<Linux开发>驱动开发 -之-基于pinctrl/gpio子系统的beep驱动
交叉编译环境搭建:
<Linux开发> linux开发工具-之-交叉编译环境搭建
uboot移植可参考以下:
<Linux开发> -之-系统移植 uboot移植过程详细记录(第一部分)
<Linux开发> -之-系统移植 uboot移植过程详细记录(第二部分)
<Linux开发> -之-系统移植 uboot移植过程详细记录(第三部分)(uboot移植完结)
Linux内核及设备树移植可参考以下:
<Linux开发>系统移植 -之- linux内核移植过程详细记录(第一部分)
<Linux开发>系统移植 -之- linux内核移植过程详细记录(第二部分完结)
Linux文件系统构建移植参考以下:
<Linux开发>系统移植 -之- linux构建BusyBox根文件系统及移植过程详细记录
<Linux开发>系统移植 -之-使用buildroot构建BusyBox根文件系统
Linux驱动开发参考以下:
<Linux开发>驱动开发 -之-pinctrl子系统
<Linux开发>驱动开发 -之-gpio子系统
<Linux开发>驱动开发 -之-基于pinctrl/gpio子系统的LED驱动
以下实验基于上述uboot和kernel系统移植,以及buildroot构建的BusyBox根文件系统。
一、前言
本文主要讲解基于pinctrl子系统和gpio子系统的前提下,编写beep驱动,并编写测试app测试beep的控制。
二、新增beep设备节点
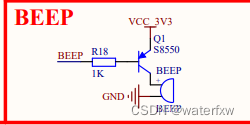
参考-<Linux开发>驱动开发 -之-基于pinctrl/gpio子系统的LED驱动的讲解,笔者使用的开发板上beep连接的是SNVS_TAMPER1这个io引脚,如下图:

可以在设备树中添加如下内容;
pinctrl节点添加如下:
路径:arch/arm/boot/dts/imx6ull-water-emmc.dts
pinctrl_beep: beepgrp {
fsl,pins =01
MX6UL_PAD_SNVS_TAMPER1__GPIO5_IO01 0x10B0
>;
};
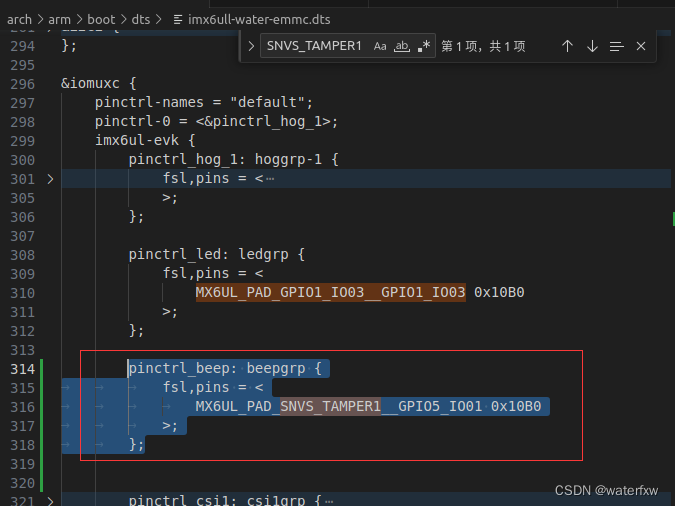
可以看到pinctrl_beep节点是在iomuxc节点下的。
beep设备节点添加如下:
路径:arch/arm/boot/dts/imx6ull-water-emmc.dts
beep{
#address-cells = <1>;
#size-cells = <1>;
compatible = "water-beep";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_beep>;
beep-gpio= <&gpio5 1 GPIO_ACTIVE_HIGH>;
status = "okay";
}
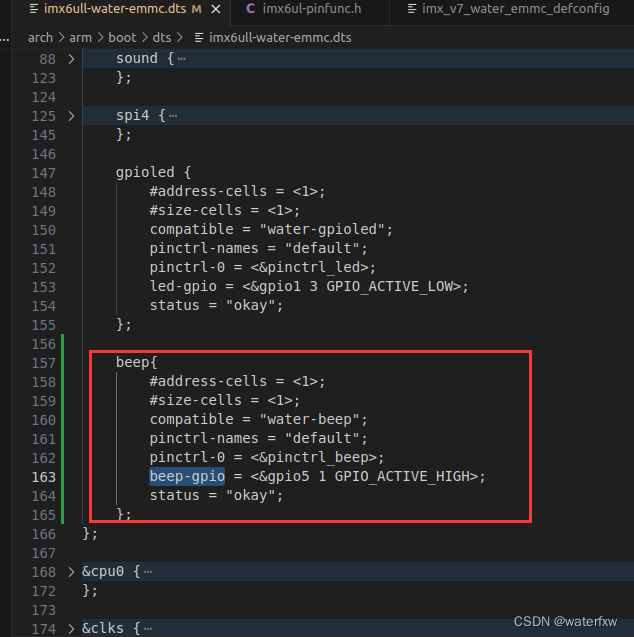
注意各属性命名,后续beep驱动中会使用对应的属性名。。。。。
新增beep 节点和gpioled节点一样都是在/节点下的。
添加完上述两个节点后,重新编译设备树“make dtbs”,然后用新生成的dtb文件启动kernel,在设备的/sys/firmware/devicetree/base/目录下有如下:

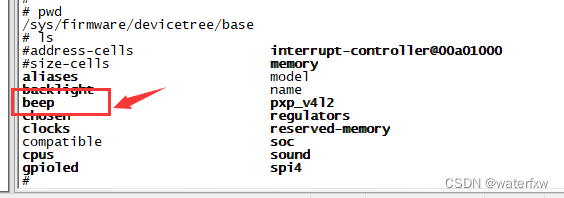
新增beep节点完成,后面编写驱动和app来测试验证这个beep设备。
三、编写驱动
3.1 编写led驱动 模块挂载
编译单独的ko文件,然后动态挂载设备。
使用vscode新建一个工程;
(1)新建目录beep
(2)使用vscode打开beep目录
(3)新建beep.c
(4) 在beep.c中输入驱动代码
