直流电机 PID 开发指南
(基于【平衡小车之家】直流电机 PID 学习套件 1.0)

目录
1.位置闭环控制
1.1 理论分析
1.2 控制原理图
1.3 C 语言实现
1.4 参数整定
2.速度闭环控制
2.1 理论分析
2.2 控制原理图
2.3 C 语言实现
PID 调节器出现于上世纪 30 年代。所谓 PID 控制,就是对偏差进行比例、 积分和微分的控制。PID 由 3 个单元组成,分别是比例(P)单元、积分(I)单 元、微分(D)单位。在工程实践中,一般 P 是必须的,所以衍生出许多组合的 PID 控制器,如 PD、PI、PID 等。
在我们的微处理器里面,因为控制器是通过软件实现其控制算法的,所以必须对模拟调节器进行离散化处理,这样它只需根据采样时刻的偏差值计算控制量。因此,我们需要使用离散的差分方程代替连续的微分方程。
假定采样时间很短时(比如 10ms),可做如下处理:
1) 用一介差分代替一介微分;
2) 用累加代替积分。
1.位置闭环控制
位置闭环控制就是根据编码器的脉冲累加测量电机的位置信息,并与目标值 进行比较,得到控制偏差,然后通过对偏差的比例、积分、微分进行控制,使偏 差趋向于零的过程。
1.1 理论分析
根据位置式离散 PID 公式
Pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k):本次偏差
e(k-1):上一次的偏差
∑e(k):e(k)以及之前的偏差的累积和;其中 k 为 1,2,,k;
Pwm 代表输出
1.2 控制原理图
图 1 为位置控制原理图。其中需要说明的是,我们这边是通过微机实现 PID 控制的,所以下面的【位置 PID 控制器】是一个软件实现的过程,比如在我们的 代码里面就是一个我们定义的函数。
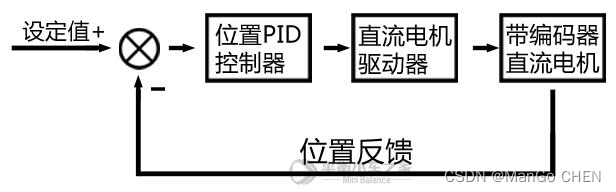
图 1
1.3 C 语言实现
如何把我们以上的理论分析和控制原理图使用 C 语言写出来呢,这是一个有 趣且实用的过程。位置式 PID 具体通过 C 语言实现的代码如下:
int Position_PID (int Encoder,int Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Encoder-Target; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias);
Last_Bias=Bias; //保存上一次偏差
return Pwm; //输出
}入口参数为编码器的位置测量值和位置控制的目标值,返回值为电机控制 PWM(现在再看一下上面的控制原理图是不是更加容易明白了)。
第一行是相关内部变量的定义。
第二行是求出速度偏差,由测量值减去目标值。
第三行通过累加求出偏差的积分。
第四行使用位置式 PID 控制器求出电机 PWM。
第五行保存上一次偏差,便于下次调用。
最后一行是返回。
然后,在定时中断服务函数里面调用该函数实现我们的控制目标: Moto=Position_PID(Encoder,Target_Position);
Set_Pwm(Moto); //===赋值给 PWM 寄存器
1.4 参数整定
首先我们需要明确我们的控制目标,也就是满足控制系统的 3 个要求:
1 稳定性
2 快速性
3 准确性
