文章目录
- 内存释放操作的总述
- thread cache
- central cache
- page cache
- central cache的TODO实现
- 何时维护这张映射表?
- tc_dealloc的修改
- 申请大内存的适配
- 写在最后
上篇文章梳理了内存申请操作的流程,大概测试了一下,没有发现什么问题。这篇文章将梳理内存释放操作的流程,若申请操作中,有些细节没有把控好,那么释放操作将bug不断。有些bug我至今还在调试…所以,这篇文章的梳理,侧重点依然是逻辑结构。代码的细节可能存在问题,并且解决这些问题的过程与心得,也能够单独梳理成一篇文章,好好总结一番了。
内存释放操作的总述
当某些条件满足时,thread cache将闲置的内存块归还给central cache,central cache将span归还给page cache,page cache将小块的span合并成大块的span,从而减少外碎片的问题。内存释放的过程是内存块的不断整合,由少到多,由小到大,将零散的内存块重新整合成新的span。
(注意:一些参数大小固定,这里先展示出来)
static const size_t NFREELIST = 208;
static const size_t MAX_SIZE = 256 * 1024;
static const size_t PAGE_SHIFT = 12;
static const size_t NPAGES = 129;
thread cache
首先是thread cache的内存块归还,当FreeList的长度大于“该链表一次能申请的最大数量”时需要进行归还操作(当然,还可以添加更多的条件,使空闲内存块尽可能合理的归还),这些内存块被归还给central cache。
“该链表一次能申请的最大数量”由接口size_t SizeClass::_adapt_count(size_t block_bytes)获取。
可以注意到,我们无法很快的得知FreeList的长度。所以这里再为FreeList创建一个变量以保存其长度,并且修改相关push和pop接口,因为进行这些操作会改变链表的长度,以下给出FreeList到目前为止的实现:
class FreeList
{
private:
void* _head = nullptr;
size_t _fetch_count = 1;
size_t _length = 0;
public:
void _push_front(void* obj);
void* _pop_front();
bool _empty();
// 将start到finish之间的内存块,头插到链表中
void _range_push(void* start, void* finish, size_t count);
// 将链表头部往后count块内存块删除,以输出型参数的方式返回区间中的头尾两块内存块
void* _range_pop(size_t count);
// 关于_fetch_count与_length的操作
inline size_t _get_fetch_count() { return _fetch_count; }
inline void _add_fetch_count() { ++_fetch_count; }
inline size_t _get_length() { return _length; }
};
bool FreeList::_empty()
{
return _head == nullptr;
}
void FreeList::_push_front(void* obj)
{
if (obj)
{
next(obj) = _head;
_head = (void*)obj;
_length += 1;
}
}
void* FreeList::_pop_front()
{
if (_head != nullptr)
{
void* ret = _head;
_head = next(_head);
_length -= 1;
return ret;
}
return nullptr;
}
void FreeList::_range_push(void* start, void* finish, size_t count)
{
if (start && finish)
{
next(finish) = _head;
_head = start;
_length += count;
}
}
void* FreeList::_range_pop(size_t count)
{
void* start = _head;
void* finish = start;
for (size_t i = 0; i < count - 1; ++i)
{
finish = next(finish);
}
_head = next(finish);
next(finish) = nullptr;
_length -= count;
return start;
}