/***************************************************************
Copyright © OneFu Co., Ltd. 2018-2023. All rights reserved.
文件名 : beep.c
作者 : water
版本 : V1.0
描述 : 采用 pinctrl 和 gpio 子系统驱动 beep蜂鸣器。
其他 : 无
日志 : 初版 V1.0 2023/05/28 water创建
***************************************************************/
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define BEEP_CNT 1 /* 设备号个数 */
#define BEEP_NAME "beep" /* 名字 */
#define BEEPOFF 0 /* 关beep */
#define BEEPON 1 /* 开beeo */
/* beep 设备结构体 */
struct beep_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
int beep_gpio; /* beep 所使用的 GPIO 编号 */
};
struct beep_dev beep; /* beep 设备 */
/*
* @description : 打开设备
* @param – inode : 传递给驱动的 inode
* @param – filp : 设备文件,file 结构体有个叫做 private_data 的成员变量
* 一般在 open 的时候将 private_data 指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int beep_open(struct inode *inode, struct file *filp)
{
filp->private_data = &beep; /* 设置私有数据 */
return 0;
}
/*
* @description : 从设备读取数据
* @param – filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param – offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t beep_read(struct file *filp, char __user *buf,
size_t cnt, loff_t *offt)
{
return 0;
}
/*
* @description : 向设备写数据
* @param - filp : 设备文件,表示打开的文件描述符
* @param - buf : 要写给设备写入的数据
* @param - cnt : 要写入的数据长度
* @param – offt : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t beep_write(struct file *filp, const char __user *buf,
size_t cnt, loff_t *offt)
{
int retvalue;
unsigned char databuf[1];
unsigned char beepstat;
struct beep_dev *dev = filp->private_data;
retvalue = copy_from_user(databuf, buf, cnt);
if(retvalue < 0) {
printk("kernel write failed!\r\n");
return -EFAULT;
}
beepstat = databuf[0]; /* 获取状态值 */