具体的评估指标有最大超调量、上升时间、静差等。 最大超调量是响应曲线的最大峰值与稳态值的差,是评估系统稳定性的一个 重要指标;上升时间是指响应曲线从原始工作状态出发,第一次到达输出稳态值 所需的时间,是评估系统快速性的一个重要指标;静差是被控量的稳定值与给定 值之差,一般用于衡量系统的准确性,具体可以参考图 2 的解析。

图 2
下面我们使用【平衡小车之家】直流电机 PID 学习套件 1.0 进行 PID 参数整 定实验,使用套件的控制板上面的按键调节 PID 参数,然后通过观察上位机响应 曲线,并评估控制效果,给出 PID 调节的心得。关于 P、I、D 三个参数的主要作 用,可以大致又不完全地概况为:P 用于提高响应速度、I 用于减小静差、D 用 于抑制震荡。
下面我们把控制目标从 10000 上升至 10260 时,观察响应曲线的变化。一般 我们进行 PID 参数整定的时候,首先设 I 和 D 值为零,然后把 P 值从 0 逐渐增大,
直到系统震荡。 ① KP=500,KI=0,KD=0.响应曲线如图 3:
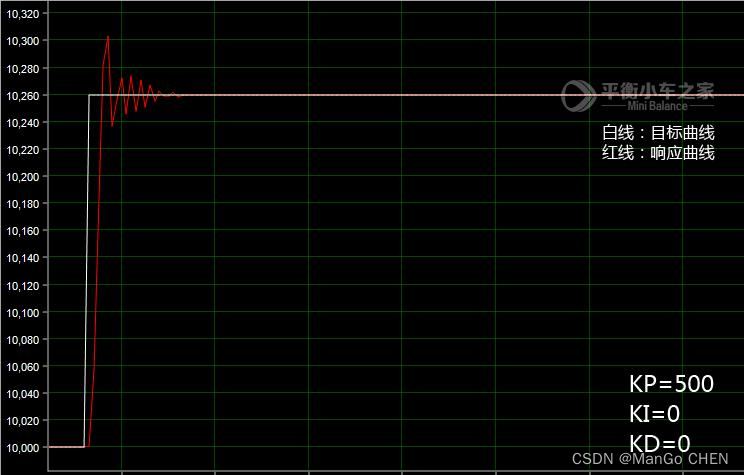
图 3
这个时候因为 P 值比较大,出现了震荡。可能大家会疑惑,为什么 I 值为零, 但是没有静差呢?因为这个时候的 P 值已经很大了,静差一般是在 P 值较小而 I 值为零的时候出现的。为了验证我们的想法,我们对 PID 参数进行调整。
② KP=50,KI=0,KD=0.响应曲线如图 4:
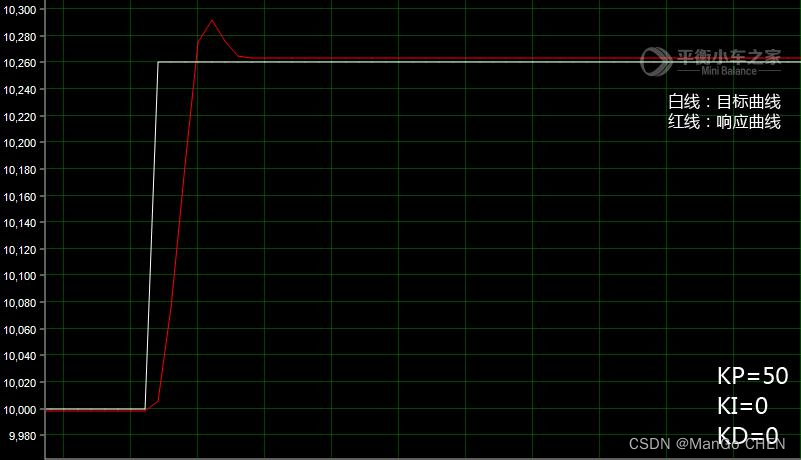
图 4
据图分析,如我们所设想的,在 P 值较小的时候出现了静差,响应速度也明显降 低。所以增大 P 值可以一定程度上消除静差,提高响应速度,但是会导致系统震 荡,而加入微分控制可以有效抑制震荡。下面我们尝试一组新的 PID 参数。
③ KP=500,KI=0,KD=400.响应曲线如图 5:

图 5
据图分析,加入微分控制之后,图 5 与图 3 相比,系统的震荡得到了抑制,震荡 次数减少。事物都有两面性,微分控制也是弊端的。可以看到,系统的响应明显 变慢了,因为引入微分控制相当于增大了系统的阻尼。这个时候我们需要结合 P 值和 I 值进行进一步的优化。
在实践生产工程中,不同的控制系统对控制器效果的要求不一样。比如平衡 车、倒立摆对系统的快速性要求很高,响应太慢会导致系统失控。智能家居里面 的门窗自动开合系统,对快速性要求就不高,但是对稳定性和准确性的要求就很 高,所以需要严格控制系统的超调量和静差。所以 PID 参数在不同的控制系统中 是不一样的。只要我们理解了每个 PID 参数的作用,我们就可以应对工程中的各 种项目的 PID 参数整定了。
位置控制的调节经验可以总结为:先只使用 P 控制,增大 P 系数至系统震荡 之后加入微分控制以增大阻尼,消除震荡之后再根据系统对响应和静差等的具体 要求,调节 P 和 I 参数。
一般而言,一个控制系统的控制难度,一般取决于系统的转动惯量和对响应速度的要求等。转动惯量越小、对响应速度要求越低,PID 参数就越不敏感。
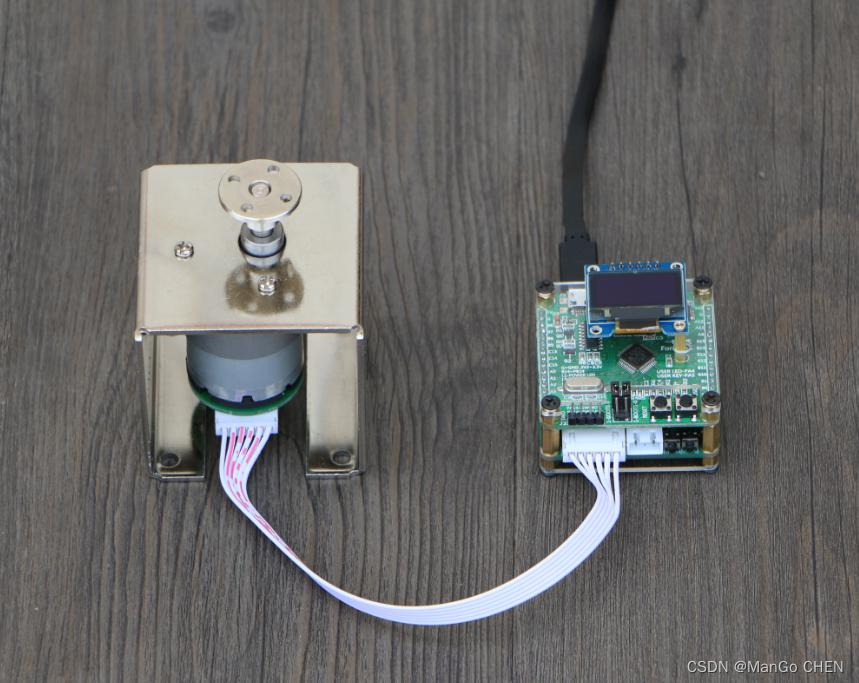
图 6
比如现在我们接到一个任务,使用如图 6 所示的【平衡小车之家】直流电机 PID 学习套件控制电机转 90°,需要严格控制超调量、和静差。但是对响应速度 无要求。
