引言
上几期,睿铂为大家推送了两篇相对精度验证的文章,其优秀的成果引来了业界人士不少的赞叹。同时,许多客户朋友又提出了更高的要求。目前,在地籍精度的项目中,使用多旋翼无人机挂载倾斜摄影相机作业,是能够满足1:500地籍测量精度要求的。但如果在地籍精度的项目中,使用固定翼+倾斜相机的组合,还能保证最后成果的精度满足要求吗?
使用固定翼无人机做地籍测量,要保证成果的精度,载荷相机要面对两个难点:一是高速飞行导致载荷相机像移较大,会引入一定误差;另一个是相机必须具备高速采样能力,才适应如此快的速度。
为了进一步提高无人机航测地籍项目的作业效率,为客户提供更多的选择,本期,我们将对上面的问题展开项目验证。本次我们选择cw15为载机,倾斜摄影相机选用DG4pros,进行固定翼无人机地籍项目作业验证。

1测区介绍
测区选定:本次我们以重庆市某学校作为测试区域,测区实际有效范围0.73km²,外扩航飞范围1.25km²。
测区环境综合,涵盖密集房屋、高大建筑、山体、森林、草地、平地等,具有较好的典型性。测区地形高差在40米以内,最高楼约50米。
2相控布设
根据地籍精度规范要求,像控点布设间隔约150米,我们根据测区实际情况布设了34个像控点。其分布如下:

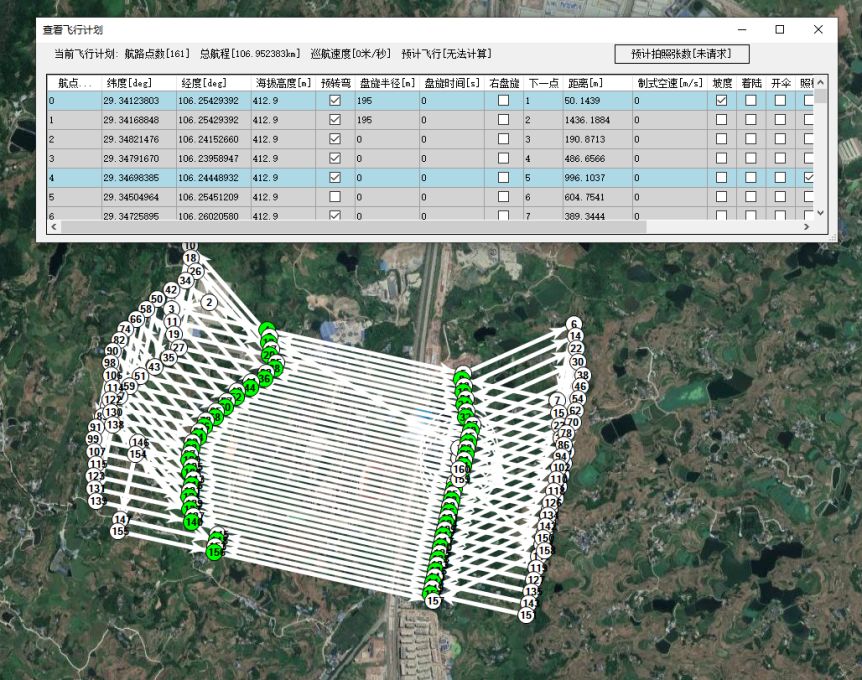
3航线设计
本次飞行使用cw15垂直起降固定翼无人机,按照地面1.5cm分辨率规划航线,航向重叠度75%,旁向重叠度75%。
无人机飞行速度19m/s,最快地速23m/s,飞行总航程119km,飞行时间90分钟,采集航片12175张,一个架次完成作业。