if(beepstat == BEEPON) {
gpio_set_value(dev->beep_gpio, 0); /* 打开 beep */
} else if(beepstat == BEEPOFF) {
gpio_set_value(dev->beep_gpio, 1); /* 关闭 beep */
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param – filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int beep_release(struct inode *inode, struct file *filp)
{
return 0;
}
/* 设备操作函数 */
static struct file_operations beep_fops = {
.owner = THIS_MODULE,
.open = beep_open,
.read = beep_read,
.write = beep_write,
.release = beep_release,
};
/*
* @description : 驱动入口函数
* @param : 无
* @return : 无
*/
static int __init water_beep_init(void)
{
int ret = 0;
/* 设置 beep 所使用的 GPIO */
/* 1、获取设备节点: beep */
beep.nd = of_find_node_by_path("/beep");
if(beep.nd == NULL) {
printk("beep node cant not found!\r\n");
return -EINVAL;
} else {
printk("beep node has been found!\r\n");
}
/* 2、 获取设备树中的 gpio 属性,得到 LED 所使用的 LED 编号 */
beep.beep_gpio = of_get_named_gpio(beep.nd, "beep-gpio", 0);
if(beep.beep_gpio < 0) {
printk("can't get beep-gpio");
return -EINVAL;
}
printk("beep num = %d\r\n", beep.beep_gpio);
/* 3、设置 GPIO5_IO01 为输出,并且输出高电平,默认关闭 beep */
ret = gpio_direction_output(beep.beep_gpio, 1);
if(ret < 0) {
printk("can't set gpio!\r\n");
}
/* 注册字符设备驱动 */
/* 1、创建设备号 */
if (beep.major) { /* 定义了设备号 */
beep.devid = MKDEV(beep.major, 0);
register_chrdev_region(beep.devid, BEEP_CNT,
BEEP_NAME);
} else { /* 没有定义设备号 */
alloc_chrdev_region(&beep.devid, 0, BEEP_CNT,
BEEP_NAME); /* 申请设备号 */
beep.major = MAJOR(beep.devid); /* 获取分配号的主设备号 */
beep.minor = MINOR(beep.devid); /* 获取分配号的次设备号 */
}
printk("beep major=%d,minor=%d\r\n",beep.major,
beep.minor);
/* 2、初始化 cdev */
beep.cdev.owner = THIS_MODULE;
cdev_init(&beep.cdev, &beep_fops);
/* 3、添加一个 cdev */
