跟踪环路估计。也就是说,如果忽略它们微不足道的互相关,它们是独立的。Delta伪距表示两个时代之间伪距的变化。其计算方法为:
其中上标i和下标k分别表示卫星索引和epoch索引。伪距速率也表明了两个时代之间伪距的变化。根据多普勒效应原理,可通过多普勒频移计算得出:

关于上述变量的标记数据如下图所示。顶部面板上的数字清楚地表明,与其他数据相比,大多数clean的LOS数据具有较强的接收信号强度。多径的C/N0在25至40 dB Hz的范围内。非视距的C/N0很少大于35 dB Hz,主要在25至30 dB Hz之间。就C/N0的变化率而言,多径没有明显的特征,它广泛分布在-20至20 dB Hz之间。非视距频率分布在-10至10 dB Hz之间。就伪距残差而言,LOS值要小得多,因为它们与大多数接收到的测量值一致。显然,非视距在正值上的分布大于负值。这一现象是由于非视距比视距多了一条航路。因此,其伪距误差趋于正值。从下栏可以看出,视距信号在伪距和多普勒频移测量值之间的一致性优于多径和视距信号。与多径和视距相比,它们在-10至10米的范围内相似。然而,非视距在delta伪距和伪距速率之间有更大的差异范围。这种差异将在下一节中显示。

SUPPORT VECTOR MACHINE
-
A:Algorithm and Toolbox 回归量、y类和特征x表示为:

表示根据应用程序预定义的可操作函数。w表示回归变量的参数,即机器学习方法估计的参数。SVM是一种用于分类的有监督机器学习技术。它的回归元可以理解为用于区分不同类别的超平面。SVM的超平面可以描述为:

表示超平面的边界。如果边缘很小(即几乎为零),则意味着经过训练的分类器无法根据给定的特征清楚地分离类。为了得到给定的方程(6),其优化可表示为:

r表示正则化参数,用于平衡模型复杂度和训练误差之间的平衡。最后,它可以表示为:

其中:

