关于图的数据结构,我曾经自己学过一部分,图论专栏,但是学习本就是重复的过程,这里打算系统的学习一下图。第一步当然是图的储存和基本操作的实现。
要用C++实现图的基本操作
- Adjacent(x,y):判断图是否存在边<x,y>或(x,y)
- InsertVertex(x):在图中插入节点x
- DeleteVertex(x):在图中删除节点x
- AddEdge(x,y):添加边<x,y>或(x,y)
- RemoveEdge(x,y):删除边<x,y>或(x,y)
- SetEdgeValue(x,y,z):设置边的权值(添加边)
- GetNeighborsPoint(x):获取图中顶点x的邻节点
- PrintGraph():打印保存图的邻接矩阵
文章目录
- 1. 邻接矩阵存储图,并实现基本操作
- 2. 邻接表存储图
- 3. 十字链表法储存
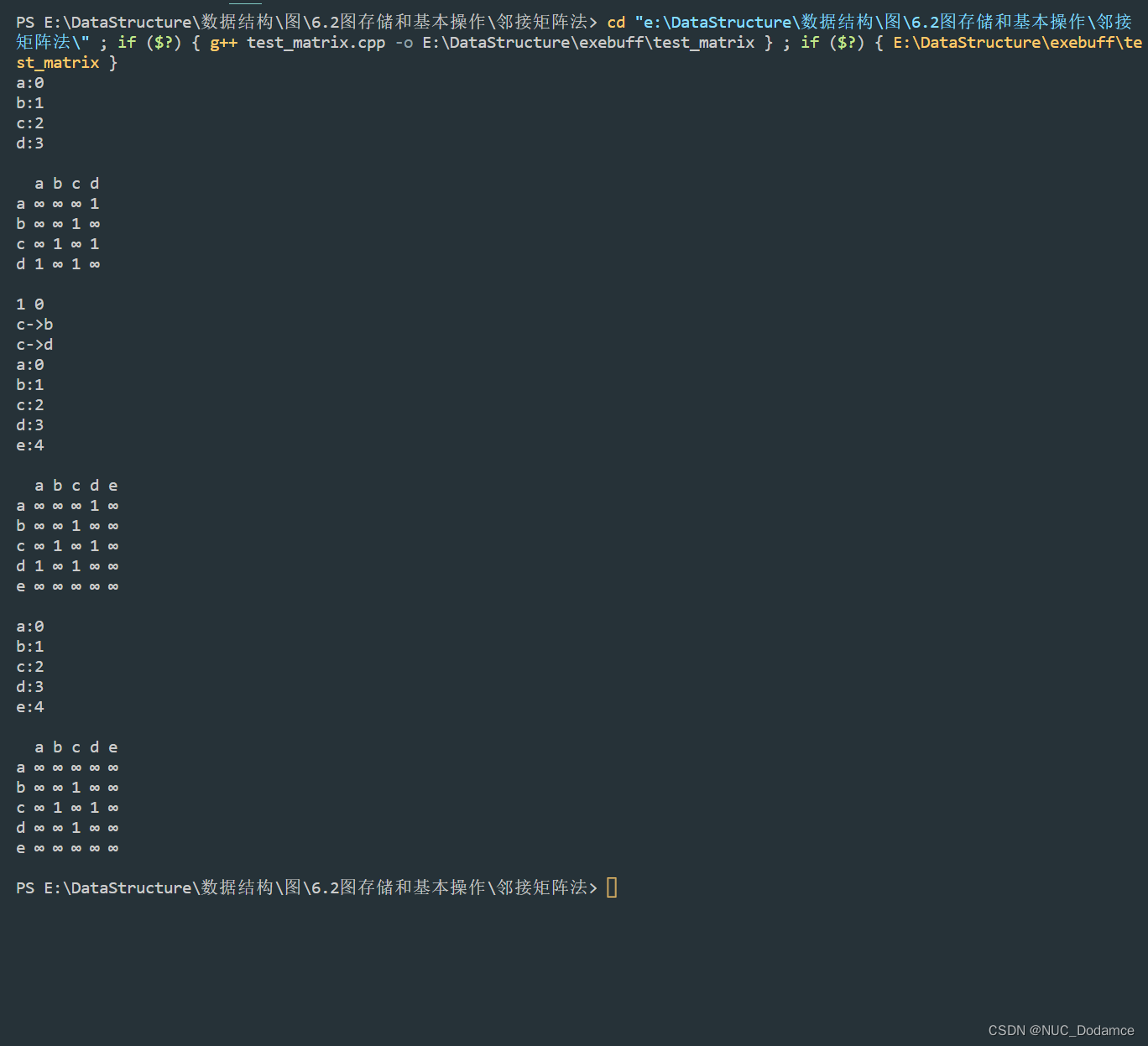
1. 邻接矩阵存储图,并实现基本操作
简单的来讲就是二维数组保存图基本信息:
每一行代表一个顶点,依次从 a 到 b ,每一列也是如此。比如 _matrix[0][1] = weight ,表示 a 和 b 之间有边存在;而 arcs[0][2] = MAX,说明 V1 和 V3 之间没有边。
对于有向图,这个二位数组不是对称的,对于无向图,这个二维数组就是对称的,可以仅仅保留一半。
//邻接矩阵法存储图结构
#include <iostream>
#include <assert.h>
#include <map>
#include <vector>
#include <stdio.h>
// v:图顶点保存的值。w:边的权值 max:最大权值,代表无穷。flag=true代表有向图。否则就是无向图
template <class v, class w, w max = INT_MAX, bool flag = false>
class graph
{
private:
std::vector<v> _verPoint; //顶点集合
std::map<v, int> _indexMap; //顶点与下标的映射
std::vector<std::vector<w>> _matrix; //邻接矩阵
int _getPosPoint(const v &point)
{
if (_indexMap.find(point) != _indexMap.end())
{
return _indexMap[point];
}
else
{
std::cout << point << " not found" << std::endl;
return -1;
}
}
public:
//根据数组来开辟邻接矩阵
graph(const std::vector<v> &src)
{
_verPoint.resize(src.size());
for (int i = 0; i < src.size(); i++)
{
_verPoint[i] = src[i];
_indexMap[src[i]] = i;
}
//初始化邻接矩阵
_matrix.resize(src.size());
for (int i = 0; i < src.size(); i++)