cdev_add(&beep.cdev, beep.devid, BEEP_CNT);
/* 4、创建类 */
beep.class = class_create(THIS_MODULE, BEEP_NAME);
if (IS_ERR(beep.class)) {
return PTR_ERR(beep.class);
}
/* 5、创建设备 */
beep.device = device_create(beep.class, NULL,
beep.devid, NULL, BEEP_NAME);
if (IS_ERR(beep.device)) {
return PTR_ERR(beep.device);
}
return 0;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit water_beep_exit(void)
{
/* 注销字符设备驱动 */
cdev_del(&beep.cdev); /* 删除 cdev */
unregister_chrdev_region(beep.devid, BEEP_CNT); /* 注销 */
device_destroy(beep.class, beep.devid);
class_destroy(beep.class);
}
module_init(water_beep_init);
module_exit(water_beep_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("water");
(5) 配置linux头文件
同时按下ctrl+shitf+P,显示如下:
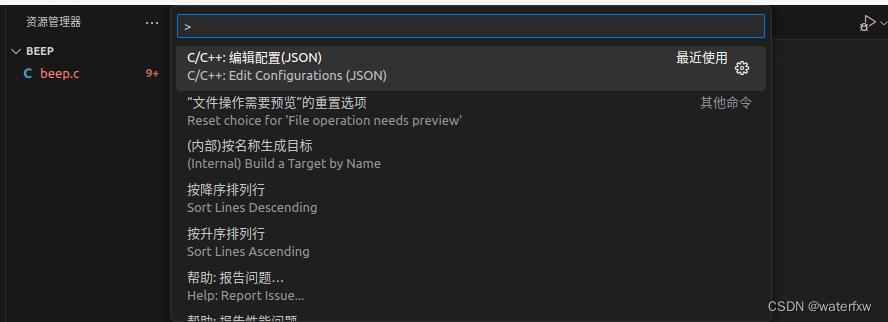
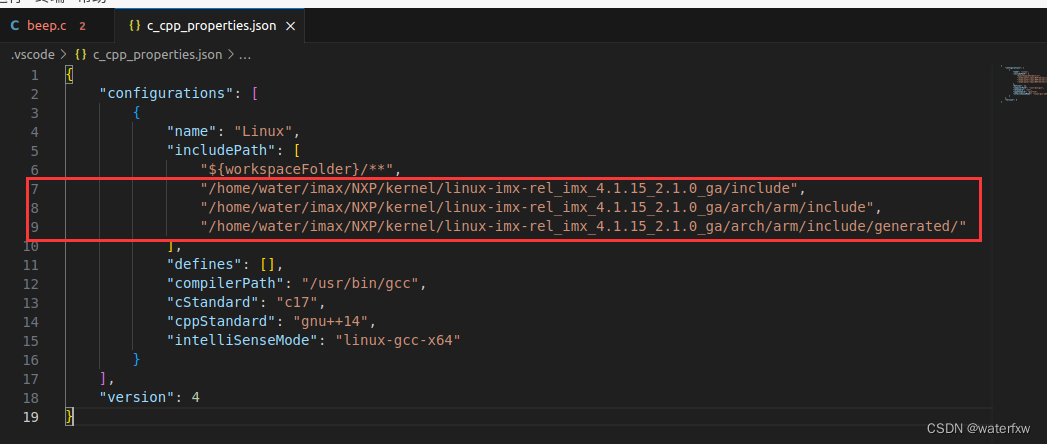
选择“c/c++:编辑配置(JSON)”,添加linux的头文件,注意是绝对路径,内容如下:
"/home/water/imax/NXP/kernel/linux-imx-rel_imx_4.1.15_2.1.0_ga/include",
"/home/water/imax/NXP/kernel/linux-imx-rel_imx_4.1.15_2.1.0_ga/arch/arm/include",
"/home/water/imax/NXP/kernel/linux-imx-rel_imx_4.1.15_2.1.0_ga/arch/arm/include/generated/"
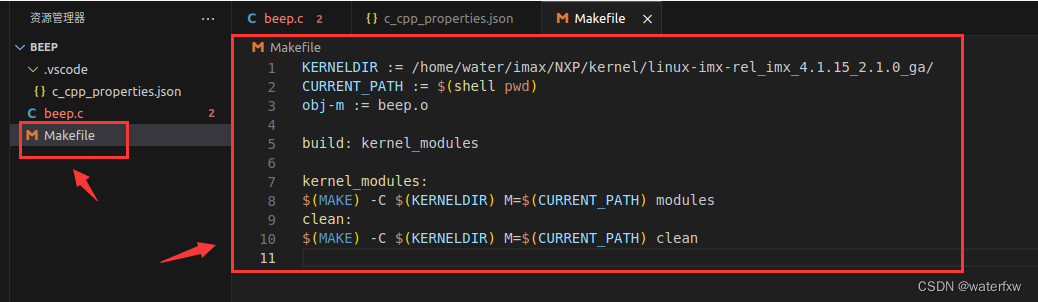
(6) 编写Makefile
ARCH=arm
CROSS_COMPILE=arm-linux-gnueabihf-
KERNELDIR := /home/water/imax/NXP/kernel/linux-imx-rel_imx_4.1.15_2.1.0_ga/
CURRENT_PATH := $(shell pwd)
obj-m := beep.o
KBUILD_CFLAGS += -fno-pie
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
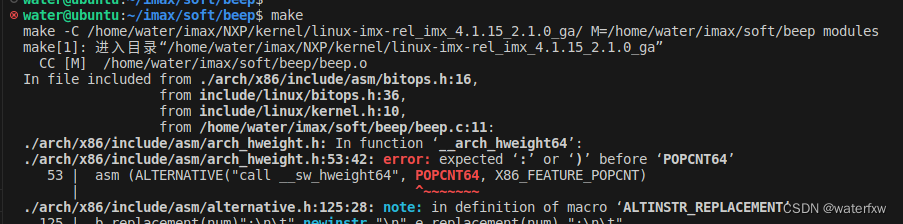
(7) 编译
make
编译成功如下:


出现一下错误,,新增:
ARCH=arm
CROSS_COMPILE=arm-linux-gnueabihf-
KBUILD_CFLAGS += -fno-pie
 出现以下错误,需将kernel内核顶级目录的Makefile下修改下面句子:
出现以下错误,需将kernel内核顶级目录的Makefile下修改下面句子:
路径:/home/water/imax/NXP/kernel/linux-imx-rel_imx_4.1.15_2.1.0_ga/Makefile.