表示内核函数,
可以使用复杂的工具箱进行评估, 本文Matlab提供的支持向量机。在默认设置中,线性内核,

还有其他设置可以更好地适应全球导航卫星系统的视线、多径和非视距分类。本文使用Matlab的默认设置快速演示SVM对干净和有偏GNSS伪距测量进行分类的有效性。
-
B. Classifaction Result
为了避免训练数据集的不平衡问题,使用相同数量的LOS、多径和NLOS测量。使用了85365个样本。该样本将分为10组进行10倍分类。表一比较了使用第四节所列单一特征的分类精度。
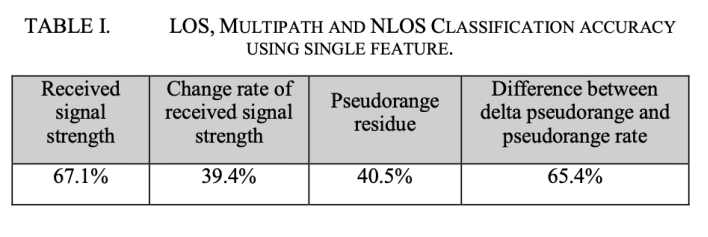
如表I所示,使用伪距残差特征的分类精度小于50%。在城市峡谷深处,单历元数据中非直瞄和多径的数量可能大于直瞄。这导致伪距残差不能作为区分GNSS接收信号类型的一个明显特征。使用RSS的更改率作为特征的准确性低于40%。RSS的变化率可以成功地分离干净和有偏测量。然而,它没有分离多径和非直瞄的能力。使用其余两个特征的分类结果可以达到65%以上。图6和图7从接收信号强度的角度显示了标记数据,以及增量伪距(来自伪距测量)和伪距速率(来自多普勒频移)之间的差异。
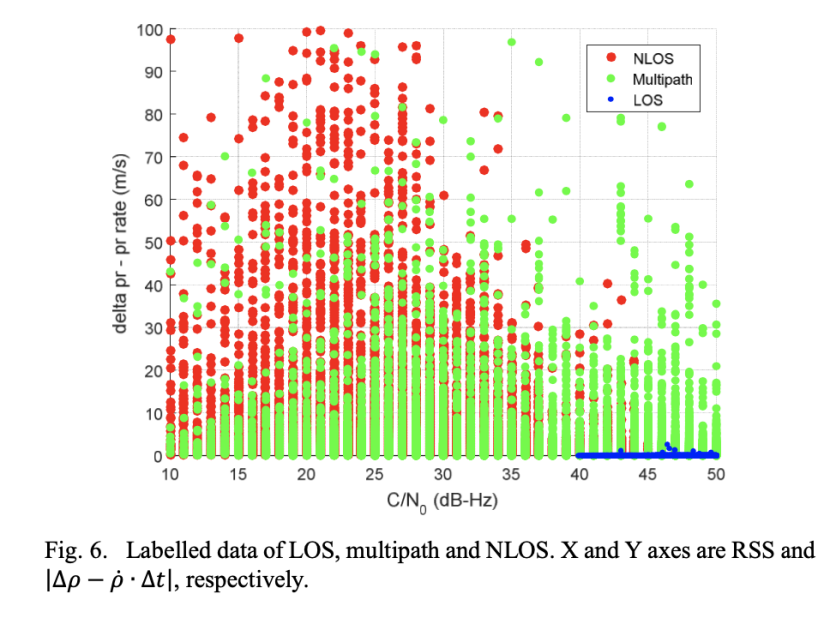
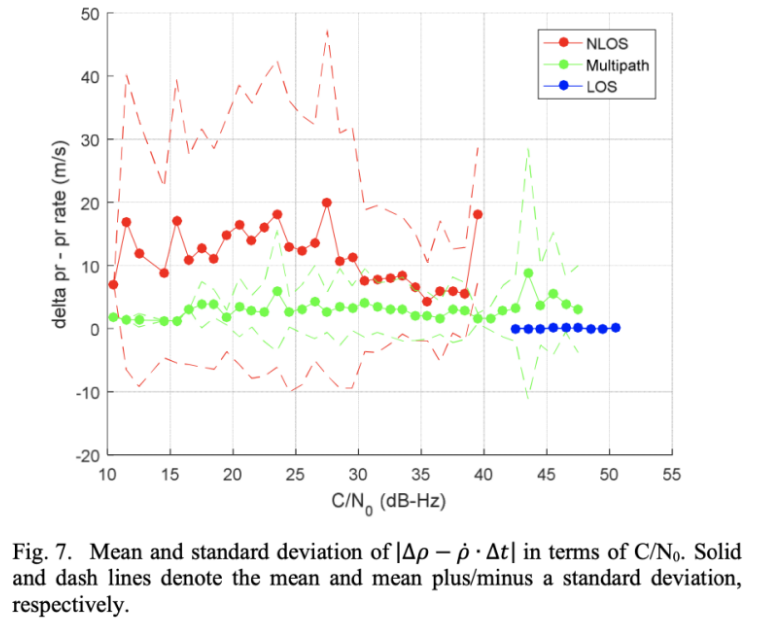
观察图6和7,显然,根据这两个特征,可以很容易地将视距、多径和非视距分为三组。例如,如果C/N0大于40 dB Hz,测量很可能是NLOS,
![]()
小于2米。基于这种逻辑,表II列出了使用多个特征训练的SVM分类器。使用了三个特征,1)RSS,2)伪距残差,3)δ伪距和伪距率之间的差异。同时使用第一个和最后一个特征,分类精度将达到75%左右。如果使用第四节中提到的所有特征来训练SVM分类器,那么仍然可以达到75%的准确率。换言之,使用另外两个功能并没有改进它。
总结
本文应用机器学习方法,利用从原始测量中提取的几个特征来区分接收到的GPS信号类型,即视距、多径和非视距。讨论了四个特征,包括1)接收信号强度,2)RSS变化率,3)伪距残差,4)增量伪距和伪距率之间的差异。根据实验结果,使用由第一个和最后一个特征训练的SVM分类器可以达到约75%的分类精度。
这项工作是一项初步研究,旨在证明机器学习方法在全球导航卫星系统定位中的有效性。需要注意的是,开发的分类器只能应用于静态应用程序。本研究的未来工作是使用动态数据集训练分类器。此外,将应用不同的机器学习方法,如决策树,来寻找最可靠的分类器。
关注下方【学姐带你玩AI】🚀🚀🚀
回复“机器学习”领取机器学习资料合集
码字不易,欢迎大家点赞评论收藏!