{
_matrix[i].resize(src.size(), max);
}
}
//添加边的关系,输入两个点,以及这两个点连线边的权值。
void AddEdge(const v &pointA, const v &pointB, const w &weight)
{
//获取这个顶点在邻接矩阵中的下标
int posA = _getPosPoint(pointA);
int posB = _getPosPoint(pointB);
_matrix[posA][posB] = weight;
if (!flag)
{
//无向图,邻接矩阵对称
_matrix[posB][posA] = weight;
}
}
//打印邻接矩阵
void PrintGraph()
{
//打印顶点对应的坐标
typename std::map<v, int>::iterator pos = _indexMap.begin();
while (pos != _indexMap.end())
{
std::cout << pos->first << ":" << pos->second << std::endl;
pos++;
}
std::cout << std::endl;
//打印边
printf(" ");
for (int i = 0; i < _verPoint.size(); i++)
{
std::cout << _verPoint[i] << " ";
}
printf("\n");
for (int i = 0; i < _matrix.size(); i++)
{
std::cout << _verPoint[i] << " ";
for (int j = 0; j < _matrix[i].size(); j++)
{
if (_matrix[i][j] == max)
{
//这条边不通
printf("∞ ");
}
else
{
std::cout << _matrix[i][j] << " ";
}
}
printf("\n");
}
printf("\n");
}
//判断图是否存在边<x,y>或(x,y)
bool Adjacent(const v &x, const v &y)
{
return _matrix[_indexMap[x]][_indexMap[y]] != max;
}
//列出图中x相邻的边
std::vector<v> GetNeighborsPoint(const v &x)
{
int index = _indexMap[x];
assert(index >= 0);
std::vector<v> result;
for (int i = 0; i < _matrix[index].size(); i++)
{
if (_matrix[index][i] != max)
{
// std::cout << x << "->" << _verPoint[i] << std::endl;
result.push_back(_verPoint[i]);
}
}
return result;
}
// 在图中插入节点x
void InsertVertex(const v &x)
{
