SOC与MCU的区别及汽车电子未来发展以及展望
- CPU(Central Processing Unit),是一台计算机的运算核心和控制核心。CPU由运算器、控制器和寄存器及实现它们之间联系的数据、控制及状态的总线构成。差不多所有的CPU的运作原理可分为四个阶段:提取(Fetch)、解码(Decode)、执行(Execute)和写回(Writeback)。 CPU从存储器或高速缓冲存储器中取出指令,放入指令寄存器,并对指令译码,并执行指令。所谓的计算机的可编程性主要是指对CPU的编程。
- MPU (Micro Processor Unit),叫微处理器(不是微控制器),通常代表一个功能强大的CPU(暂且理解为增强版的CPU吧),但不是为任何已有的特定计算目的而设计的芯片。这种芯片往往是个人计算机和高端工作站的核心CPU。Intel X86,ARM的一些Cortex-A芯片如飞思卡尔i.MX6、全志A20、TI AM335X等都属于MPU。
- MCU(Micro Control Unit),叫微控制器,是指随着大规模集成电路的出现及其发展,将计算机的CPU、RAM、ROM、定时计数器和多种I/O接口集成在一片芯片上,形成芯片级的芯片,比如51,AVR、Cortex-M这些芯片,内部除了CPU外还有RAM、ROM,可以直接加简单的外围器件(电阻,电容)就可以运行代码了。而如x86、ARM这些MPU就不能直接放代码了,它只不过是增强版的CPU,所以得添加RAM,ROM。
- SOC(System on Chip),指的是片上系统,MCU只是芯片级的芯片,而SOC是系统级的芯片,它即像MCU(51,avr)那样有内置的RAM、ROM同时又像MPU那样强大,不单单是放简单的代码,还可以放系统级的代码,也就是说可以运行操作系统(可以认为是将MCU的集成化与MPU的强处理力的优点合二为一)。
- ECU(Electronic Control Unit),指的是电子控制器单元,又称为汽车的“行车电脑”,它们的用途就是控制汽车的行驶状态以及实现其各种功能。主要是利用各种传感器、总线的数据采集与交换,来判断车辆状态以及司机的意图并通过执行器来操控汽车。
2、汽车电子的未来发展
2.1、汽车电子的概念
汽车电子是车体汽车电子控制装置和车载汽车电子装置的总称。车体汽车电子控制装置,包括发动机控制系统、底盘控制系统和车身电子控制系统(车身电子ECU)。车载汽车电子装置是在汽车环境下能够独立使用的电子装置,它和汽车本身的性能并无直接关系。它们包括汽车信息系统(行车电脑)、导航系统、汽车音响及电视娱乐系统、车载通信系统、上网设备等。
2.2、汽车电子电气架构由分布式向域集中式再到整车集中式发展
