目录
前言
1.系统描述
2.控制器设计
3.模糊化设计
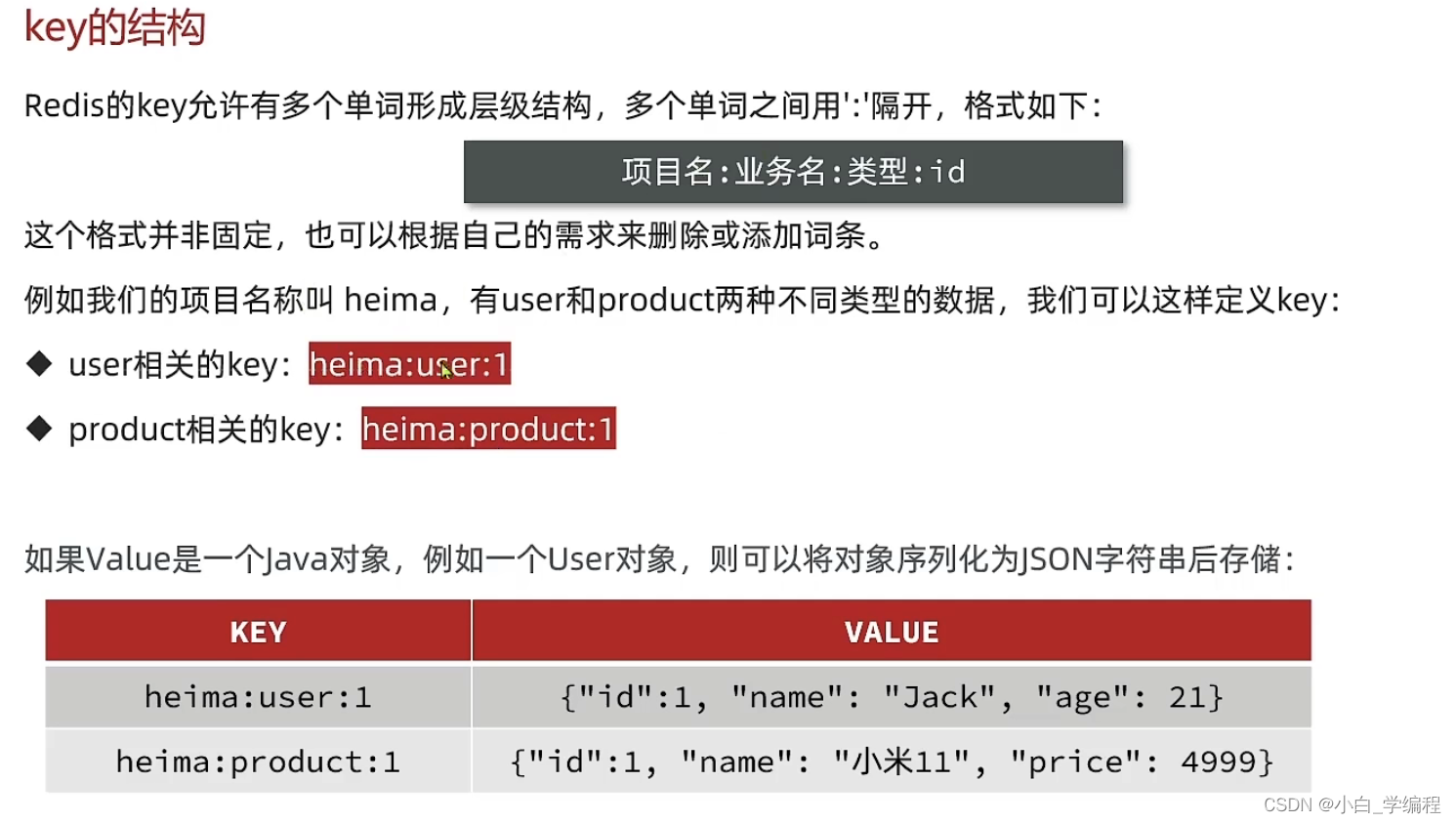
3.1构造模糊系统
3.2自适应律设计
4仿真分析
4.1仿真系统
4.2仿真结果
前言
上几篇文章分别介绍了模糊化切换增益(也就是模糊化外界扰动d)、模糊化系统部分的不确定项f、模糊化整个切换项,其原理分别为利用滑膜存在条件ss'的关系、状态变量、滑模面s设计隶属度函数构造模糊系统,输出为自适应律,通过自适应律对需要估计的部分进行逼近。今天这篇文章将去逼近系统不确定性f和g,以及外界扰动d,即同时模糊化系统部分的不确定项f、模糊化整个切换项,相当于对前面的文章进行了一个综合。
1.系统描述
和上篇文章一样以n阶系统为例:
其中f和g为已知函数(线性或者非线性均可),dt为有上届的扰动。
2.控制器设计
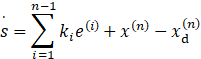
和上几篇文章的设计一模一样,仍以简单的线性滑膜面为例,其实其它类型的滑模面方法都类似