_verPoint.push_back(x);
_indexMap[x] = _verPoint.size() - 1;
for (int i = 0; i < _matrix.size(); i++)
{
_matrix[i].push_back(max);
}
std::vector<w> newLine(_verPoint.size(), max);
_matrix.push_back(newLine);
}
//在图中删除节点x
void DeleteVertex(const v &x)
{
int pos = _indexMap[x];
assert(pos >= 0);
_verPoint.erase(_verPoint.begin() + pos);
_indexMap.erase(x);
_matrix.erase(_matrix.begin() + pos);
for (int i = 0; i < _matrix.size(); i++)
{
_matrix[i].erase(_matrix[i].begin() + pos);
}
}
//删除边<x,y>或(x,y)
void RemoveEdge(const v &x, const v &y)
{
//假定x,y存在,减少代码量
_matrix[_indexMap[x]][_indexMap[y]] = max;
if (!flag)
{
//无向图
_matrix[_indexMap[y]][_indexMap[x]] = max;
}
}
//设置边的权值(添加边)
void SetEdgeValue(const v &x, const v &y, const w &z)
{
//假定x,y存在,减少代码量
_matrix[_indexMap[x]][_indexMap[y]] = z;
if (!flag)
{
//无向图
_matrix[_indexMap[y]][_indexMap[x]] = z;
}
}
};
测试代码:
#include "matrix.h"
using namespace std;
int main(int argc, char const *argv[])
{
vector<char> vet = {'a', 'b', 'c', 'd'};
graph<char, int> graph(vet);
graph.AddEdge('a', 'd', 1);
graph.AddEdge('c', 'b', 1);
graph.AddEdge('c', 'd', 1);
graph.PrintGraph();
std::cout << graph.Adjacent('a', 'd') << " " << graph.Adjacent('a', 'b') << endl;
vector<char> ret = graph.GetNeighborsPoint('c');
for (int i = 0; i < ret.size(); i++)
{
std::cout << 'c' << "->" << ret[i] << std::endl;
}
graph.InsertVertex('e');
graph.PrintGraph();
// graph.DeleteVertex('a');
