计算图的设计思路
什么是计算图
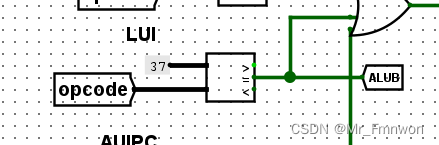
在深度学习推理框架中,计算图是一种数据结构,它由算子节点和数据节点组成,在该图中前向传播时数据从输入节点开始流动,经过一层层的计算后输出到输出节点,表示深度学习模型的计算过程。
与神经网络架构图类似,计算图也是一种有向图,使用节点来表示操作或变量,并使用边来表示它们之间的依赖关系。不同之处在于,神经网络架构图通常只描述了神经元之间的连接方式,而计算图可以精确地表示深度学习模型的计算逻辑。
计算图和神经网络架构图的区别在于,神经网络架构图仅仅是一张有连接关系的图,它主要用来可视化模型的结构展示,包括每层神经元的数目、连接方式等;而计算图则更关注深度学习模型的计算过程,包括每个节点的具体操作定义、输入输出张量的尺寸大小等。
此外,计算图还支持对图上的操作进行修改,如节点之间的添加、删除、重组等。
为什么要封装PNNX作为本项目的计算图
PyTorch Neural Network eXchange(PNNX)是一个旨在提高深度学习模型部署效率的开源工具,由PyTorch社区推出。
PNNX充分利用了PyTorch的动态图机制和ONNX的静态图机制,实现了模型的转换和优化,并提供了一些功能强大的应用程序接口,可帮助用户快速地将训练好的PyTorch模型部署到生产环境中。
PNNX帮我做了很多的图优化、算子融合的工作,所以底层的用它PNNX的话,我们可以吸收图优化的结果,后面推理更快。
PNNX的格式定义
Operator(操作符)
- Inputs: std::vector<operand*>,输入操作数
- Outputs: std::vector<operand*>,输出操作数
- Type: std::string,运算符的类型
- Name: std::string,运算符的名称
- Params: std::map,存放运算符的所有参数,例如卷积运算的stride, padding, kernel size
- Attrs: std::map,存放运算符所需的具体权重属性,例如卷积的权重w和偏移量b
Operand(操作数)
- Producer: operator,产生这个操作数的运算符,表示运算符的输出,只能有一个生产者
- Customer: operator,下一个操作需要该操作数作为输入的运算符,表示运算符的输入,可以有多个消费者
- Name: std::string,操作数的名称
- shape: std::vector,操作数的维度
算子节点(计算节点)的定义
在本项目中,我们参考PNNX::operator和PNNX::operand,定义了RuntimeOperator和RuntimeOperand。
RuntimeOperand
- std::string name; /// 操作数的名称
- std::vector<int32_t> shapes; /// 操作数的形状
- std::vector<std::shared_ptr<Tensor>> datas; /// 存储操作数
- RuntimeDataType type = RuntimeDataType::kTypeUnknown; /// 操作数的类型,一般是float
RuntimeOperator
-
int32_t meet_num = 0; /// 计算节点被相连接节点访问到的次数
-
std::string name; /// 计算节点的名称
-
std::string type; /// 计算节点的类型
-
std::shared_ptr layer; /// 节点对应的计算Layer
-
std::map<std::string, RuntimeParameter*> params; /// 算子的参数信息
-
std::map<std::string, std::shared_ptr> attribute; /// 算子的属性信息,内含权重信息
-
std::vectorstd::string output_names; /// 后继节点名称
-
std::map<std::string, std::shared_ptr> output_operators; /// 后继节点
-
std::map<std::string, std::shared_ptr> input_operands; /// 节点的输入操作数
-
std::vector<std::shared_ptr> input_operands_seq; /// 节点的输入操作数,顺序排列
-
std::shared_ptr output_operands; /// 节点的输出操作数
值得注意的是,我们把算子节点拆分成输入操作数、输出操作数、算子的属性和参数以及算子的实现。
算子参数RuntimeParameter拷贝pnnx::Parameter,表示具体的权重数值、偏移数值等;
算子属性RuntimeAttribute拷贝pnnx::Attribute,表示具体的权重维度尺寸、偏移维度尺寸等;
在深度学习框架中,算子的实现抽象为layer,也就是神经网络架构中的层,
使用算子参数和算子属性来实例化layer,然后在layer的forward前向传播函数中,以输入操作数和输出操作数作为输入,把计算结果保存到输出操作数中。
此外,RuntimeOperator存储了后继节点的名称和指针,方便我们构建计算图。
如何构建计算图
RuntimeGraph的定义
RuntimeGraph中有一个存放RuntimeOperator指针的vector,而RuntimeOperator中有一个存储后继节点的成员变量,因此只需要记录输入和输出节点,就可以构成一个计算图了。