读者更具自己的kernel路径修改…
原:
ARCH ?= $(SUBARCH)
CROSS_COMPILE ?= $(CONFIG_CROSS_COMPILE:"%"=%)
改:
ARCH ?= arm
CROSS_COMPILE ?= arm-linux-gnueabihf-
(8) 放到设备中挂载
在文件系统中新建文件夹,如下:
mkdir -p /home/water/imax/nfs/buildrootfs/lib/modules/4.1.15+
将前面编译的ko驱动文件放到4.1.15+目录
cp beep.ko /home/water/imax/nfs/buildrootfs/lib/modules/4.1.15+

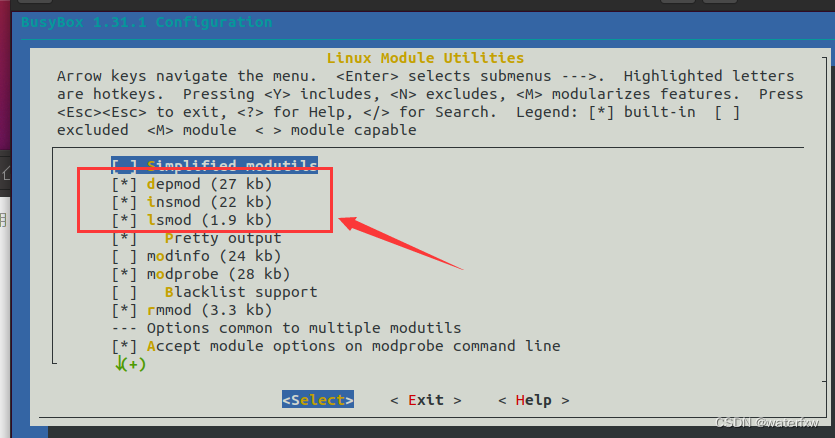
使用depmod命令提示下列错误:
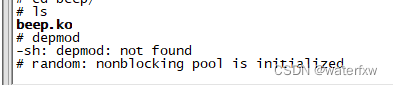
原因:作者使用buildroot构建busybox时没有是能depmod,
解决方法:重新buildroot构建busybox使能depmod.
buildroot构建参考:<Linux开发>系统移植 -之-使用buildroot构建BusyBox根文件系统
进入buildroot目录下,运行:
sudo make busybox-menuconfig 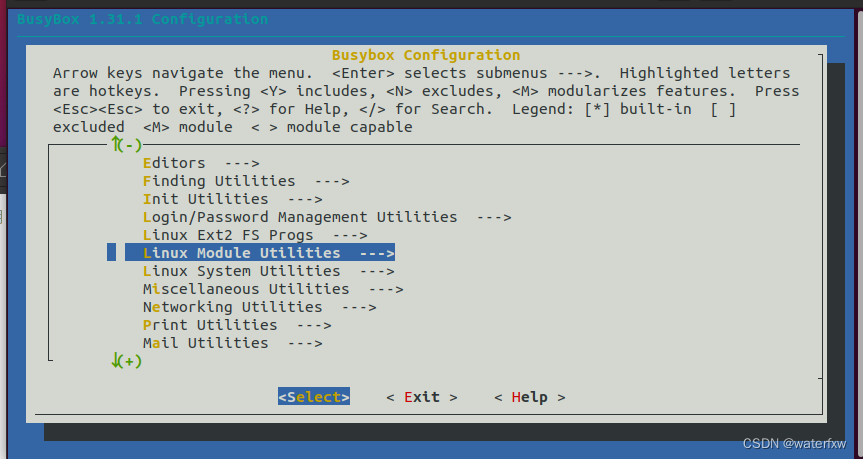
重新编译:
sudo make FORCE_UNSAFE_CONFIGURE=1
替换原根文件系统:(记得先保留/root/water_soft/,否则会被删掉 之前开发的内容)
sudo rm -r buildrootfs
mkdir buildrootfs
cd buildrootfs
cp ../../NXP/buildroot/buildroot-2020.05/output/images/rootfs.tar .