// graph.PrintGraph();
graph.RemoveEdge('a', 'd');
graph.PrintGraph();
return 0;
}
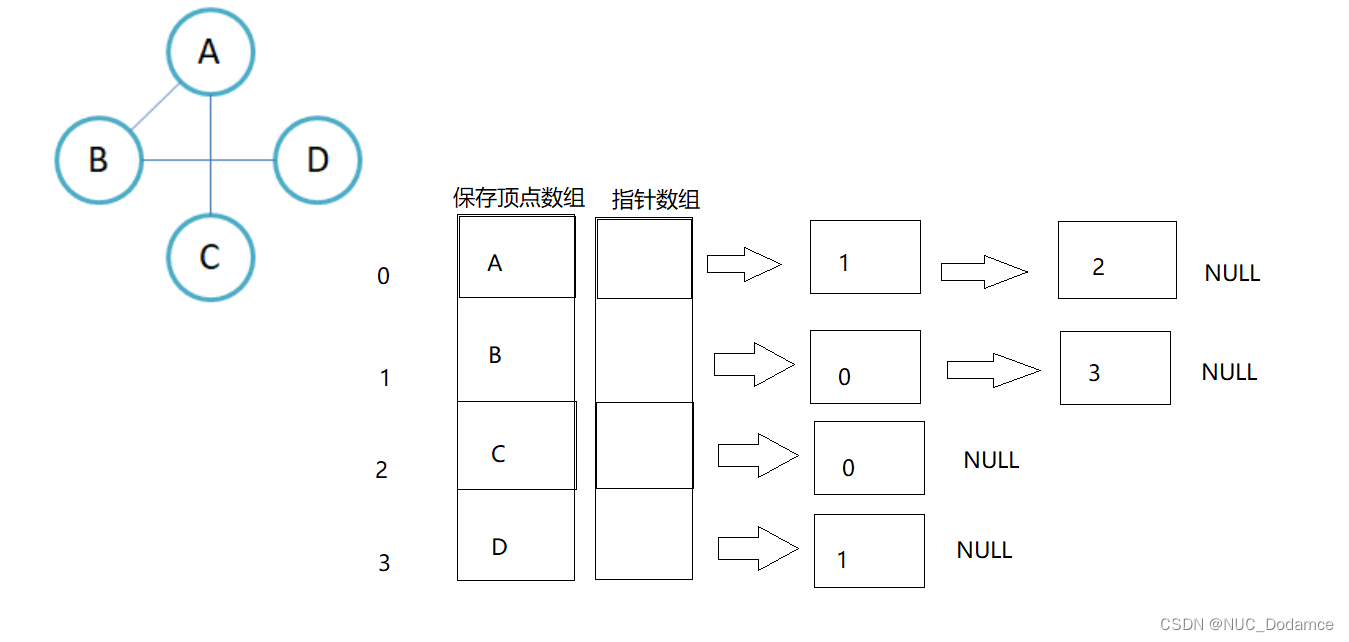
2. 邻接表存储图
邻接表存储图的核心思想是:将图中的所有顶点存储到顺序表中(也可以是链表)。
同时为各个顶点配备一个单链表,用来存储和当前顶点有直接关联的边或者弧(边的一端是该顶点或者弧的弧尾是该顶点)。
eg:
邻接表的优点:
- 适合保存稀疏的边关系。
- 适合查找一个顶点连接出的边
不足:
- 不适合确定两个顶点是否相连,判断权值。
链表节点内的值中保存边执向节点在数组的下标,和这条权值数据。
#include <iostream>
#include <vector>
#include <assert.h>
#include <unordered_map>
template <class w>
struct Edge
{
int dstPos = -1;
w weight; //权值
Edge<w> *next;
Edge(int _dstPos, const w &_weight) : dstPos(_dstPos), weight(_weight), next(nullptr) {}
};
// v:节点的值,w节点的权值 flag==false为无向图
template <class v, class w, bool flag = false>
class linkTable
{
typedef Edge<w> Edge;
private:
std::vector<Edge *> _matrix; //邻接表
std::unordered_map<v, int> _indexMap; //保存图节点对应邻接表数组的下标
std::vector<v> _points; //顶点集合
int _getPointPos(const v &point)
{
typename std::unordered_map<v, int>::iterator pos = _indexMap.find(point);
if (pos == _indexMap.end())
return -1; //没找到
return pos->second;
}
public:
linkTable(const std::vector<v> &src)
{
int size = src.size();
assert(size > 0);
_points.resize(size);
for (int i = 0; i < size; i++)
{
_points[i] = src[i];
_indexMap[src[i]] = i;
}
_matrix.resize(size, nullptr);
}
//添加边的关系
void AddEdge(const v &src, const v &dst, const w &weight)
{
int posSrc = _getPointPos(src);
int posDst = _getPointPos(dst);
assert(posSrc >= 0 && posSrc >= 0);