4飞行前准备
本次飞行起降场地为学校操场,视野开阔,无高建筑遮挡,是非常好的起飞场地。DG4pros高度集成化,对载机的兼容性很好,适应市面上绝大多数主流旋翼、固定翼类无人机。相机非常轻松地安装在CW15的任务舱内,从无人机设备开箱组装到整个设备调试完成,10分钟内就可以上天作业。

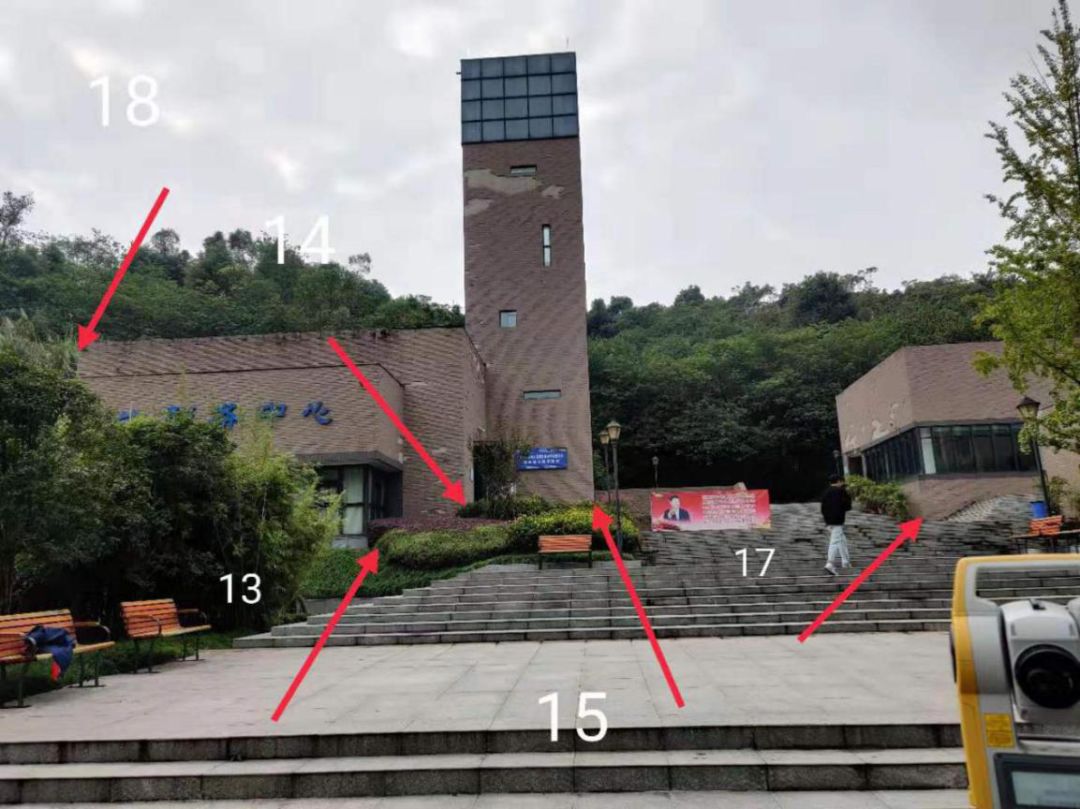
5房屋点实测
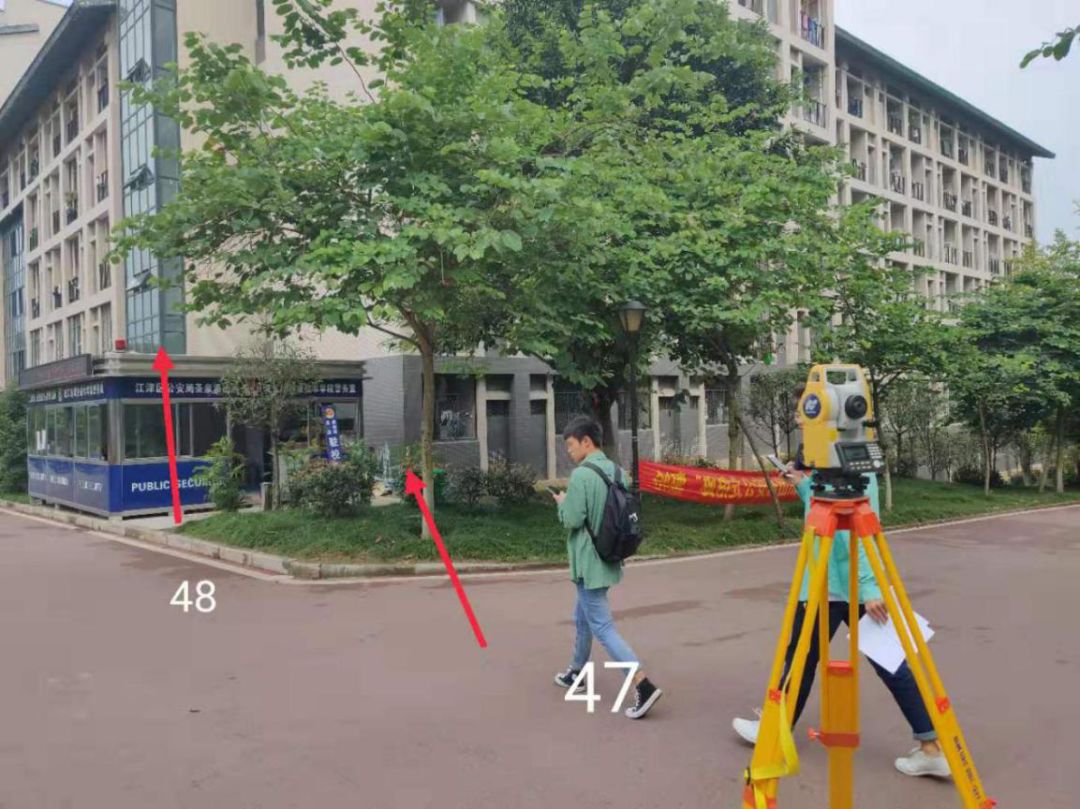
完成无人机航飞数据采集后,我们随机选择几栋教学楼,使用全站仪对教学楼的的房角点进行精确位置信息采集,用以检查模型的最终精度。

6数据预处理