tar -vxf rootfs.tar
sudo rm rootfs.tar
重新运行depmod

又发生错误,我们新建这个/lib/modules/4.1.15+目录即可:
mkdir -p /libmodules/4.1.15+
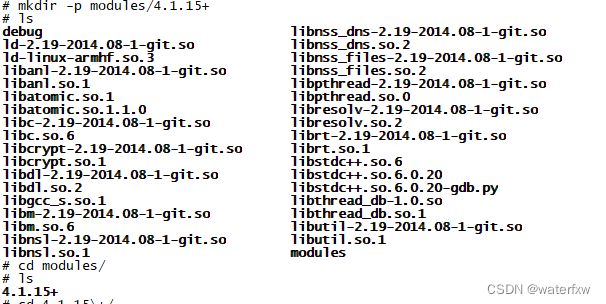
新曾的beep.ko文件需要放到/lib/modules/4.1.15+目录下,然后在/lib/modules/4.1.15+下在运行:
depmod
运行之后在同级目录下的 modules.dep文件会有文件记录,如下:
# cat modules.dep
beep.ko:
挂载驱动:
modprobe beep.ko
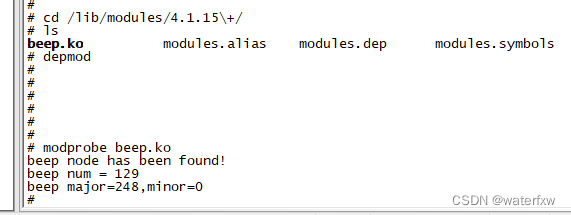
上述就是动态挂载的过程,正常挂载beep设备,并获取了对应的设备号等信息。
3.2 beep驱动并入内核一起编译
由于kernel没有专门针对beep的驱动,那么我们讲究将beep设备放到led的驱动目录下吧。
新建文件:drivers/leds/beep-water.c
在beep-water.c输入以下内容:
驱动内容与3.1节的驱动内容保持一致。
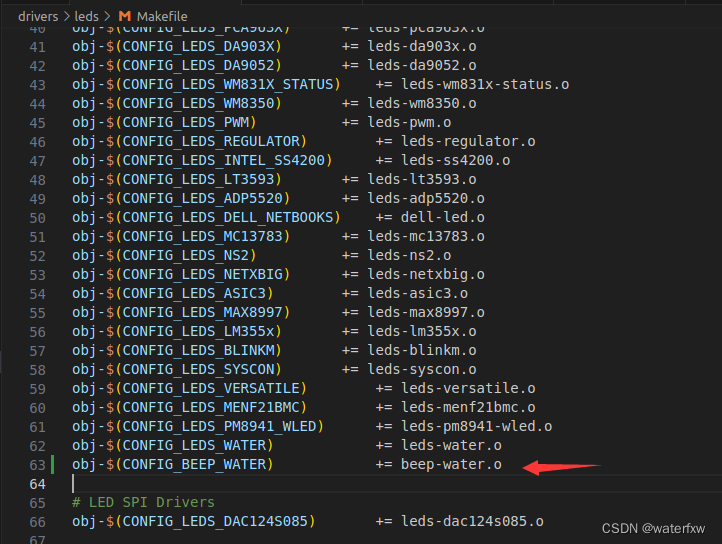
3.3 添加makefile编译项
在drivers/leds/leds-water.c同级目录下找到Makefile文件,添加一下内容:
路径:drivers/leds/Makefile
obj-$(CONFIG_BEEP_WATER) += beep-water.o
3.4 添加menuconfig选项
在3.3节中,我们把驱动添加进Kernel了,那怎么样才能编译这个驱动呢?我们添加的Makefile内容中有CONFIG_BEEP_WATER 这个宏,只要这个宏为true那么就会编译beep-water.o所对于的beep-water.c文件了。
在Kconfig文件末尾添加如下内容:
路径:drivers/leds/Kconfig
config BEEP_WATER
tristate "beep support for water imax6ull board"
help
This option enables support for the imax water beep.