//构建Edge,头插到数组上
Edge *edge = new Edge(posDst, weight);
edge->next = _matrix[posSrc];
_matrix[posSrc] = edge;
if (!flag)
{
//无向图,两条边都要构建
edge = new Edge(posSrc, weight);
edge->next = _matrix[posDst];
_matrix[posDst] = edge;
}
}
//打印邻接表信息
void PrintGraph()
{
for (int i = 0; i < _matrix.size(); i++)
{
Edge *edge = _matrix[i];
while (edge != nullptr)
{
std::cout << _points[i] << "->";
std::cout << _points[edge->dstPos] << "权值:" << edge->weight << std::endl;
edge = edge->next;
}
std::cout << "--------------------------------" << std::endl;
}
}
};
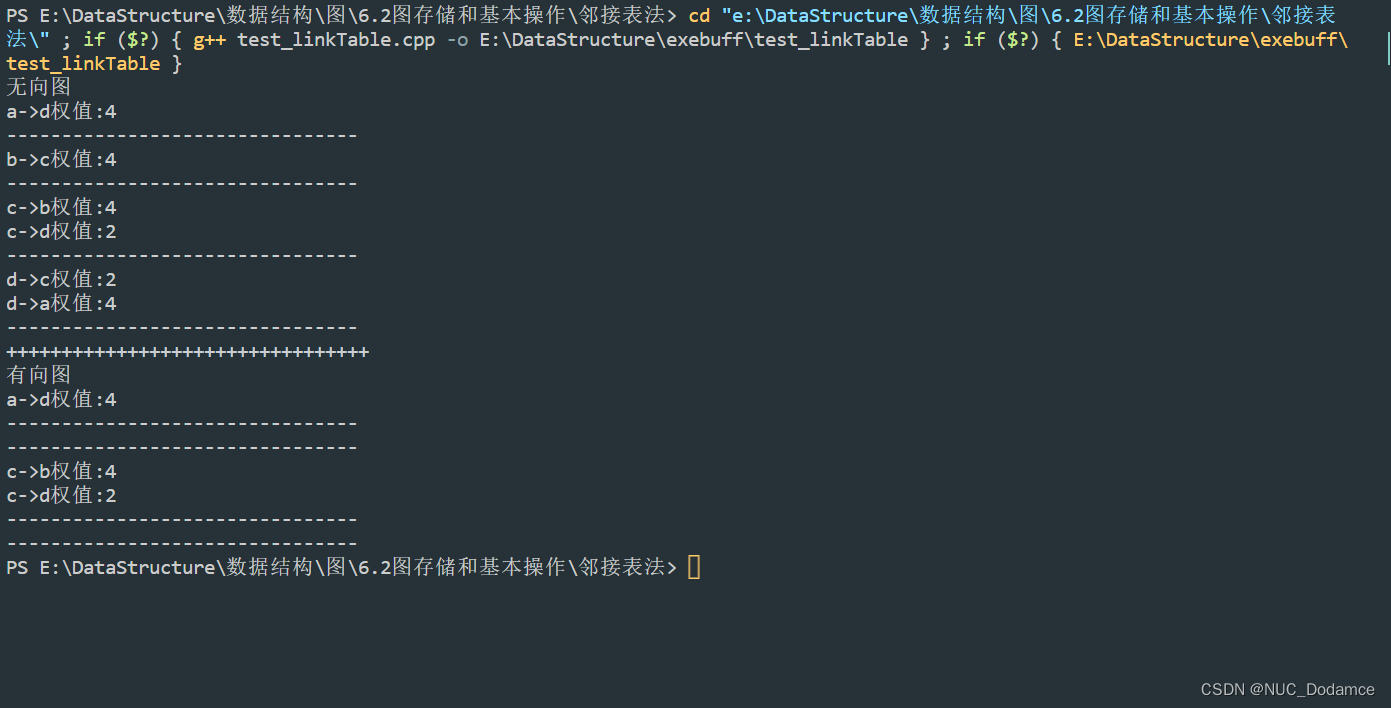
测试代码:
#include "linkTable.h"
int main(int argc, char const *argv[])
{
std::cout << "无向图" << std::endl;
linkTable<char, int> graph({'a', 'b', 'c', 'd'});
graph.AddEdge('a', 'd', 4);
graph.AddEdge('c', 'd', 2);
graph.AddEdge('c', 'b', 4);
graph.PrintGraph();
std::cout << "+++++++++++++++++++++++++++++++++" << std::endl;
std::cout << "有向图" << std::endl;
linkTable<char, int, true> graph2({'a', 'b', 'c', 'd'});
graph2.AddEdge('a', 'd', 4);
graph2.AddEdge('c', 'd', 2);
graph2.AddEdge('c', 'b', 4);
graph2.PrintGraph();
return 0;
}
3. 十字链表法储存
用邻接表存储有向图(网),可以快速计算出某个顶点的出度,但计算入度的效率不高。反之,用逆邻接表存储有向图(网),可以快速计算出某个顶点的入度,但计算出度的效率不高。
为了解决快速计算有向图(网)中某个顶点的入度和出度,这里采用十字链表这种种存储结构。
十字链表(Orthogonal List)是一种专门存储有向图(网)的结构,它的核心思想是:
将图中的所有顶点存储到顺序表(也可以是链表)中,同时为每个顶点配备两个链表,一个链表记录以当前顶点为弧头的弧,另一个链表记录以当前顶点为弧尾的弧。
eg:
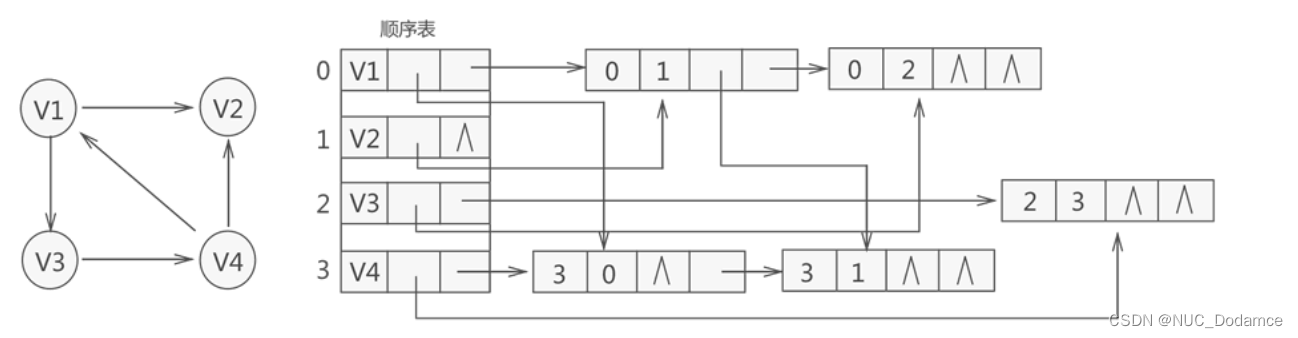
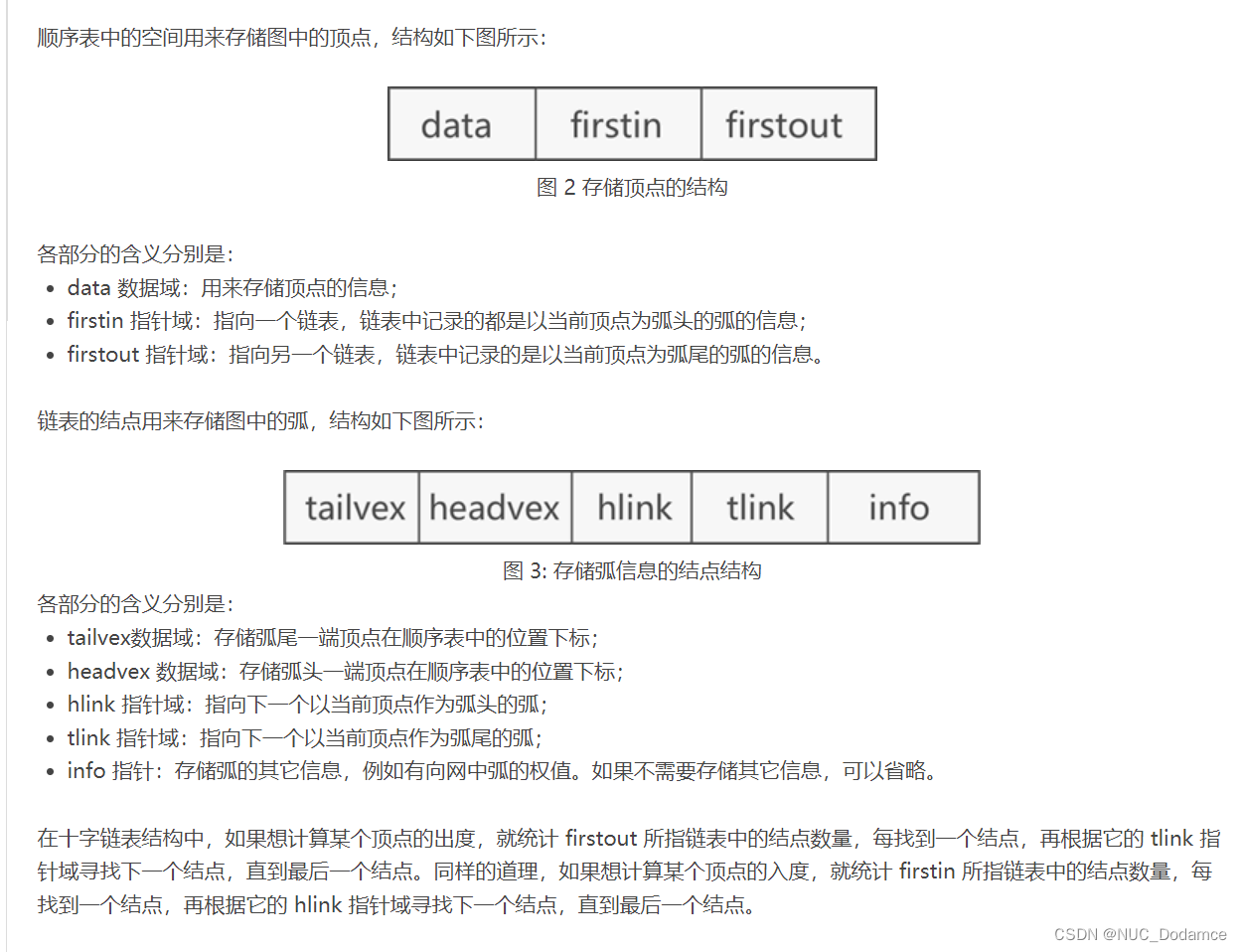
顺序表节点数据定义:图片来源
#include <iostream>
#include <unordered_map>
#include <vector>
#include <assert.h>
struct Data
{
int tailpos = -1; //弧尾在顺序表的位置下标
int headpos = -1; //弧头在顺序表的位置下标
Data *head_link = nullptr;
Data *tail_link = nullptr;
// head_lik指向下一个以当前顶点为弧头的弧结点;(指入这个节点)
// tail_link 指向下一个以当前顶点为弧尾的弧结点;(指出这个节点)
int weight; //保存弧权值
};
struct TableNode
{
char val = 0; //图节点的值
Data *in = nullptr;
Data *out = nullptr;
//指向以该顶点为弧头(指入这个节点)和弧尾(指出这个节点)的链表首个结点
};
class FrontTailList
{
private:
std::vector<TableNode> _verPoint; //顶点集合
std::unordered_map<char, int> _indexMap; //顶点与下标的映射
std::vector<std::vector<int>> _matrix; //邻接矩阵
bool flag = false; //标记这个图是有向还是无向,false默认无向
bool isDel = false;
int _getPosPoint(const char point)
{
if (_indexMap.find(point) != _indexMap.end())
{
return _indexMap[point];
}
else
{
std::cout << point << " not found" << std::endl;
return -1;
}
}
public:
FrontTailList(const std::vector<char> &src, bool flag)
{
this->flag = flag;
_verPoint.resize(src.size());
_matrix.resize(src.size());
for (int i = 0; i < src.size(); i++)
{
_indexMap[src[i]] = i;
_matrix[i].resize(src.size(), INT_MAX);
}
}
void AddEdge(const char pointA, const char pointB, int weight)
{
int indexA = _getPosPoint(pointA);
int indexB = _getPosPoint(pointB);
assert(indexA >= 0 && indexB >= 0);
_matrix[indexA][indexB] = weight;
Data *link = new Data;