本次航飞共获取航片12175张,颜色均匀,质量良好,无漏拍现象。使用Sky-Filter软件剔除边缘冗余航片后,剩余8255张有效航片,剔除率达到32.2%!
剔除完成后,使用睿铂最新研发的Sky-AAC软件处理有效航片原始数据,空三时间进一步压缩至4小时左右,一次通过!
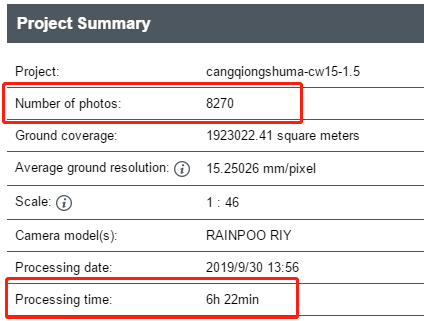
使用Sky-AAC软件处理前
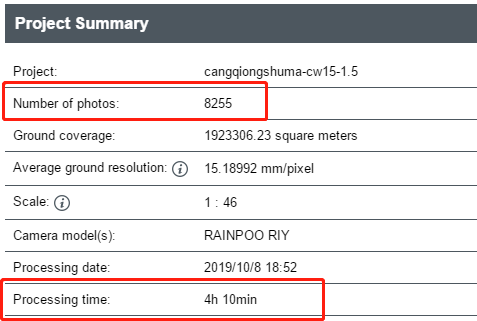
使用Sky-AAC软件处理后
7空三报告
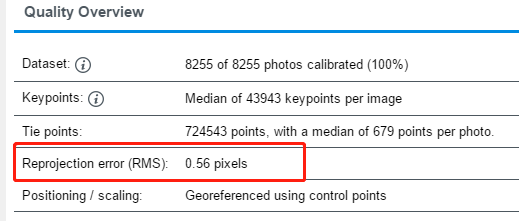
得益于相机出色的光学设计,重投影均方根误差RMS只有0.56pixels。因为固定翼飞行速度较快,像移比较大,所以相同的场景固定翼的RMS值会略微大于多旋翼的。