添加完上述内容保存后,就可以通过“make menuconfig”来配置使用这个led驱动了。
3.5 使用menuconfig配置驱动
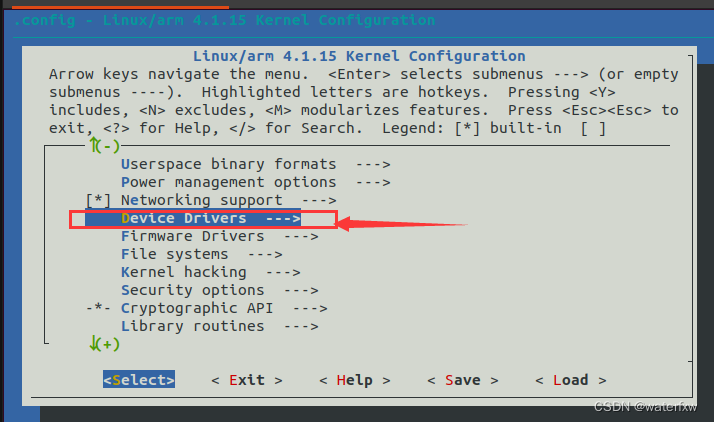
在kernel跟目录运行“make menuconfig”后,如下步骤配置;
(1) 选择 “Device Drivers —>”
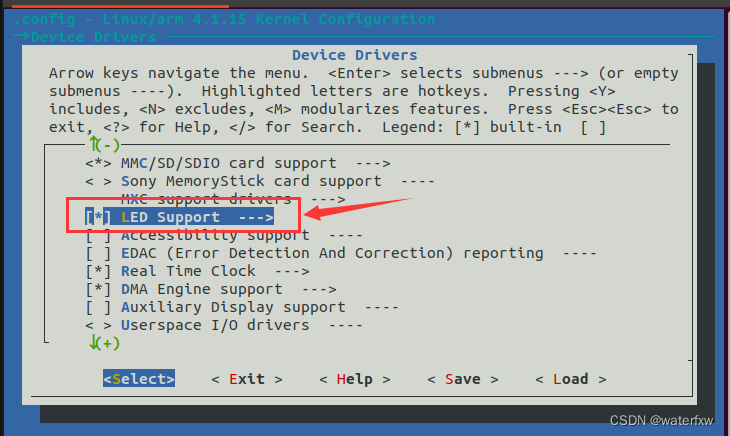
(2) 选择 “LED Support —>”
(3) 选择 “beep Support for water imax6ull board —>”
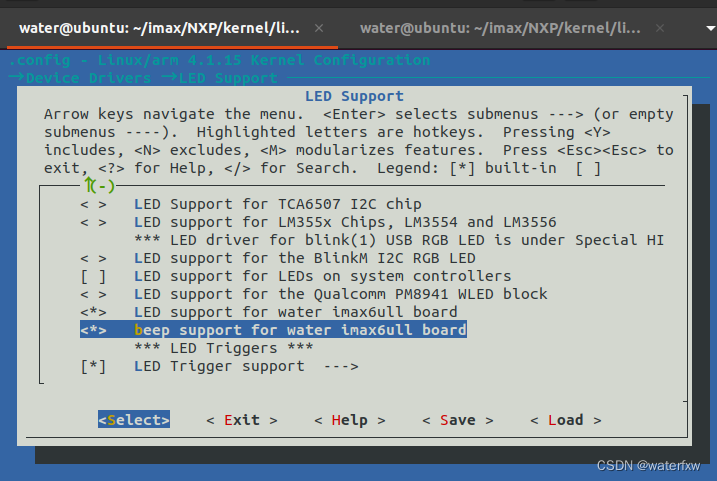
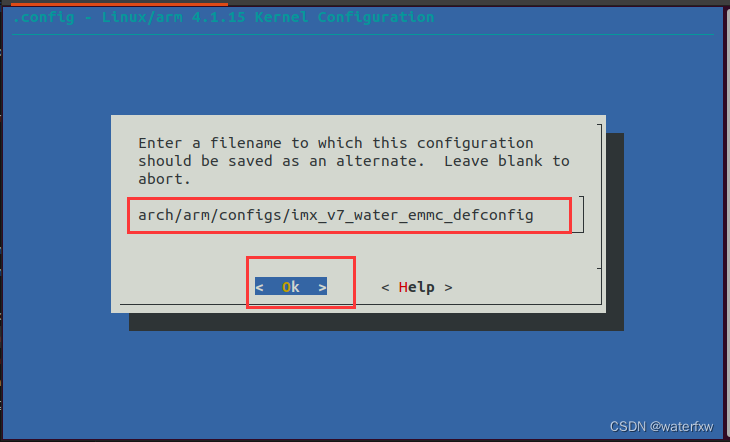
选中之后按“Y”,在行前的尖括号里会出现*,表示编译进内核;然后用键盘左右键选择"Save",保存配置;保存的路径使用默认的路径,如下,然后OK即可。
配置完驱动编译,重新编译kernel,然后使用新的kernel启动。
四、编写测试beep的app
在ubuntu下新建目录:/home/water/imax/soft/beep,并新建文件beep_water_app.c,然后输入一下内容:
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
/***************************************************************
* Copyright © onefu Co., Ltd. 2019-2023. All rights reserved.
* 文件名 : beep_water_app.c
* 作者 : water
* 版本 : V1.0
* 描述 : beep 驱测试APP。
* 其他 : 使用方法:./beep_water_app /dev/beep <1>|<2>
* argv[2] 0:关闭beep
* argv[2] 1:打开beep
* 日志 : 初版V1.0 2023/05/28 water创建
* ***************************************************************/
#define BEEPOFF 0
#define BEEPON 1
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功;其他 失败
*/
int main(int argc, char *argv[])
{
int fd, retvalue; //fd: 文件描述符 用以对文件操作 retvalue:存放函数操作后的返回值
char *filename; //filename:文件名,有主函数参数传入赋值