Sliding mode surface:
![]()
其中e=x-xd,ki为满足Hurwitz多项式条件的取值。
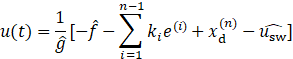
很容易得到我们的控制输入:

其中usw即为切换项/鲁棒项,假定我们选择等速趋近律ηsign(s),其中η > |d|max,且当其为理想参照切换项。
3.模糊化设计
假设系统的f、g和外界扰动d均有界未知,则上述控制器变为:
3.1构造模糊系统
①对系统部分的f和g逼近时,使用xi的隶属度函数均选择gaussmf(x,[pi/12,pi/24-(i-1)*pi/24]),i=1,2,3,4,5。即:
![]()
![]()
![]()
![]()
![]()
总结:使用xi的隶属度函数构造模糊系统f^(xi|θf)和g^(xi|θg),输出为模糊向量ξ和Φ,模糊输出向量用于构造逼近f和g所设计的自适应律θf和θg,且f^ = θf*ξf、g^ = θg*ξg。
②对外界扰动d逼近时,使用滑模面s的隶属度函数均选择s形隶属度函数sigmf(x,[-5,-3+(j-1)*3]),j=1,2,3。即:

总结:使用s的隶属度函数构造模糊系统d^(s|θusw),输出为模糊向量ξusw,模糊输出向量用于构造逼近d所设计的自适应律θusw,且usw^ = θusw*ξusw。
3.2自适应律设计
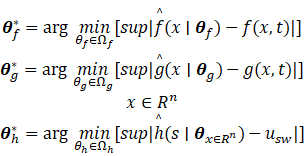
所以自适应律的设计最优值为逼近误差最小时的取值:
定义逼近的误差:
![]()
即:
![]()
符号解释说明:
![]() 指系统中的不确定f;
指系统中的不确定f;
![]() 和
和![]() 指实际取值的自适应律θ时逼近的f(因为逼近也不可能做到没一点误差),即实际逼近的f ;
指实际取值的自适应律θ时逼近的f(因为逼近也不可能做到没一点误差),即实际逼近的f ;
![]() 指取值为最优自适应律参数θf*时逼近的f,即最优逼近的f。
指取值为最优自适应律参数θf*时逼近的f,即最优逼近的f。