- GraphState:一个枚举类,代表计算图的状态。具体来说,枚举值为NeedInit表示计算图需要初始化,NeedBuild表示计算图需要构建,Complete表示计算图已完成。
- graph_state_:一个GraphState类型的变量,用于保存计算图的状态。
- input_name_:一个字符串类型的变量,表示计算图输入节点的名称。
- output_name_:一个字符串类型的变量,表示计算图输出节点的名称。
- param_path_:一个字符串类型的变量,表示计算图的结构文件路径。
- bin_path_:一个字符串类型的变量,表示计算图的权重文件路径。
- input_operators_maps_:一个映射类型的变量,保存计算图的输入节点和对应的RuntimeOperator对象。
- output_operators_maps_:一个映射类型的变量,保存计算图的输出节点和对应的RuntimeOperator对象。
- operators_:一个vector类型的变量,保存计算图的中间计算节点和对应的RuntimeOperator对象。
- graph_:一个pnnx::Graph类型的智能指针,用于保存完整的计算图。
RuntimeGraph初始化过程
-
首先判断计算图的结构文件和权重文件路径是否为空。如果其中有任何一个为空,就输出错误信息并返回false,表示初始化失败。
-
使用pnnx库中的load()函数从计算图的结构文件和权重文件中读取完整的计算图,保存在类的私有成员变量graph_中。如果读取出错,则输出错误信息并返回false,表示初始化失败。
-
从graph_中获取所有的Operator对象,保存在一个vector类型的变量operators中。如果operators为空,说明读取图层定义失败,返回false,表示初始化失败。
-
遍历operators,对于每一个Operator对象,做以下几个操作:
-
创建一个RuntimeOperator对象,并初始化其名称、类型等基本属性。
-
获取Operator的输入Operand,调用InitGraphOperatorsInput()函数将其保存在RuntimeOperator对象中。
-
获取Operator的输出Operand,调用InitGraphOperatorsOutput()函数将其保存在RuntimeOperator对象中。
-
获取Operator的Attribute(权重),调用InitGraphAttrs()函数将其保存在RuntimeOperator对象中。
-
获取Operator的Parameter,调用InitGraphParams()函数将其保存在RuntimeOperator对象中。
-
将处理完毕的RuntimeOperator对象保存在一个vector类型的变量operators_中。
-
将计算图的状态设置为NeedBuild,表示准备好了计算图的推理。
-
返回true,表示初始化成功。
构建计算图中各个节点之间的关系
-
首先检查计算图的状态。如果其状态是NeedInit,则调用Init()函数初始化计算图;如果状态小于NeedBuild,则输出错误信息并返回。
-
检查计算图中是否存在节点。如果不存在,说明计算图没有成功初始化,输出错误信息并返回。
-
如果计算图状态已经是Complete,说明计算图已经构建完成,直接返回即可。
-
对计算图中的每一个节点进行遍历,分别获取其所有的输出节点名称,并寻找其余节点中是否存在名称符合这些输出节点名称的节点。如果存在则将其余节点保存到当前节点的后继节点列表中。
-
构建完毕后,清空输入节点和输出节点列表,对于每一个节点,根据类型创建相应的Layer对象,并将其保存在节点的layer成员变量中。
-
初始化各个节点的输入和输出数据格式。
-
将计算图状态设置为Complete。
-
保存输入和输出节点名称。
-
释放graph_智能指针,以便释放计算图的内存占用。
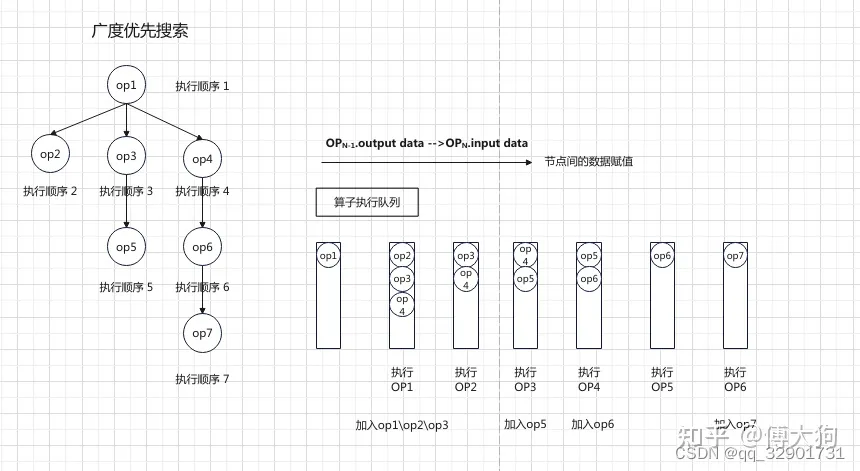
计算图的前向传播过程
计算图的前向传播采用了图的广度优先搜索算法来执行。
广度优先搜索执行的实现是使用一个队列,将一个节点的入度为0的后继节点放入到队列中,并在下一轮循环中按照先进先出的顺序对队列中的节点进行执行。
-
检查计算图状态是否为Complete。如果状态小于Complete,则输出错误信息并中止推理。
-
在计算图中找到输入节点和输出节点。
-
创建一个待执行队列,将输入节点添加到队列的末尾。
-
如果开启debug模式,输出一些调试信息。
-
开始遍历待执行队列,每次从队列头取出一个节点。如果当前节点是输出节点,则说明前向传播结束;否则根据当前节点类型选择相应的运行流程。
-
如果当前节点是输入节点,直接将输入数据拷贝到当前节点后继节点中,向队列尾部添加后继节点。
-
如果当前节点是其他待执行节点,则判断是否就绪。
- 如果就绪,就准备输入的数据,调用其layer对象的Forward函数进行前向推理,得到节点的输出,调用ProbeNextLayers()函数寻找其后继节点,把节点的输出保存在其后继节点中,并将这些节点添加到待执行队列尾部。
- 如果未就绪,就需要重新被放入到待执行队列当中。
-
记录所有节点的运行时间。
-
最终返回输出节点的输出。
阅读的代码
- include
- runtime
- ir.h
- runtime_ir.hpp
- runtime_parameter.hpp
- runtime_attr.hpp
- runtime_datatype.hpp
- runtime_operand.hpp
- runtime_op.hpp
- store_zip.hpp
- runtime
- source
- runtime
- ir.cpp
- runtime_ir.cpp
- runtime_op.cpp
- store_zip.cpp
- runtime