相机同步性
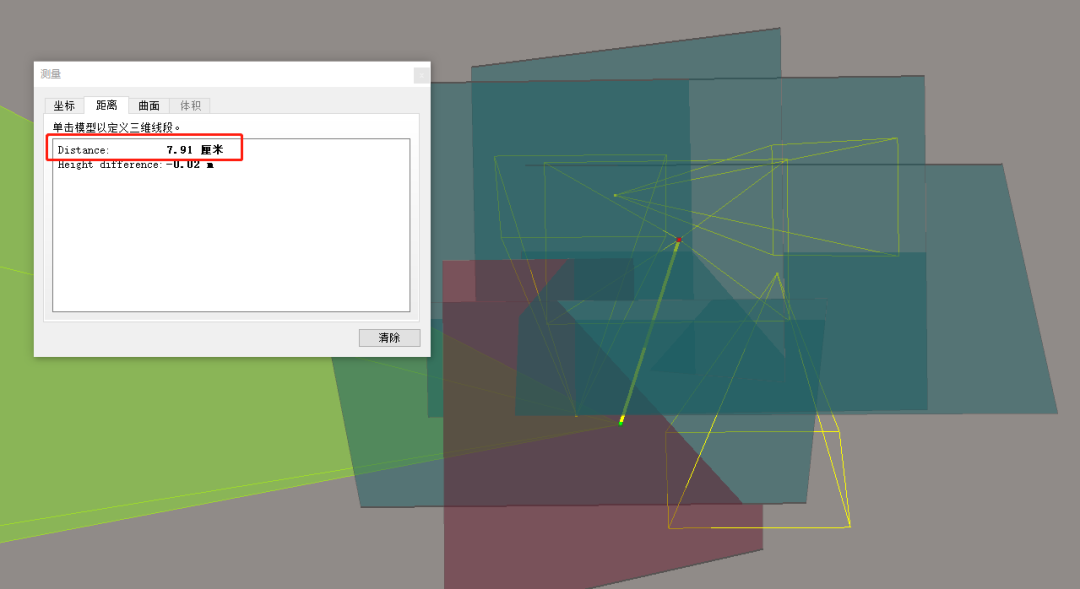
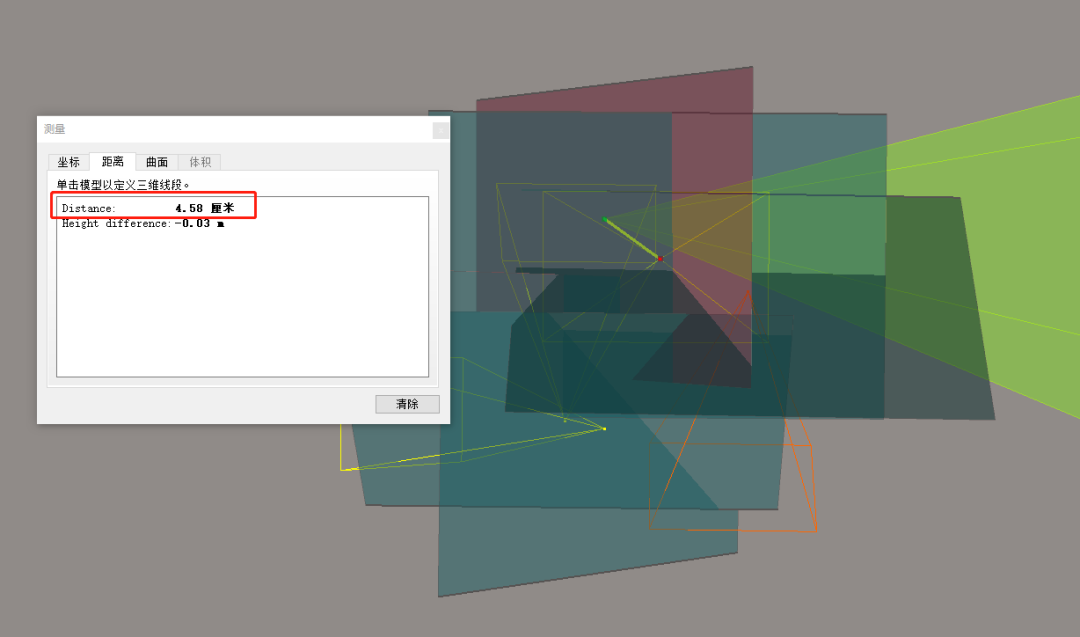

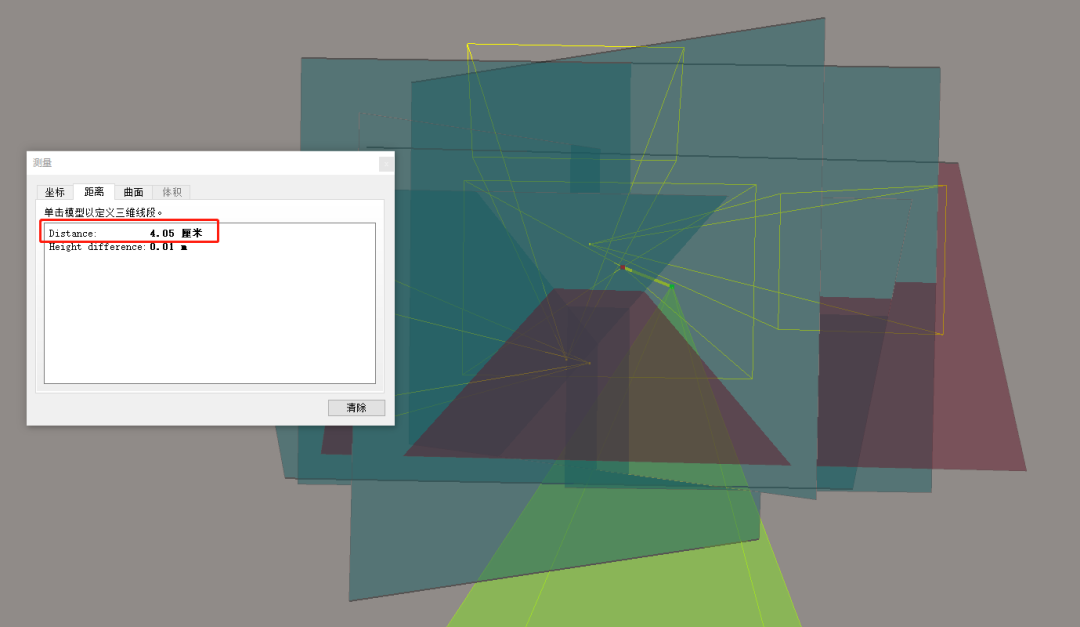
中心正射相机距离倾斜相机主点距离分别为:7.91cm、4.58cm、9.10cm、4.05cm,减去镜头实际位置差,误差值分别为:1.91cm、-1.42cm、3.10cm、-1.95cm,位置最大差值为3.10cm,相机曝光同步性能够控制在1.5ms以内。
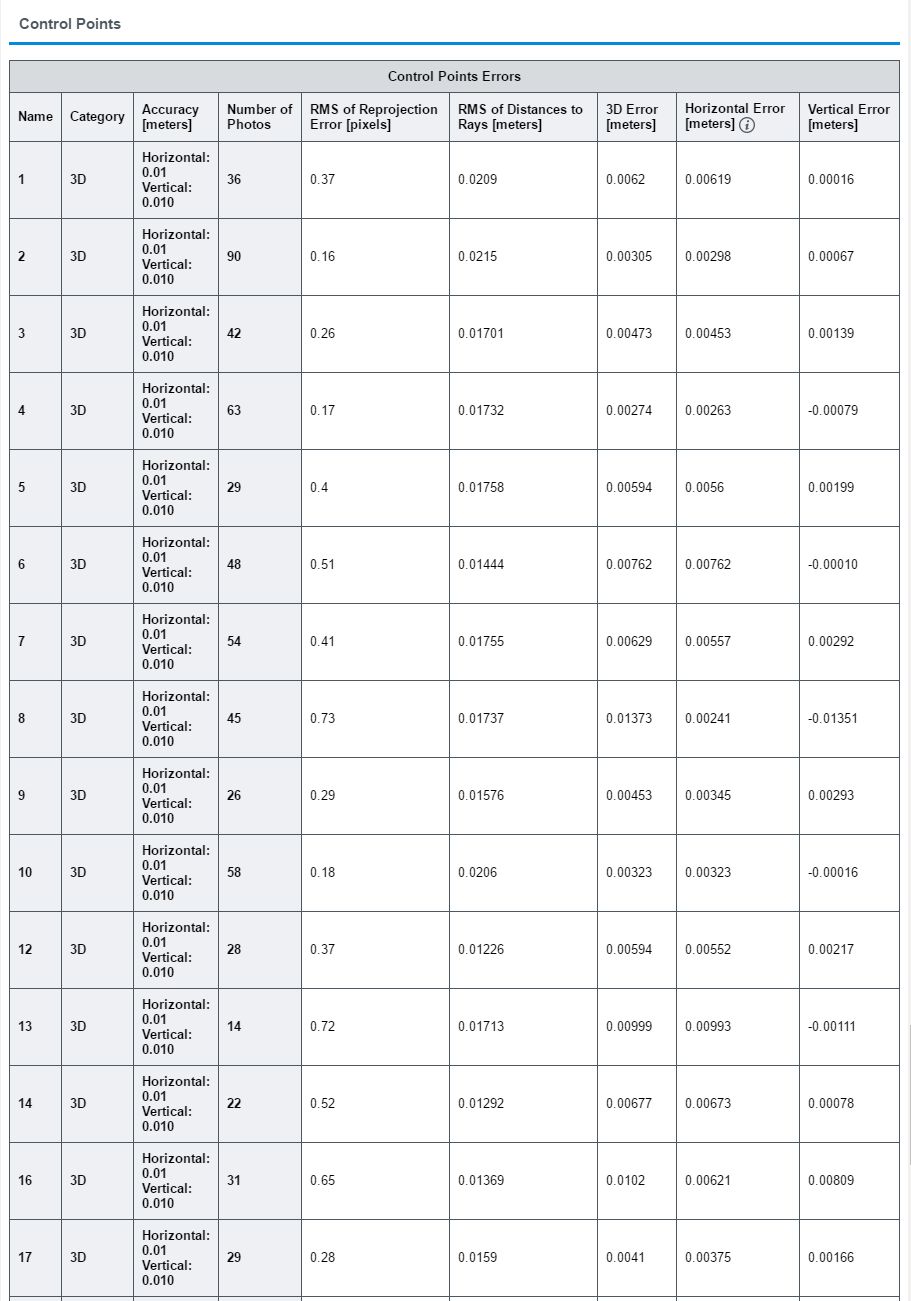
控制点误差