同样和上两篇文章一样要求取自适应律,则要进行Lyapunov函数稳定性分析,通过稳定性分析证明来得到自适应律,定义Lyapunov函数:
![]()
其中:
![]()
为了方便运算,对V求导前先运算得到s':

这里由于g是估计的,不能和以往一样直接代入控制输入u,需要进行转化(想办法利用上述的逼近误差表达式) ,先加减g^u

由控制输入:
得到:
消去 ,得到:
,得到:
![]()
将逼近误差表达式:
![]()
代入,得到:
![]()
为了引入实际自适应律与理想自适应律的误差关系,即上面定义Lyapunov函数定义的:
![]()
s'式子加减![]()

![]()
所以Lyapunov函数导数V'=
![]()


由于理想的usw^ = ηsign(s),所以有:
 所以设计如下的自适应律:
所以设计如下的自适应律:
其中r1、r2、r3 > 0。
最终得到V'=
![]()
注:
①这里为了缩写简化,有的地方将usw写成了h。
②θ'为自适应律,下标为对应的不确定项;ξ为模糊基向量,即模糊系统的输出,下标含义同自适应律,(.)表示设计模糊系统所使用的变量,分别为xi和滑模面s。
③自适应律的标准组成形式即为:θ' = 调节参数ri*模糊系统输出ξj。
4仿真分析
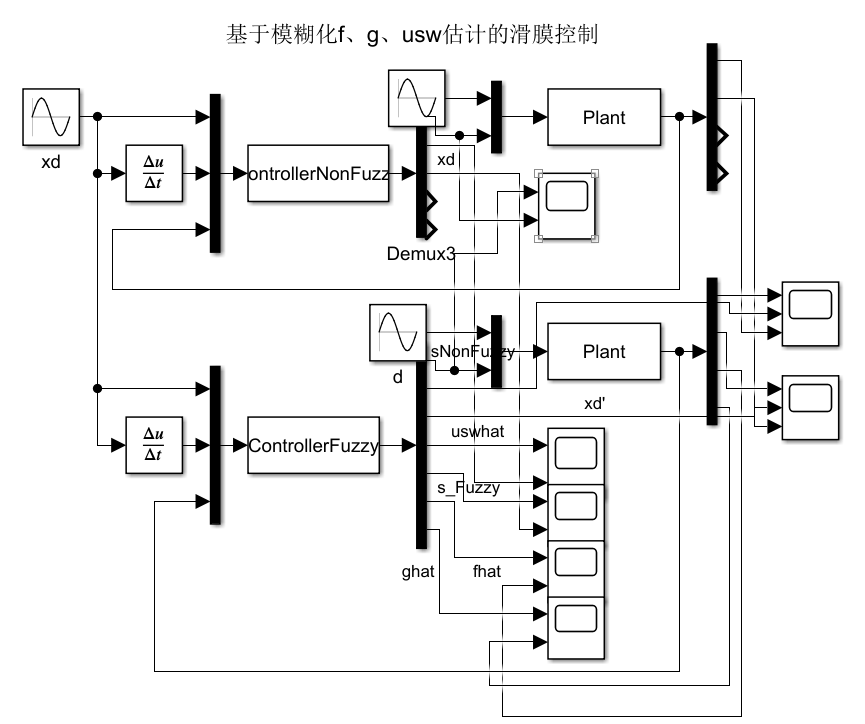
4.1仿真系统
仍采用和前述文章一直的二阶倒立摆非线性系统,并增加扰动d=sin(t):

4.2仿真模型
指令信号xd = 0.1sin(t),且x0=[pi/6;0;0]
4.3仿真结果
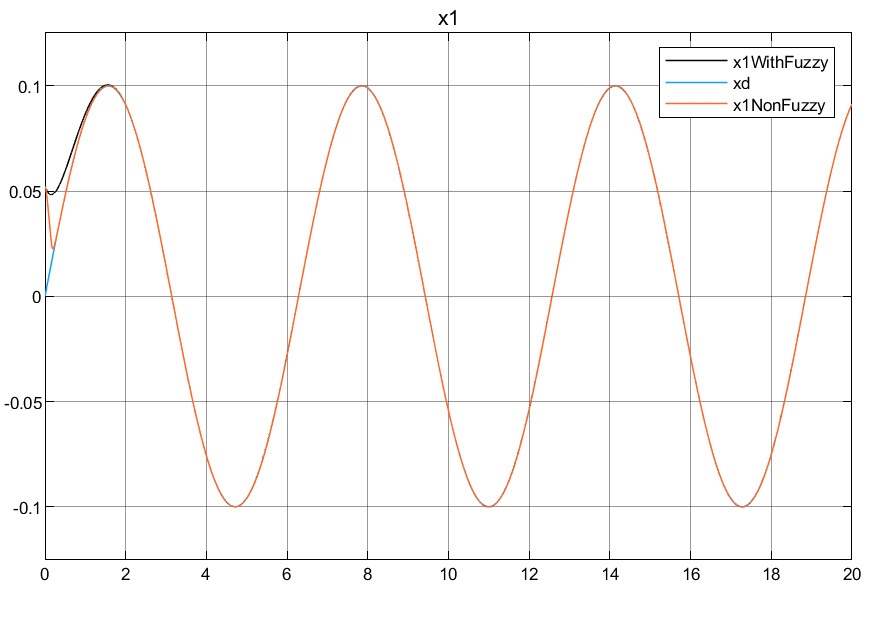
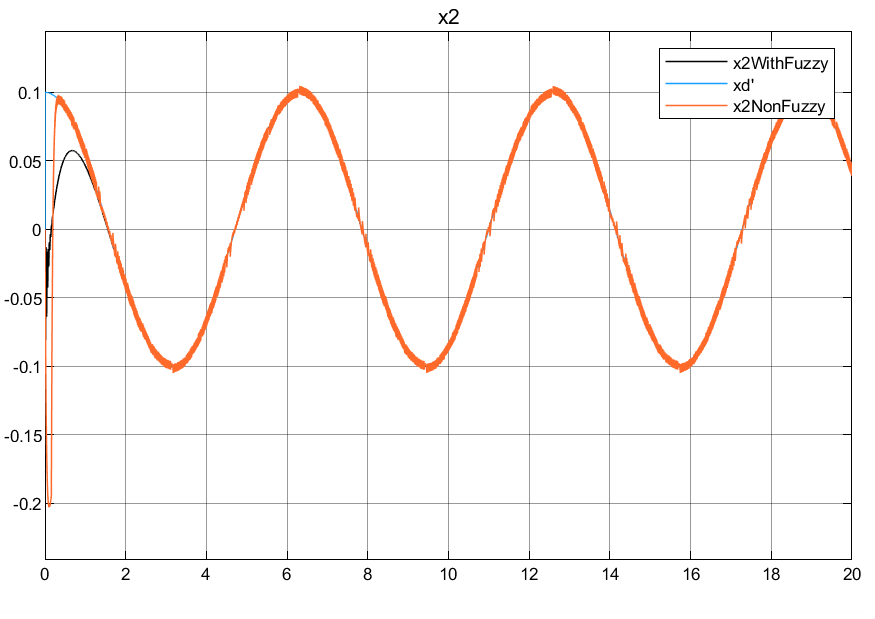
4.3结论
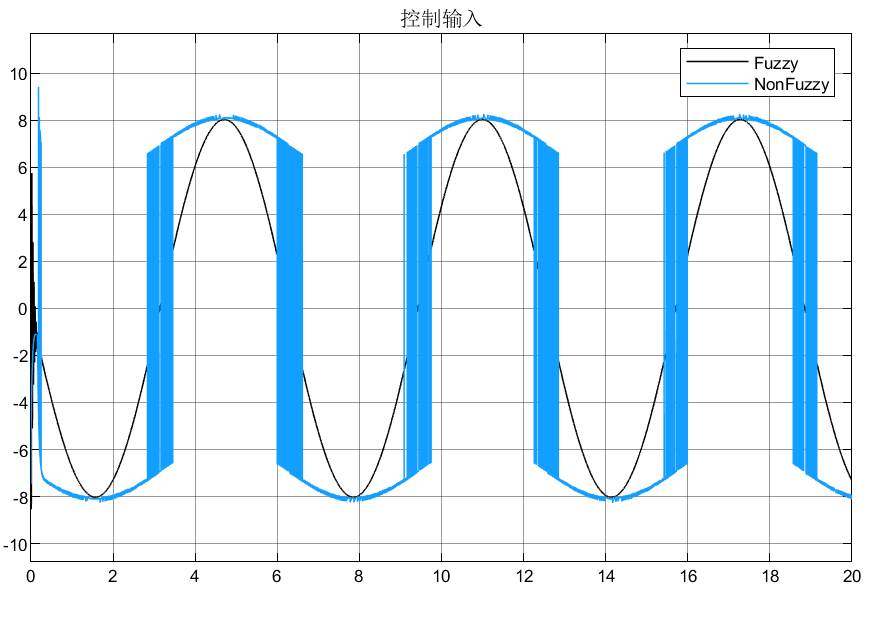
①可以看到基于模糊逼近f、g、usw的滑膜控制在初态响应上优于普通等速趋近律;
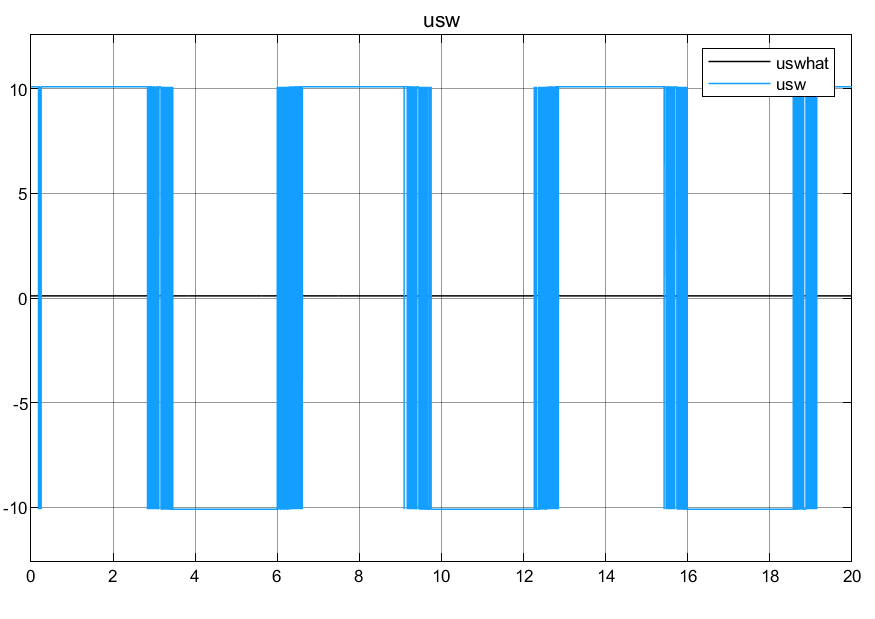
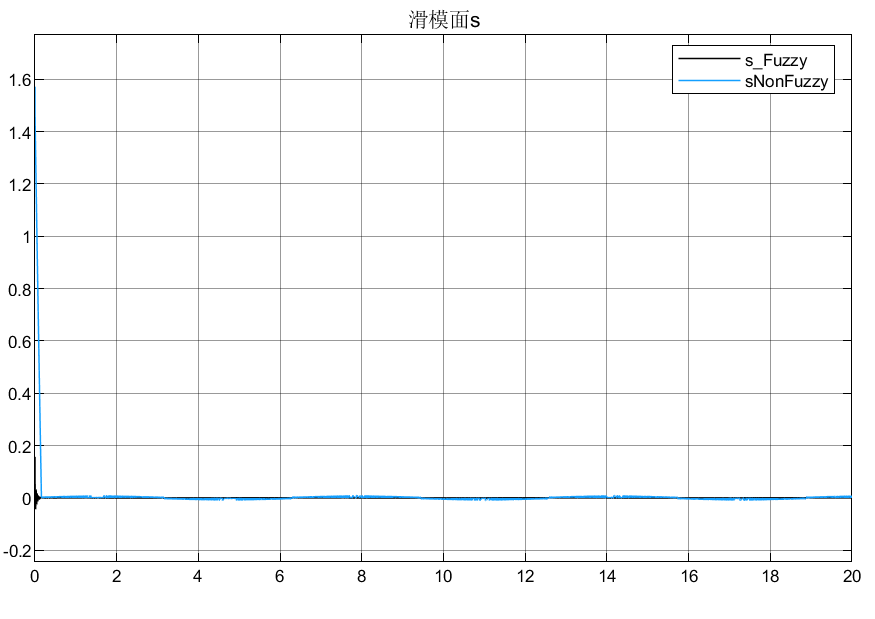