通过_get_length()接口获取单链表长度后,与_get_fetch_count()接口返回的值进行比较。如果链表长度大于等于一次能获取的最大内存块数量,说明当前链表中有很多闲置的内存块没有使用,此时可以将一些内存块还给central cache。
FreeLlist的归还逻辑:调用链表的_range_pop接口(该接口会将count个内存块从链表中删除,并返回区间中第一块内存块的起始地址),获取被删除内存块区间的起始块地址后,以start为参数调用central cache的接收接口。该接口会将所有内存块插入到对应span中,该接口将在后续实现。
(_range_pop只返回内存块区间中第一块内存块的地址,为什么不返回最后一块内存块的地址?由于区间的最后一块内存块的指针域指向空,所以判断指针域是否指向空就能得知内存块区间是否遍历结束。)
修改thread cache的_deallocate接口:
void ThreadCache::_deallocate(void* obj, size_t block_size)
{
if (obj && block_size <= MAX_SIZE)
{
size_t bucket_index = SizeClass::_get_index(block_size);
FreeList& aim_list = _free_lists[bucket_index];
aim_list._push_front(obj);
// 链表长度大于等于一次能获取的最大内存块数量,需要归还
if (aim_list._get_length() >= aim_list._get_fetch_count())
{
void* start = aim_list._range_pop(aim_list._get_fetch_count());
// TODO调用central的接收接口
}
}
}
central cache
接着是实现central cache的接收接口:除了内存块区间的起始块地址,thread cache还需要将FreeList所处的桶号告知central cache,因为thread cache和central cache的哈希映射规则相同,所以FreeList的桶号不需要做转化。
内存区间中的每一块内存块可能属于不同的span,central cache需要将其归还到正确的span中。而我们只知道内存块的地址,如何通过内存块地址得知其位于的span?所以这里要设计算法实现内存块与span之间的映射,这个算法之后再实现。假设已经得知内存块位于的span,central cache要将其插入到span的FreeList中,当span的所有内存块都被归还时,central cache就要将该span向上交付,还给page cache。
如何得知span的内存块都被归还?这里为span添加一个成员变量:_used_count,表示该span下,被使用的内存块数量。取走span的内存块,该变量的值将增加。收回span的内存块,该变量的值将减少。当_used_count的值为0,说明没有线程使用该span的内存块。此时将central cache要把该span归还给page cache。
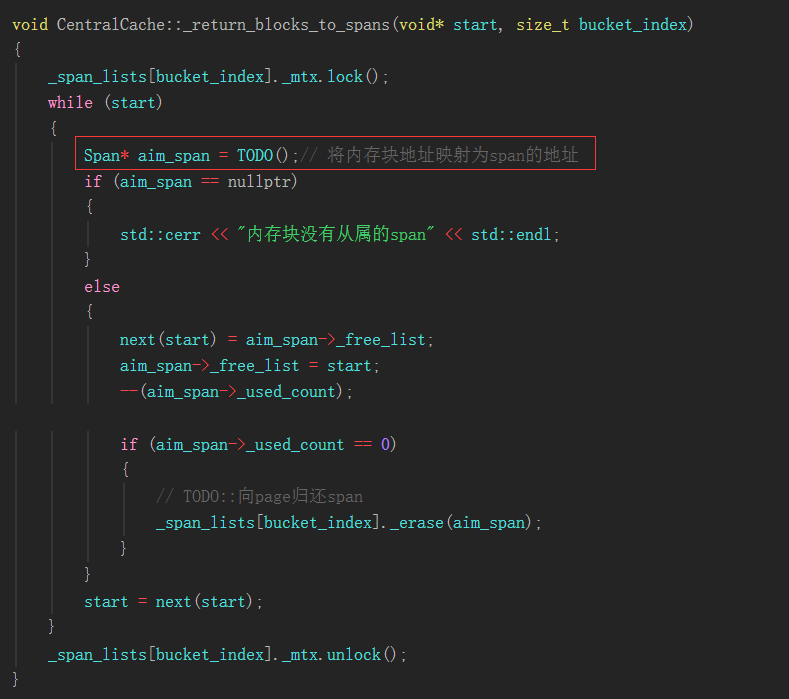
以下实现central cache的接收接口:
void CentralCache::_return_blocks_to_spans(void* start, size_t bucket_index)
{
_span_lists[bucket_index]._mtx.lock();
while (start)
{
Span* aim_span = TODO();// 将内存块地址映射为span的地址
if (aim_span == nullptr)
{
std::cerr << "内存块没有从属的span" << std::endl;
}
else
{
next(start) = aim_span->_free_list;
aim_span->_free_list = start;
--(aim_span->_used_count);
if (aim_span->_used_count == 0)
{
// TODO::向page归还span
_span_lists[bucket_index]._erase(aim_span);
}
}
start = next(start);
}
_span_lists[bucket_index]._mtx.unlock();
}
注意:高并发的场景下,线程需要加锁访问central cache。
page cache
接着实现TODO接口“page cache接收central cache归还的span”:这个接口需要接收一个span的地址,并尽可能地将该span和未使用的span进行合并,得到一个更大的span。如何合并出更大的span?这里要设计一个算法:查找与该span相邻的且未使用的span。
- 相邻的span:这个相邻指的是物理内存上的相邻,也就是页号的相邻,不是在SpanList链表中的逻辑位置相邻。我们可以通过span的页号推测与其相邻的页号,将这些页号转换成span的地址,进而判断这些span是否在使用