link->headpos = indexB;
link->tailpos = indexA;
link->weight = weight;
//采用头插法插入新的节点
// indexB的入度节点就是pointA这个节点,这里选择头插法插入。
link->head_link = _verPoint[indexB].in;
link->tail_link = _verPoint[indexA].out;
_verPoint[indexB].in = link;
_verPoint[indexA].out = link;
if (!flag && !isDel)
{
//无向图
isDel = true; //记录这次的无向图,两条边已经处理过了。
AddEdge(pointB, pointA, weight);
}
//退出条件后说明这条边添加完毕,为了下次添加边的时候还可以解决无向图问题,这里将isDel恢复原状
isDel = false;
}
//打印邻接矩阵
void PrintGraph()
{
//打印顶点对应的坐标
typename std::unordered_map<char, int>::iterator pos = _indexMap.begin();
while (pos != _indexMap.end())
{
std::cout << pos->first << ":" << pos->second << std::endl;
pos++;
}
std::cout << std::endl;
//打印边
printf(" ");
for (int i = 0; i < _verPoint.size(); i++)
{
std::cout << _verPoint[i].val << " ";
}
printf("\n");
for (int i = 0; i < _matrix.size(); i++)
{
std::cout << _verPoint[i].val << " ";
for (int j = 0; j < _matrix[i].size(); j++)
{
if (_matrix[i][j] == INT_MAX)
{
//这条边不通
printf("∞ ");
}
else
{
std::cout << _matrix[i][j] << " ";
}
}
printf("\n");
}
printf("\n");
}
//计算某个点的出度和入度
int InDegree(const char point)
{
int pos = _getPosPoint(point);
if (pos < 0)
{
std::cout << "图中没有这个节点" << std::endl;
return -1;
}
int ret = 0;
Data *node = _verPoint[pos].in;
while (node != nullptr)
{
ret += 1;
node = node->head_link;
}
return ret;
}
int OutDegree(const char point)
{
int pos = _getPosPoint(point);
if (pos < 0)