近些年来伴随着应用计算机(微处理机)和集成电路的成果在汽车工业的广泛应用,汽车正逐渐从机械产品属性向电子产品属性演化!而当前正在轰轰烈烈进行的汽车“新四化”浪潮将催生汽车电子技术在信息通讯、电子电气架构、软件架构、处理器和传感器等五个方面发生变革。
2.2.1传统分布式架构
为了统筹考虑汽车的电子电气系统原理设计、中央电器盒的设计、连接器的设计、电子电气分配系统等设计,德尔福公司首先提出了整车电子电气架构(EEA)的概念。
传统的电子电气架构是一种分布式方案,根据汽车功能划分成不同的模块,如动力总成、信息娱乐、底盘和车身等。
2.2.1.1、传统分布式架构的优缺点
这种分布式方案最大的特点为:
- 功能划分明确,可以通过预先的设计来严格明确界限。
- 历史工作的继承性强,由于划分后的每个模块相对独立,可以根据需求独立更新。
然而,这种模式的缺点也很明显:
- 容易导致模块太多,造成资源的浪费。
- 可控性不强。

随着汽车“新四化”的发展,分布式电子电器架构设计已经不能满足需求。一方面现有的电子电气架构在功能扩展性这一块并不好,无法做到柔性兼容,每增加一个新功能都需要增加一套ECU和通讯系统,随着ECU系统数量和质量的增加。

由于是分布式计算,大量的运算资源被浪费了,由此产生的成本增加大约300-500美元,如果沿用目前的电子架构体系,产生的成本增加最少也是1000美元。另一方面是线束系统。一辆低端车的线束系统成本只要大约300美元,重量大约30公斤,长度大约1500米,线束大约600根,1200个接点。而目前一辆豪华车的线束系统成本大约550-650美元,重量大约60公斤,线束大约1500根,长度大约5000米,3000个接点。如果沿用目前的电子架构体系,无人车时代的线束成本不会低于1000美元,重量可达100公斤。传统车的线束占了总成本的5%左右。
2.2.2、域控制器集中式架构
2.2.2.1、ECU的消亡,“域”概念的出现
为了降低整车成本,汽车电子电气架构将由分布式向着集中式发展,其核心思想是用高性能的中央计算单元取代现在常用的分布式计算架构。
传统ECU模块开始软硬件分离,硬件被逐步取消,软件被集中到一起,通过单个计算平台来实现对多个功能的控制。而域控制器,就是将离散的ECU软件功能集之大成的黑匣子,基于“域”的电子电气架构也开始出现。
2.2.2.2、“域”控制器集中式架构的发展
奥迪将新架构命名为中央计算集群(central computing cluster),而宝马叫做中央计算平台(central computing platform),Tesla在Model3上首次使用了左车身控制器,右车身控制器,自动驾驶及娱乐域控制模块这三个控制器来控制整车电气系统,实现了域控制器概念。在通讯技术更加先进的未来,车辆的控制系统将放在云端,实现数据云传输和云控制,车辆硬件将简化成一个传感器和执行器,这样可以在降低成本的同时无限增加车辆功能的可拓展性。总之,汽车电子电气架构正围绕一个强有力的通信架构和整车级计算平台这两项内容而展开深度演化。