- 是否在使用:为Span添加一个bool类型的成员变量,true表示该span正在使用,false则相反
- 页号和地址的转换:Span结构存储了页号,因此我们可以通过span的地址获取该span的起始页号。即span*->页号,但是我们不能通过页号获取span的地址,即页号->span*。因此我们要维护页号到span*的映射关系,可以用映射表unordered_map保存映射关系,只要page cache申请了span,就要为这些span建立页号和地址的映射关系
因此,我们可以根据页号查找映射表,从而得知该页是否被申请(表中是否存在该key值),以及被申请了,但是否被central cache使用(key值存在,根据value值进行下一步判断)?
先添加映射表以及相关操作:
class PageCache
{
private:
PageCache() {}
PageCache(const PageCache& x) = delete;
public:
static PageCache* _get_instance() { return &_instance; }
// 获取一个跨越k页的span
Span* _fetch_kspan(size_t k);
// 接收来自central归还的span
void _return_span_to_spans(Span* span);
// 将k个页和span建立映射关系
void _insert_map(page_t page_id, size_t k, Span* span);
// 删除一对映射关系
void _erase_map(page_t page_id);
private:
static PageCache _instance;
SpanList _span_lists[NPAGES];
std::recursive_mutex _rmtx;;
std::unordered_map<page_t, Span*> _pageid_to_span;
};
// 这个操作大多是被其他函数调用,因为其他函数都加锁了,为防止死锁,这个函数不用加锁
void PageCache::_insert_map(page_t page_id, size_t k, Span* span)
{
if (span)
{
for (size_t i = 0; i < k; ++i)
{
_pageid_to_span[page_id + i] = span;
}
}
else
{
assert(false);
std::cerr << "PageCache::_insert_map::span不正确" << std::endl;
}
}
void PageCache::_erase_map(page_t page_id, size_t k)
{
for (size_t i = 0; i < k; ++i)
{
auto it = _pageid_to_span.find(page_id);
if (it != _pageid_to_span.end())
{
//std::cout << "删除了" << it->first << ",页数为:" << it->second->_n << std::endl;
_pageid_to_span.erase(page_id);
}
else
{
assert(false);
std::cerr << "PageCache::_erase_map::page_id不存在" << std::endl;
}
}
}
其中关于映射表的成员:
- _pageid_to_span就是所谓的映射表
- _map_span可以在映射表中为“从page_id往后的k个页”与“span”建立映射关系
- _erase_map可以在映射表中删除“从page_id往后的k个页”与“span”的映射关系
然后为Span添加成员变量_is_used,其初始值为flase,表示该span未被使用:
struct Span
{
Span* _prev = nullptr;
Span* _next = nullptr;
// 存储的内存页其实id与数量
page_t _id = 0;
size_t _n = 0;
// Span切好或合并后的单链表,以及分配出去的内存块数量
void* _free_list = nullptr;
size_t _used_count = 0;
// 是否被使用
bool _is_used = false;
};
接着实现page cache接收span的操作_return_span_to_spans:
- 先删除映射表中该span的所有映射关系
- 再判断是否能合并出更大的span
- 往前合并:判断该span的前一页是否被申请且未被使用,同时合并后的span大小不超过128页,若满足以上条件,合并两个span。然后继续往前合并
- 往后合并:同样的也是满足以上三个条件就可以进行后续的合并
- 最后将合并好的span插入到SpanLlist中