8精度验证
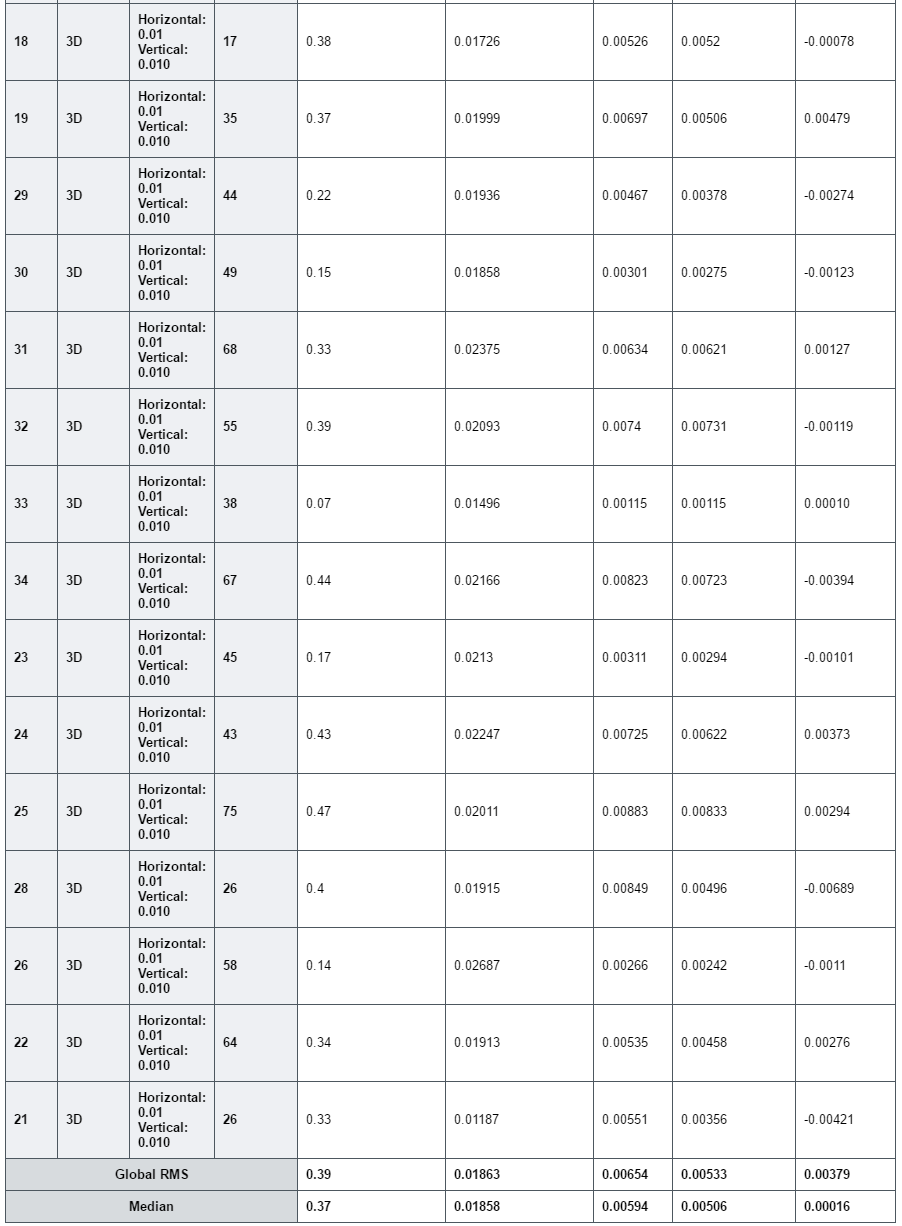
验证区域模型生产完成,将模型与检查点导入EPS软件,在模型上做辅助线(三次)测量房角点的平均坐标值,与实际用全站仪测量的检查点进行对比。精度对比结果如下表所示:
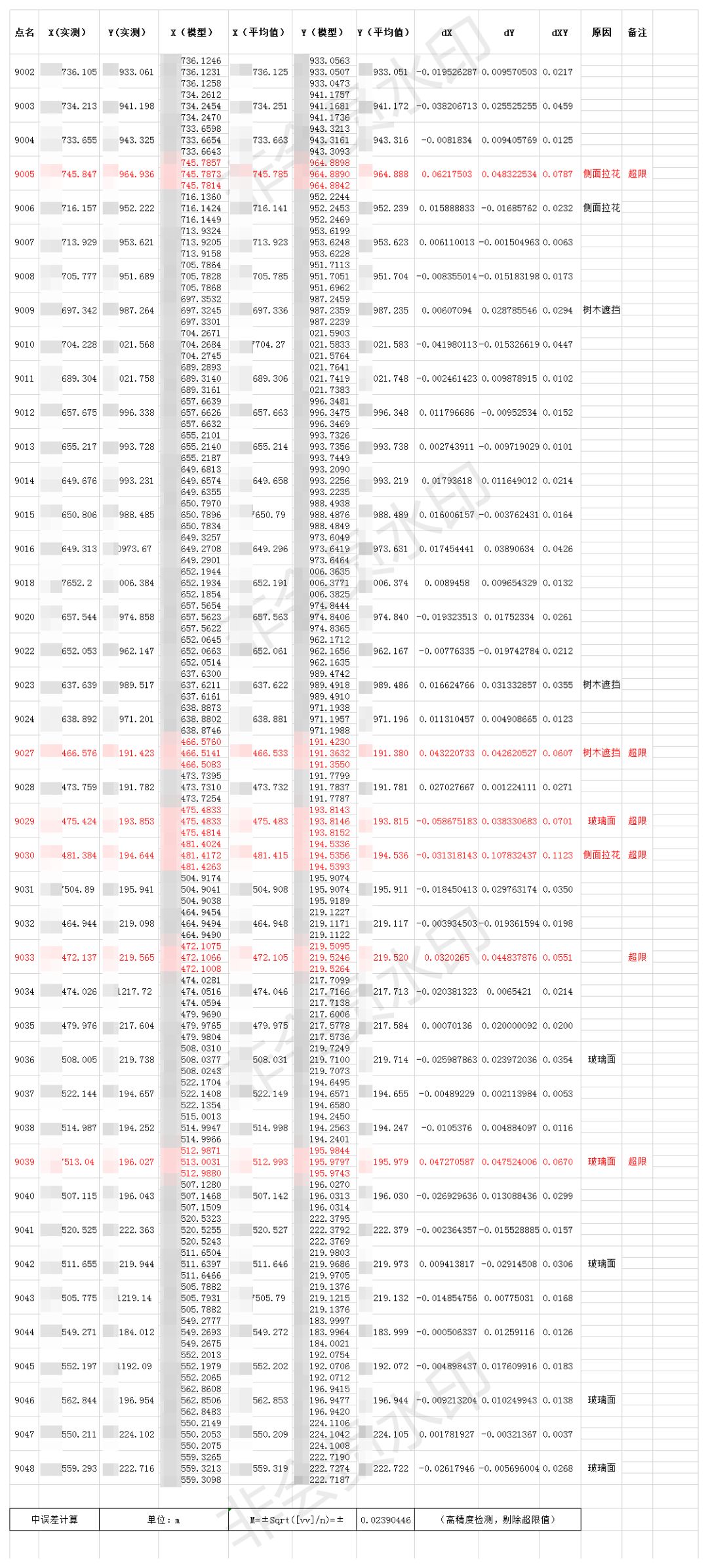
剔除由树木遮挡和玻璃面引起粗差点位后,最终中误差为0.0239米,完全满足国家1:500地籍测量标准。
9模型展示






10总结
要使用固定翼无人机做地籍精度项目,最大的挑战在于:
| 1 | 如何在这么快的飞行速度下,保证相机采集的航片重叠率足够,这对相机的曝光时间提出了很高要求。 |