{
std::cout << "图中没有这个节点" << std::endl;
return -1;
}
int ret = 0;
Data *node = _verPoint[pos].out;
while (node != nullptr)
{
ret += 1;
node = node->tail_link;
}
return ret;
}
};
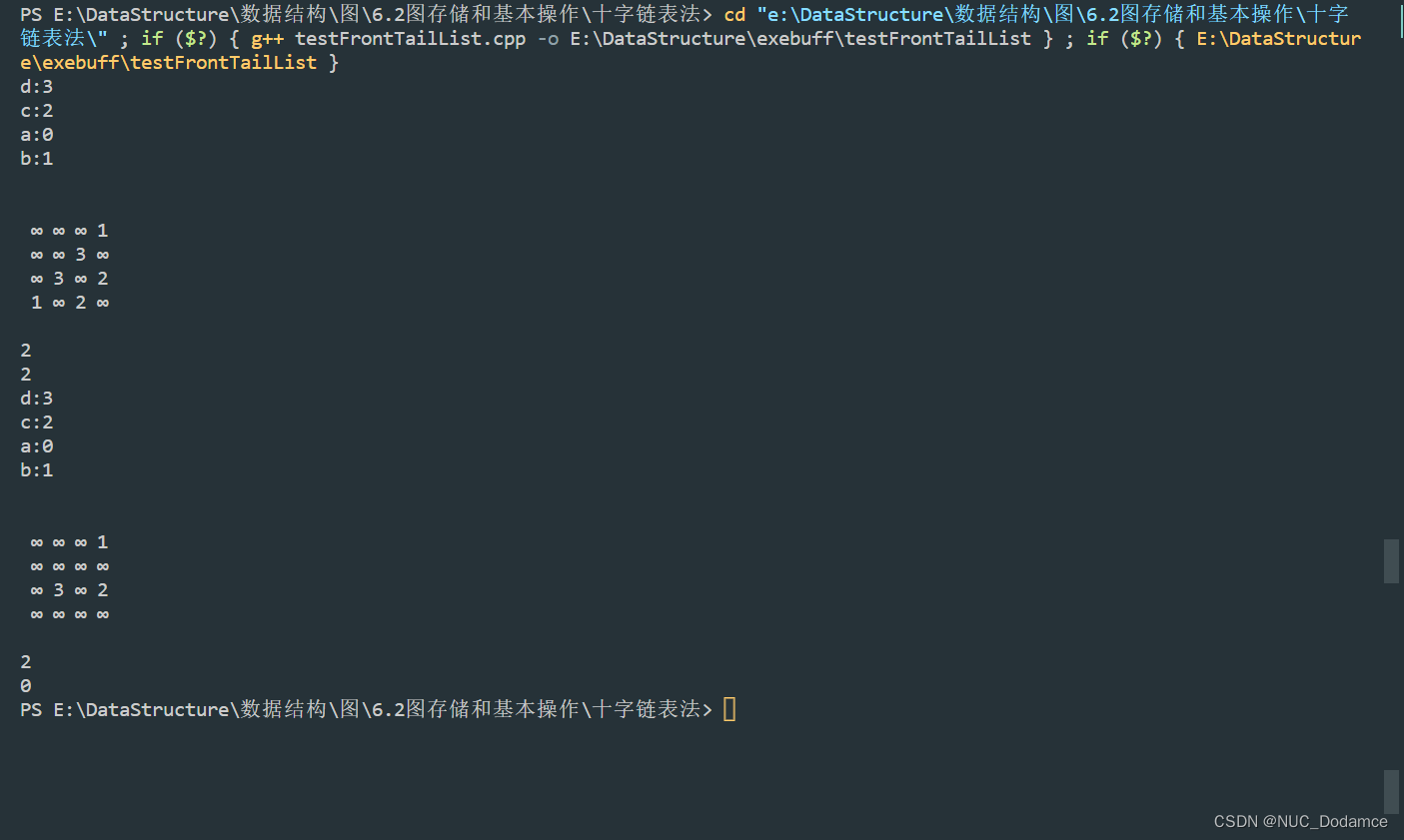
#include "FrontTailList.h"
using namespace std;
int main(int argc, char const *argv[])
{
FrontTailList graph({'a', 'b', 'c', 'd'}, false);
graph.AddEdge('a', 'd', 1);
graph.AddEdge('c', 'd', 2);
graph.AddEdge('c', 'b', 3);
graph.PrintGraph();
cout << graph.InDegree('d') << endl;
cout << graph.OutDegree('d') << endl;
FrontTailList graph2({'a', 'b', 'c', 'd'}, true);
graph2.AddEdge('a', 'd', 1);
graph2.AddEdge('c', 'd', 2);
graph2.AddEdge('c', 'b', 3);
graph2.PrintGraph();
cout << graph2.InDegree('d') << endl;
cout << graph2.OutDegree('d') << endl;
return 0;
}
![[附源码]Python计算机毕业设计Django健康医疗体检](https://img-blog.csdnimg.cn/730df7095d5c45cda0352f397b4f01ca.png)
![[附源码]计算机毕业设计JAVA校园闲置物品交易](https://img-blog.csdnimg.cn/bf23b357e8994acdb640b50e36f34587.png)






![[附源码]计算机毕业设计招聘系统Springboot程序](https://img-blog.csdnimg.cn/527c110b92624a2daeda7037e7a437c9.png)

![[附源码]Python计算机毕业设计SSM抗新冠肺炎药品进销存管理系统(程序+LW)](https://img-blog.csdnimg.cn/11900315a1194edca5b692c5ef1a5c8e.png)
![[附源码]计算机毕业设计疫情防控管理系统Springboot程序](https://img-blog.csdnimg.cn/7bfc0d1166be449b9cb2a1987a602be4.png)


![[附源码]Python计算机毕业设计Django基于Web的绿色环保网站](https://img-blog.csdnimg.cn/cdb731f6bee344afab0cc51c70981a36.png)