需要注意的是,每次的合并都要删除映射表中,被合并span的映射关系:
void PageCache::_return_span_to_spans(Span* span)
{
// 合并的过程需要加锁
std::unique_lock<std::recursive_mutex> guard(_rmtx);
if (span->_n > NPAGES - 1)
{
system_dealloc((void*)(span->_page_id << PAGE_SHIFT), span->_n << PAGE_SHIFT);
return;
}
// 先删除该span的所有映射关系
_erase_map(span->_page_id, span->_n);
// 往前合并
while (true)
{
page_t prev_page_id = span->_page_id - 1;
auto it = _pageid_to_span.find(prev_page_id);
if (it == _pageid_to_span.end()) break;
Span* prev_span = it->second;
if (prev_span->_is_used == true) break;
if (prev_span->_n + span->_n > 128) break;
span->_page_id = prev_span->_page_id;
span->_n += prev_span->_n;
// 删除被合并的span的映射关系
_erase_map(prev_span->_page_id, 1);
if (prev_span->_n != 1)
_erase_map(prev_span->_page_id + prev_span->_n - 1, 1);
// 删除SpanList中被合并的span
_span_lists[prev_span->_n]._erase(prev_span);
delete prev_span;
}
// 往后合并
while (true)
{
page_t next_page_id = span->_page_id + span->_n;
auto it = _pageid_to_span.find(next_page_id);
if (it == _pageid_to_span.end()) break;
Span* next_span = it->second;
if (next_span->_is_used == true) break;
if (next_span->_n + span->_n > 128) break;
span->_n += next_span->_n;
// 删除被合并的span的映射关系
_erase_map(next_span->_page_id, 1);
if (next_span->_n != 1)
_erase_map(next_span->_page_id + next_span->_n - 1, 1);
// 删除被合并的span
_span_lists[next_span->_n]._erase(next_span);
delete next_span;
}
span->_is_used = false;
_insert_map(span->_page_id, 1, span);
if (span->_n != 1)
_insert_map(span->_page_id + span->_n - 1, 1, span);
_span_lists[span->_n]._push_front(span);
}
central cache的TODO实现
回到central cache的接收接口_return_blocks_to_spans:
其中有一个TODO没有实现,该接口需要将内存块地址转换成span的地址。有了映射表,这个接口就可以实现了:
// 根据obj判断该内存块所属的span
Span* PageCache::_map_obj_to_span(void* obj)
{
// 映射obj内存块时也需要加锁
std::unique_lock<std::recursive_mutex> guard(_rmtx);
page_t id = (page_t)obj >> PAGE_SHIFT;
auto it = _pageid_to_span.find(id);
if (it == _pageid_to_span.end())
{
return nullptr;
}
else
{
return it->second;
}
}
page cache通过系统调用获取内存,而系统调用获取的内存以页为单位。一般情况下,页的大小为4kB或8kB,这里以4kB为例。系统调用返回的内存地址中,低12位是全0(因为4kB是基本单位),剩余位则用来表示页号。无论该页切分的内存块大小是多少,我们都能通过“将内存块地址右移12位”获取其属于的页号。有了页号,就能通过映射表找到其对应span的地址。
何时维护这张映射表?
