1)实验平台:正点原子stm32f103战舰开发板V4
2)平台购买地址:https://detail.tmall.com/item.htm?id=609294757420
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/thread-340252-1-1.html
第十四章 蜂鸣器实验
上一章,我们介绍了STM32F1的IO口作为输出的使用。本章,我们将通过另外一个例子继续讲述STM32F1的IO口作为输出的使用,不同的是本章讲的不是用IO口直接驱动器件,而是通过三极管间接驱动。我们将利用一个IO口来控制板载的有源蜂鸣器。
本章分为如下几个小节:
14.1 蜂鸣器简介
14.2 硬件设计
14.3 程序设计
14.4 下载验证
14.1 蜂鸣器简介
蜂鸣器是一种一体化结构的电子讯响器,采用直流电压供电,广泛应用于计算机、打印机、复印机、报警器、电子玩具、汽车电子设备、电话机、定时器等电子产品中作发声器件。蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。
STM32F103战舰开发板板载的蜂鸣器是电磁式的有源蜂鸣器,如图14.1.1所示:

图14.1.1 有源蜂鸣器
这里的有源不是指电源的“源”,而是指有没有自带震荡电路,有源蜂鸣器自带了震荡电路,一通电就会发声;无源蜂鸣器则没有自带震荡电路,必须外部提供2~5Khz左右的方波驱动,才能发声。
上一章,我们利用STM32的IO口直接驱动LED灯,本章的蜂鸣器,我们能否直接用STM32的IO口驱动呢?让我们来分析一下:STM32F1的单个IO最大可以提供25mA电流(来自数据手册),而蜂鸣器的驱动电流是30mA左右,两者十分相近,但是全盘考虑,STM32F1整个芯片的电流,最大也就150mA,如果用IO口直接驱动蜂鸣器,其他地方用电就得省着点了,所以我们不用STM32F1的IO直接驱动蜂鸣器,而是通过三极管扩流后再驱动蜂鸣器,这样STM32F1的IO只需要提供不到1mA的电流就足够了。
IO口使用虽然简单,但是和外部电路的匹配设计,还是要十分讲究的,考虑越多,设计就越可靠,可能出现的问题也就越少。
14.2 硬件设计
- 例程功能
蜂鸣器每隔300ms响或者停一次。LED0每隔300ms亮或者灭一次。LED0亮的时候蜂鸣器不叫,而LED0熄灭的时候,蜂鸣器叫。 - 硬件资源
1)LED灯
LED – PB5
2)蜂鸣器
BEEP - PB8 - 原理图
蜂鸣器在硬件上是直接连接好了的,不需要经过任何设置,直接编写代码就可以了。蜂鸣器的驱动信号连接在STM32F1的PB8上。如图14.2.1所示:
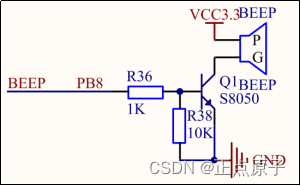
图14.2.1 蜂鸣器与STM32F1连接原理图
我们用一个NPN三极管(S8050)来驱动蜂鸣器,驱动信号通过R36和R38间的电压获得,芯片上电时默认电平为低电平,故上电时蜂鸣器不会直接响起。当PB8输出高电平的时候,蜂鸣器将发声,当PB8输出低电平的时候,蜂鸣器停止发声。
14.3 程序设计
本实验我们只是用到GPIO外设输出功能,关于HAL库的GPIO的API函数请看跑马灯实验的介绍。下面我们直接分析本实验的程序流程图。
14.3.1 程序流程图
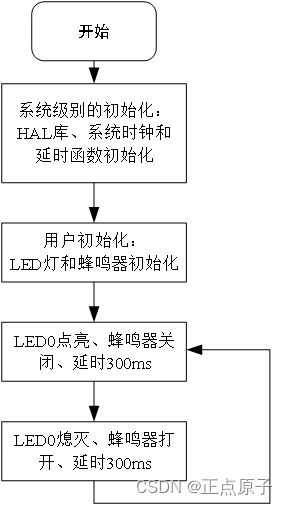
图14.3.1.1 蜂鸣器实验程序流程图
14.3.2 程序解析
- 蜂鸣器驱动代码
这里我们只讲解核心代码,详细的源码请大家参考光盘本实验对应源码。蜂鸣器(BEEP)驱动源码包括两个文件:beep.c和beep.h。
下面我们先解析beep.h的程序,我们把它分两部分功能进行讲解。
蜂鸣器引脚定义
由硬件设计小节,我们知道驱动蜂鸣器的三极管在硬件上连接到PB8,类似跑马灯实验,我们做了下面的引脚定义。