②从切换项估计usw^和滑模面s可以看到模糊滑膜控制抖动更小;
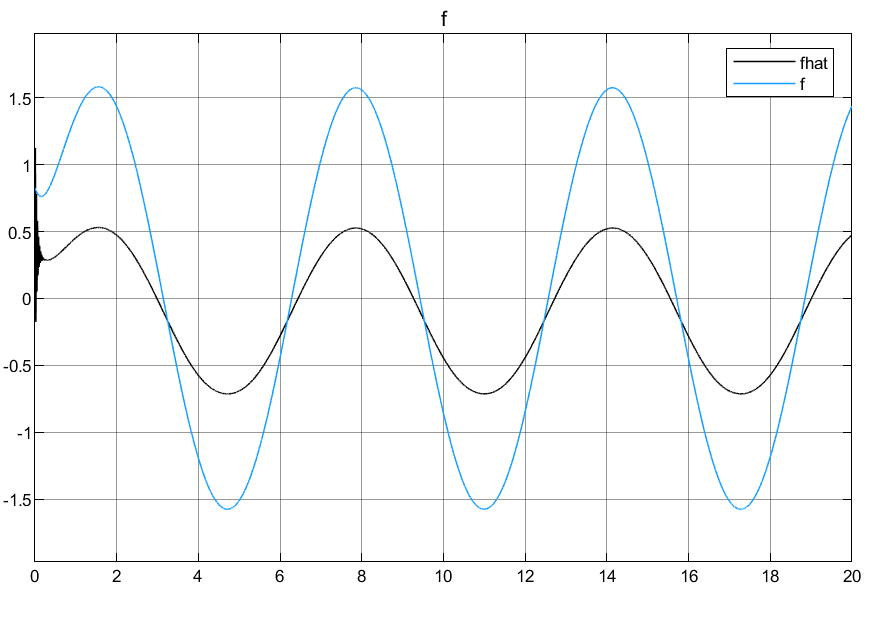
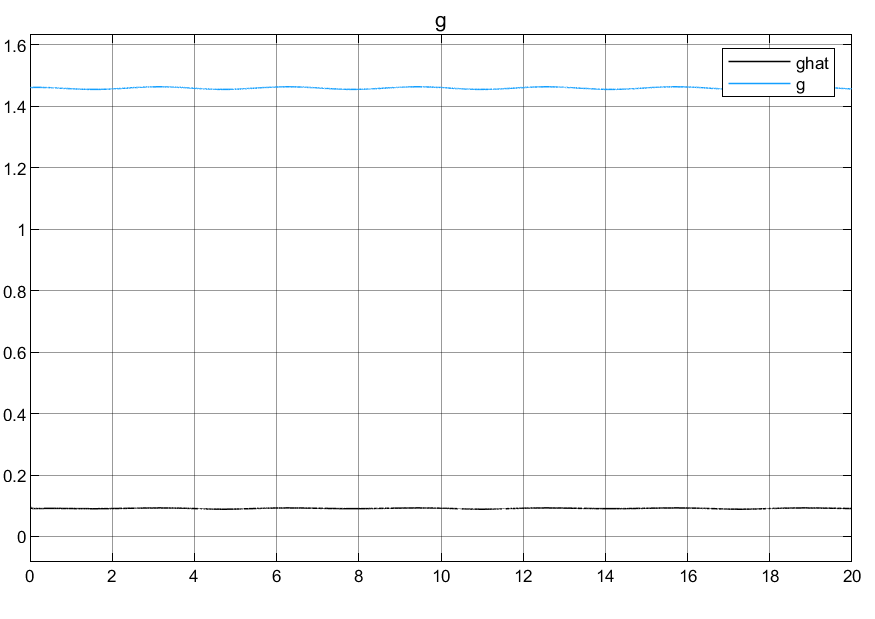
③无论自适应律参数ri怎么调节都无法实现逼近,存在较大的误差。
④而且在参数调节上,ri如果调大会报错,滑模面系数在模糊滑模控制中不能调的很大,但是普通趋近律中可以调大一些。
⑤实际上是利用滑模面s、相应的变量的隶属度函数μi进行估计,自适应律的作用就是模糊输出和调节参数ri的乘积,用于调参逼近不确定;
⑥由于滑模控制律中分母为g^,而自适应律为g^的组成,所以自适应律状态变量初值不能为0,即g^不能为0,否则NAN报错。
注:由于符号太多可能会存在错误,可以指出,后续有时间我也会再去检查,谢谢理解!

![[附源码]计算机毕业设计springboot疫情管理系统](https://img-blog.csdnimg.cn/4c372c0462ab4d11b590dc6b0f7fd793.png)