文章目录
- 前言
- 一、主程序
- 二、update()
- 二、predictState()
- 三、controlFusionModes()
- 四、controlGpsFusion
- 五、fuseGpsVelPos()
- 六、fuseHorizontalVelocity()
- 七、fuseVelPosHeight()
- 八、calculateOutputStates()
前言
PX4 1.13.2
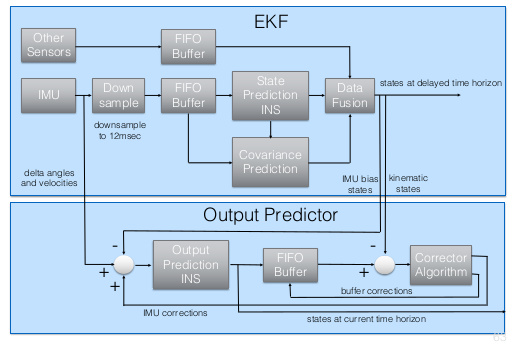
PX4 ekf的传感器数据放在FIFO的环形缓冲区中,每次融合时取最新的数据,融合出的bias直接给输出滤波器,补偿到IMU的数据中,同时EKF融合出的位置速度等数据也要给输出滤波器,根据延时经过补偿输出当前时间线下的状态。
一、主程序
代码位置