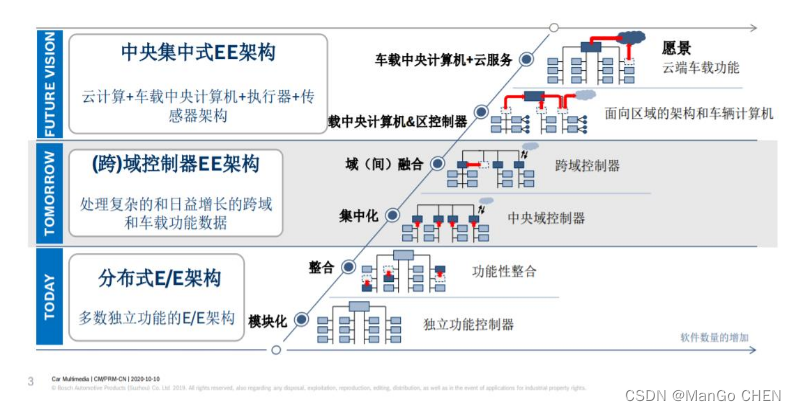
上图为BOSCH(博世)对电子电气架构的阶段定义
在博世看来,整车电子电气架构的进程可以大致分为三个阶段:
- 分布式架构
- 跨域集中式架构
- 中央式架构
目前大多数主机厂仍处于分布式向跨域集中式架构发展的路上,像特斯拉、大众等前沿玩家已经在跨域集中式架构领域深耕。
但在跨域集中式电子电气架构里,玩家可以分为两大类,一类以特斯拉为主,另一类则是以大众为主。
作为跨域集中式架构的开创者,特斯拉的电子电气架构一直在高速演进。
2012年Model S车型下线时,最初的架构是将整车分为动力域、底盘域、车身域等明显的“域”,按照功能属性对ECU软件进行“域”的集成。
2017年Model 3下线时,功能域的划分已经不太明显,而是出现了跨域的痕迹。
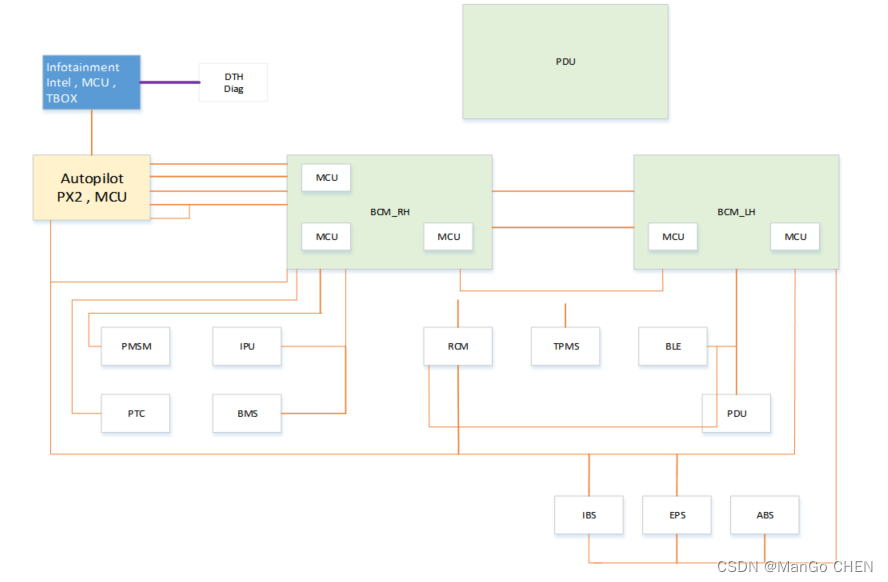
其新架构分为了三大部分:
- 中央计算模块(CCM)
- 左车身控制模块(BCM LH)
- 右车身控制模块(BCM RH)
其中,中央计算模块将 ADAS 域、信息娱乐系统域和通信系统域集成到一起。
也就是说,三大模块会将位置域旁的ECU“吃掉”,基于这种架构,汽车的ECU模块会更少,集成度更高
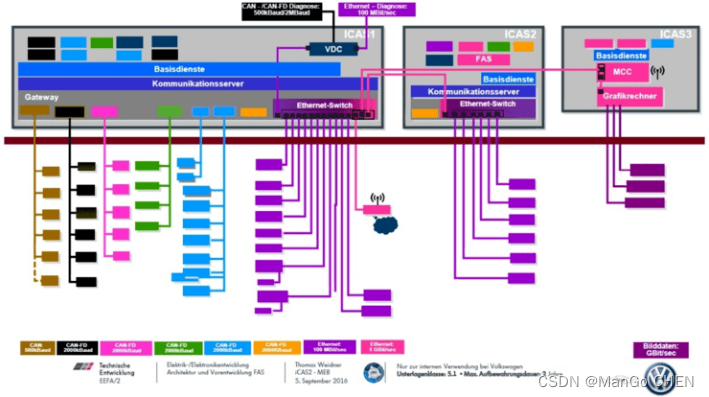
再来看大众。目前大众的MEB平台做了三大控制器,包括:
- 车辆控制域(ICAS1)、
- 智能驾驶域(ICAS2)
- 智能座舱域(ICAS3)
整体还处于功能域阶段,车辆的分布式模块还比较多。
更加传统的车企的电子电气架构集成度更低一些,分为五大域
- 自动驾驶域
- 动力域
- 底盘域
- 座舱域
- 车身域
总体来看,当下特斯拉已经发展到了“位置域”,而大众整体还处于“功能域”阶段。
后者的架构与特斯拉Model S车型的架构水平接近,因此“特斯拉领先大众和丰田六年”的说法不无道理。
2.2.3、整车集中式架构
不过小鹏汽车也表示,特斯拉与大众两个阵营本质上是一条路线演进过程。只不过特斯拉在前,大众稍稍在后罢了。
他认为,“最终域控制器的形态可能就剩一个中央域,通过一个中央计算单元来控制整车功能,就像现在的电脑和手机一样。”
随着域控制器的出现,汽车的智能化演进越来越迅猛。未来最理想的状态是,汽车能够拥有一个整车计算平台——中央大脑。
但这对所有人来说都是一个巨大的挑战,即便是特斯拉,也还在向中央式电子电气架构进发。
那么,从3-5个域控制器向中央式电子电气架构演进,可能还面临哪些挑战?