unsigned char databuf[1]; //定义的buf,用来读写数据用
if(argc != 3){ //判断主函数传入的函数的参数的个数
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1]; //获取第1个参数,存放的是文件的路径(即要操作的设备文件路径)
fd = open(filename,O_RDWR); /*打开驱动文件*/
if(fd < 0){
printf("Can't open file %s\r\n",filename); /*打开失败,输出提示*/
return -1;
}
databuf[0] = atoi(argv[2]); /* 要执行的操作:打开或关闭 */
retvalue = write(fd, databuf, sizeof(databuf)); /*向设备驱动写入数据*/
if(retvalue < 0){
printf("BEEP Control Failed!\r\n",filename); /*写入错误输出提示*/
}
retvalue = close(fd); /*关闭文件*/
if(retvalue < 0){
printf("Can't close file %s\r\n",filename); /*关闭错误输出提示*/
return -1;
}
return 0;
}
//编译指令: arm-linux-gnueabihf-gcc beep_water_app.c -o beep_water_app
编译app:
arm-linux-gnueabihf-gcc beep_water_app.c -o beep_water_app

五、运行测试
将编译生成的 beep_water_app 执行文件拷贝到文件系统的/root/water_soft/beep/目录下:

在Securecrt终端运行如下命令:
cd /root/water_soft/beep/
./beep_water_app /dev/beep 1

运行之后,即可观看开发板beep状态为开。
如果是./beep_water_app /dev/beep 0则beep为关。
作者实际现象是正常开关的,读者可以自行测试自己的开发板。
六、总结
我们结合pinctrl子系统和gpio子系统,完成了beep的驱动开发,开发beep蜂鸣器的驱动,其原理与led是一样的,都是通过控制gpio引脚输出高低电平来控制设备的。
先通过控制简单的led、beep等设备,熟悉掌握pinctrl子系统和gpio子系统,后面我们在深入开发比较复杂的驱动。
一步一脚印,法路自然成。






![[MAUI]模仿Chrome下拉标签页的交互实现](https://img-blog.csdnimg.cn/fc17be3ae466459b960abd1aa0e31680.gif)