| 2 | 高速下采集高分辨率场景,势必会产生较大的像移,也会引入一定误差。这就是目前市面倾斜相机只能搭载于多旋翼无人机平台才能达到地籍精度的原因。 |
| 3 | 高速飞行对镜头的同步性也有非常大挑战,即使有10ms的同步性误差,按无人机20m/s的飞行速度,也会导致20cm的定位误差。 |
睿铂通过研发出全新的存储方式,提高相机的工作频率。同时研发超低色散和超低畸变的光学镜头,进一步提升模型的精度。补偿了一些因为像移导致的误差,高同步性相机控制模块将相机同步性控制在1.5ms。本次实验的成功,在保证作业精度的前提之下,为客户提供了一种更高效的方案选择!
尾声
DG4pros是睿铂目前技术性能最完善,功能最强大的产品,融合了睿铂最顶尖的光学技术与软件功能。DG4pros拥有目前市面上最短的拍照间隔(0.6s),其硬件设备工艺性能非常高,出色的硬件系统保证了相机性能优于市面上绝大多数的同类相机,这是本次固定翼地籍项目成功的最大保障。同时,相机还搭载了多款软件系统,在空三解算前对获得的数据进行预处理,使得空三速度加快,分层概率大幅度降低。
之前,DG4pros还首次完成了针对百米高楼的地籍精度建模,在免相控条件下,以固定翼为载机,最终模型相对精度优于5cm等出色任务,在业内引起了强烈反响。DG4pros挑战了很多以往在业内人士认为“不可能”的项目,这些出色的成绩,都得益于其卓越的综合性能。
作为倾斜摄影技术应用的先行者,睿铂一直致力于研发出更优质的产品,帮助从业者解决他们面对的难题。我们不断前行,探索航测技术的深度应用,期待我们的产品成为推动地理信息行业发展的基石!