这个答案涉及方方面面,比如AI芯片的算力能否支持、汽车的操作系统能否跟上、有无成熟的软件供应商等等。
业内人士着重指出:因为中央域控制器可能会成为一台计算机的形态,其中最核心的能力会来源于汽车的操作系统,这个系统需要同时跟上层的软件应用、底层的硬件资源进行衔接。
这是核心亮点也是难点。
3、未来汽车电子的发展趋势
未来汽车电子会呈现以下几大趋势:
- 电子架构集中化
- 更多更复杂的电器总成
- 车与外界的信息互通
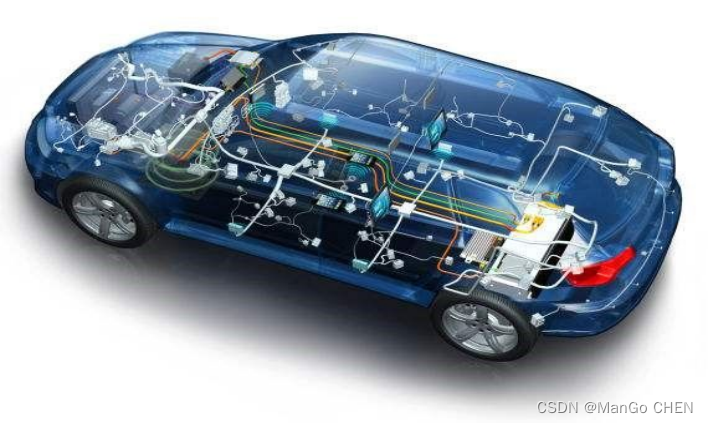
某混合动力电子电气架构系统示意
所谓“电子架构集中化”,指的是汽车电子电气架构集中式发展,汽车会围绕车载计算平台发展,原来的ECU转化为Smart Sensor和Smart执行器+区域控制器的组合,形成软件集中化的特点。
展开来讲,国际汽车巨头以往走的都是供应商外包形式,供应商提供某功能的全套软硬件方案,而每个供应商给出的方案,都包含1个完整而独立的软硬件体系。这使得一台车上的ECU模块可以多达70个,而主机厂对这些模块做深层修改的能力是有限的,还要和各个供应商合作,成本极高。
这一点上,大众集团曾提出过“软件定义汽车,软硬件协同”的理念,开始由传统的供应商外包功能模块向主机厂自研集成化模块方向发展。这是一条极其痛苦但值得尝试的路,随着MEB平台的演进,以及I.D.3等车型的成熟,大众集团正在向电机电气架构集中化的方向努力,奥迪未来的纯电车型也必然将向这个方向发展。
光是ECU的整合还不够,整车线束的革新也是个必然趋势。怎么理解呢?传感器就好比人的眼耳口鼻,ECU则是大脑,整车线束就像人的神经系统,负责传递信号和数据。随着自动驾驶的需求进一步发展,传感器越来越多、信息量越来越大,传统的CAN网络虽然成熟稳定,但其捉襟见肘的带宽已经不堪重负。所以,搭建一条连接传感器和ECU的高速公路势在必行。
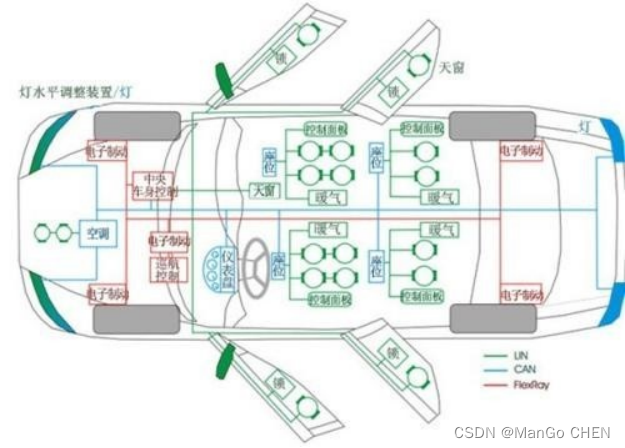
整车网络线束图
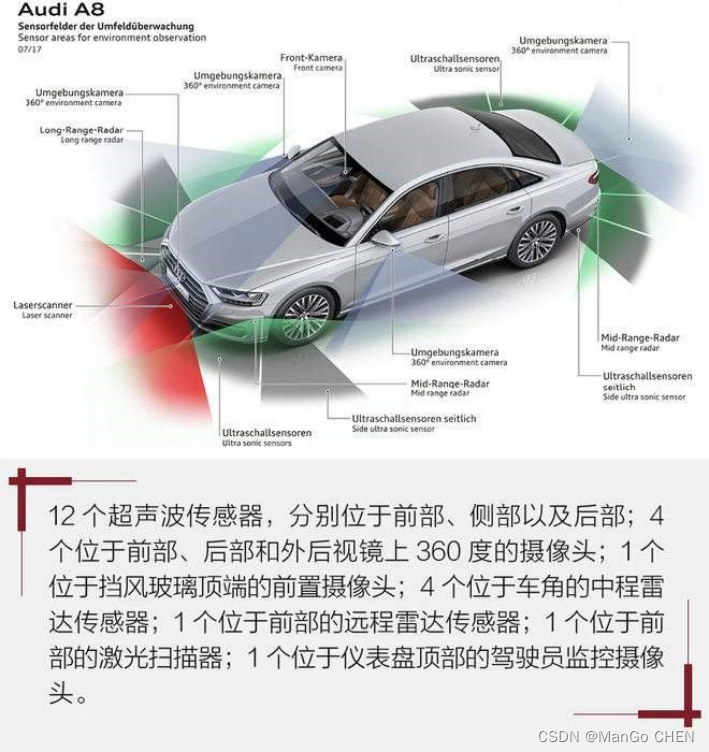
CAN+FlexRay正在成为主流。好在,现在有了FlexRay总线系统,甚至更快的以太网。FlexRay正处于快速普及阶段,以奥迪A8为例,相比传统的CAN网络,A8上面采用的FlexRay+CAN融合的形式可以大大提升带宽,自动驾驶中更多的传感器也可以更高效、安全地传输信息,安全冗余更大。由CAN向FlexRay,再到以太网架构,是未来汽车电子发展的大趋势。这种路线就像低等生物的神经网络向高等生物进化一样,前者只能做出简单的应激反应,只能被动地趋利避害;而后者则是大脑、神经中枢和神经末梢组成的复杂且高效的体系,有自己的思维和判断——未来的汽车也会如此。
高效的信息通路是“基建”,是为ECU和传感器服务的。刚才说到,ECU的集成度会越来越高、算力越来越强,而传感器这边,感知的层次则会更加多样。
4、汽车电子控制器由MCU向AI仿真芯片发展