因为电机处于轻载的情况下,转动惯量很小,这是一个很容易完成的工作。 根据上面的理论分析和实践,因为响应速度无要求,一般 P 应该给小一点,然后 加大系统的阻尼防止超调,也就是 D 参数尽量大,另外因为 P 值较小,应该加入 I 控制减小静差。根据我们的经验和简单的参数整定,最终得到一组 PID 参数 KP=120,KI=0.1,KD=500;响应曲线如图 7 所示。

图 7
2.速度闭环控制
速度闭环控制就是根据单位时间获取的脉冲数(这里使用了 M 法测速)测量 电机的速度信息,并与目标值进行比较,得到控制偏差,然后通过对偏差的比例、 积分、微分进行控制,使偏差趋向于零的过程。
一些 PID 的要点在位置控制中已经有讲解,这里不再赘叙。
需要说明的是,这里速度控制 20ms 一次,一般建议 10ms 或者 5ms,因为在 这里电机是使用 USB 供电,速度比较慢,20ms 可以延长获取速度的单位时间, 提高编码器的采值。
2.1 理论分析
根据增量式离散 PID 公式
Pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k):本次偏差
e(k-1):上一次的偏差
e(k-2):上上次的偏差
Pwm 代表增量输出
在我们的速度控制闭环系统里面只使用 PI 控制,因此对 PID 控制器可简化 为以下公式:
Pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)
2.2 控制原理图
图 8 为速度控制原理图。其中需要说明的是,我们这边是通过微机实现 PID 控制的,所以下面的【速度 PI 控制器】是一个软件实现的过程,比如在我们的 代码里面就是一个我们定义的函数。
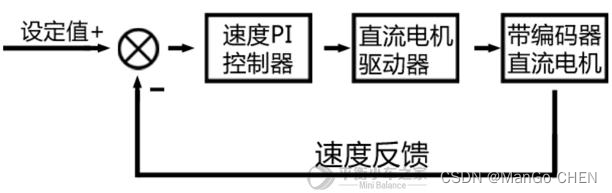
图 8
2.3 C 语言实现
增量式 PI 控制器具体通过 C 语言实现的代码如下:
int Incremental_PI (int Encoder,int Target)
{
static float Bias,Pwm,Last_bias;
Bias=Encoder-Target; //计算偏差
Pwm+=Velocity_KP*(Bias-Last_bias)+Velocity_KI*Bias; //增量式 PI 控制器
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}入口参数为编码器的速度测量值和速度控制的目标值,返回值为电机控制 PWM。
第一行是相关内部变量的定义。
第二行是求出速度偏差,由测量值减去目标值。
第三行使用增量 PI 控制器求出电机 PWM。
第四行保存上一次偏差,便于下次调用。
最后一行是返回。
然后,在定时中断服务函数里面调用该函数实现我们的控制目标: Moto=Incremental_PI(Encoder,Target_Velocity);
Set_Pwm(Moto); //===赋值给对应 MCU 的 PWM 寄存器
这里我们的参数 Velocity_KP=20,Velocity_KI=30,PI 参数在不同的系统中 不一样,我们的代码中的 PID 参数,仅针对【平衡小车之家】直流电机 PID 学习 套件 1.0 调试得到,大家可以使用控制板的按键调节 PI 参数,然后通过观察上 位机波形评估控制效果。
以上的知识请结合完整代码理解,我们的代码基于 STM32F103C8 控制器,但是把基于 C 语言的 PID 控制器部分剥离,并放在 control.c 里面,故对 STM32 不熟悉的同学依然可以使用记事本打开这个文件查看。
转自:平衡小车之家学习资料,如有侵权请联系删除。