/* 引脚 定义 */
#define BEEP_GPIO_PORT GPIOB
#define BEEP_GPIO_PIN GPIO_PIN_8
/* PB口时钟使能 */
#define BEEP_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0)
蜂鸣器操作函数定义
为了后续对蜂鸣器进行便捷的操作,我们为蜂鸣器操作函数做了下面的定义。
/* 蜂鸣器控制 */
#define BEEP(x) do{ x ? \
HAL_GPIO_WritePin(BEEP_GPIO_PORT,BEEP_GPIO_PIN,GPIO_PIN_SET):\
HAL_GPIO_WritePin(BEEP_GPIO_PORT, BEEP_GPIO_PIN,GPIO_PIN_RESET);\
}while(0)
/* BEEP状态翻转 */
#define BEEP_TOGGLE() do{HAL_GPIO_TogglePin(BEEP_GPIO_PORT,BEEP_GPIO_PIN);\
}while(0)
BEEP(x)这个宏定义就是控制蜂鸣器的打开和关闭的。例如:如果要打开蜂鸣器,那么调用宏定义BEEP(1)即可,如果要关闭蜂鸣器,调用宏定义BEEP(0)即可。
BEEP_TOGGLE()是控制蜂鸣器进行翻转的。这里也利用HAL_GPIO_TogglePin函数实现IO口输出电平取反操作。
下面我们再解析beep.c的程序,这里只有一个函数beep_init,这是蜂鸣器的初始化函数,其定义如下:
/**
* @brief 初始化BEEP相关IO口, 并使能时钟
* @param 无
* @retval 无
*/
void beep_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
BEEP_GPIO_CLK_ENABLE(); /* BEEP时钟使能 */
gpio_init_struct.Pin = BEEP_GPIO_PIN; /* 蜂鸣器引脚 */
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(BEEP_GPIO_PORT, &gpio_init_struct); /* 初始化蜂鸣器引脚 */
BEEP(0); /* 关闭蜂鸣器 */
}
对蜂鸣器的控制引脚模式设置为高速上拉的推挽输出。最后关闭关闭蜂鸣器,防止没有操作就响了。
2. main.c代码
在main.c里面编写如下代码:
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/BEEP/beep.h"
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟,72M */
delay_init(72); /* 初始化延时函数 */
led_init(); /* 初始化LED */
beep_init(); /* 初始化蜂鸣器 */
while (1)
{
LED0(0);
BEEP(0);
delay_ms(300);
LED0(1);
BEEP(1);
delay_ms(300);
}
}
首先初始化 HAL库、系统时钟和延时函数。接下来,调用led_init来初始化灯,调用beep_init函数初始化蜂鸣器。最后在无限循环里面实现LED0和蜂鸣器间隔300ms交替闪烁和打开关闭一次。
14.4 下载验证
下载完之后,可以看到LED0亮的时候蜂鸣器不叫,而LED0熄灭的时候,蜂鸣器叫(因为他们的有效信号相反)。间隔为0.3秒左右,符合预期设计。
至此,本章的学习就结束了。通过本章,我们进一步学习IO作为输出的使用方法,同时巩固了前面知识的学习。希望大家在开发板上实际验证一下,从而加深印象。