传统汽车功能简单,与外界交互较少,常为分布式 ECU,主要为等待指令、停机指令、空操作指令、中断指令等各类控制指令,运算速度较低,其运算单位为 DMIPS(百万条指令/秒)、且存储较小,代表厂商如英飞凌、瑞萨、德州仪器、恩智浦、意法半导体等;智能网联汽车,不仅需要与人交互,也需要大量与外界环境甚至云数据中心交互,将面临巨大非结构化数据处理需求,车端中央计算平台将需要500+DMIPS的控制指令运算能力、300+TOPS的 AI 算力。因此汽车芯片结构形式由 MCU 向 SOC 异构芯片方向发展。SoC 是一颗系统级芯片,由 CPU+GPU+DSP+NPU+各种外设接口、存储类型等电子元件组成。SOC 较 MCU 集成程度更高,集成 AI 处理单元/音频处理单元DSP/图像处理单元 GPU/ 深度学习加速单元 NPU 等,功能更复杂,片上互联利于集成电路之间的高速互通互联,资源利用效率更高。SOC 芯片上有丰富的软件配套(工具链、编译器等),提升了处理效率。车载SOC芯片代表产品如华为昇腾系列芯片、地平线征程系列芯片、寒武纪的 MLU 系列芯片、特斯拉FSD等。

虽然大家都在说软件定义汽车,但有没有成熟的软件商业模式?其实大家还没有摸索出来。
因为以往供应商大多提供的是软硬件一体的服务,很少有专门的汽车软件供应平台,并且能够适应各种芯片平台。
因此,寄身于域控制器的软件能力成为了各个玩家追逐的重中之重。

华为MDC智能驾驶计算平台
该业内人士也澄清道:很多人会误以为域控制器其实只是个盒子,实则不然,软件才是域控制器的灵魂(前提需要芯片算力跟得上)。
所以,从分布式架构到集中式架构的难点,不在于ECU物理模块的取消,而是在于如何将原本分布式的软件进行集成。
以智能驾驶域控制器为例,福瑞泰克系统专家喻清舟:
域控制器的软件算法其实包含三层:
- 最底层的是摄像头等传感器算法、
- 第二层是基本的行车功能算法软件(包含L2级辅助驾驶功能),
- 第三层则是一些高级智能驾驶功能比如领航辅助驾驶。
这三个层面的功能,很少有主机厂能够完全自主研发,多多少少要与供应商合作。
“说白了,如果主机厂要上域控制器,就一定要把原来的那套东西给扔掉。但扔掉之后,又会对主机厂的底层能力提出很高的要求。”上述业内人士说道。
所以,在传统产业链难以掉头,新的软件生态尚不成熟的背景下,很多传统主机厂正在艰难地破旧立新。
但对于特斯拉、国内新造车等玩家来说,没有太多的历史包袱与体系包袱,只要肯在自主研发道路上下狠功夫,集中式的电子电气架构之路可能会走得更加轻松一些。
5、总结
任何行业变革的开始,总是伴随着利益的冲突与规则的破立,在这场由ECU消亡引发的变革里亦是如此。
在整车电子电气架构向中央式演进的过程中,“软件定义汽车”热潮之下也隐藏着诸多赛道和企业崛起的可能性。
域控制器的出现,只是一个中场战事。
未来可以确定的是,汽车的“中央大脑”形态变革,以及背后的智能汽车时代话语权争夺,会让产业链上的各种玩家前赴后继。