什么时候要为页号和span*建立映射关系?当page的哈希桶申请128页的span时,需要建立映射吗?答案是需要,只要page cache申请了内存块,就要建立映射关系。然而是否要维护所有页的映射关系,则需要根据情况决定:
- 当span在page cache中,未被使用central cache使用时,不需要维护所有页号与span*的映射关系,只要维护起始页和终止页与span*的映射关系即可。这两对映射关系将在合并span时被使用
- 当span从page cache分配出去时,需要建立所有页号与span*的映射关系。这是因为cenctral cache在接收thread cache归还的内存块时,需要将内存块地址转换成span的地址
- 如果某个span的跨越了大量的页,而映射表值只维护其起始页和终止页的映射关系,这将导致中间页的内存块无法找到其对应span
综上,未被分配的span只要将首尾页号与span建立映射关系,被分配出去的span需要将所有页号与span建立映射关系。
以下是_fetch_kspan接口的修改:
Span* PageCache::_fetch_kspan(size_t k)
{
// 获取PageCache的span时需要加锁
std::unique_lock<std::recursive_mutex> guard(_rmtx);
if (!_span_lists[k]._empty())
{
Span* ret_span = _span_lists[k]._pop_front();
_insert_map(ret_span->_page_id, k, ret_span);
return ret_span;
}
else
{
for (int i = k + 1; i < NPAGES; ++i)
{
// 往后找更大的span,进行切分
if (!_span_lists[i]._empty())
{
// 找到不为空的SpanList,获取第一个Span,该Span的大小为i个page
Span* old_span = _span_lists[i]._pop_front();
Span* ret_span = new Span;
ret_span->_n = k;
ret_span->_id = old_span->_id;
old_span->_n -= k;
old_span->_id += k;
_span_lists[old_span->_n]._push_front(old_span);
_insert_map(old_span->_page_id, 1, old_span);
_insert_map(ret_span->_page_id, k, ret_span);
ret_span->_is_used = true;
return ret_span;
}
}
// 没有更大的Span可以用,此时向堆区申请一块128page的空间
void* ptr = system_alloc(128);
Span* max_span = new Span;
max_span->_id = (page_t)ptr >> PAGE_SHIFT;
max_span->_n = 128;
_span_lists[128]._push_front(max_span);
// 128页的span映射关系的建立(首尾)
_insert_map(max_span->_page_id, 1, max_span);
_insert_map(max_span->_page_id + 127, 1, max_span);
return _fetch_kspan(k);
}
}
没有合适的span而进行切分更大的span时,由于切分方向是从前往后,所以对于被切分的span,只需要为其起始页添加映射关系即可。对于被分配出去的span,需要为其所有页添加映射关系。
tc_dealloc的修改
修改释放接口:使之不接收内存块大小,只接收内存块的起始地址。有了page cache的映射表,我们可以通过内存块地址获取其span地址。现在的问题是:我们需要知道该span切分的内存块大小是多少?只有知道内存块大小,我们才能找到thread cache中对应的桶,进而归还该内存块。所以我们需要为Span添加一个成员_block_size,表示该span切分的内存块大小:
struct Span
{
// .....
// 该span切分的内存块大小
size_t _block_size = 0;
};
每次切分span成内存块(也就是这个接口:CentralCache::_get_span)时,都要维护该变量的值。
以下是利用PageCache::_map_obj_to_span接口改造的tc_deallocate:
static void tc_deallocate(void* obj)
{
if (pTLSThreadCache)
{
Span* span = PageCache::_get_instance()->_map_obj_to_span(obj);
size_t block_size = span->_block_size;
pTLSThreadCache->_deallocate(obj, block_size);
}
}
申请大内存的适配
由于thread cache的哈希桶中,最大的内存块大小为256kB。当线程申请的内存大于256kB时,需要重新设计内存申请和释放的过程,以满足此类需求。
而问题的本质在于:是否要贯穿我们设计的三层结构申请内存?一般情况下,申请小于等于256kB的内存块将贯穿三层结构。但我们设计的page cache的哈希桶能存储128页的span,当页的基本单位为4kB时,256kB也只使用了哈希桶的前64页,还有一半的哈希桶没有被使用。当然了,因为哈希桶的结构限制,大于256kB的内存申请不能贯穿central cache和thread cache,只能经过page cache层。我们知道page cache的合并span同样也是可以减少内存碎片的,所以我们应该尽可能的利用page cache,将大于256kB但小于等于128页的内存申请操作贯穿page cache层。至于大于128页的内存申请操作,这里直接调用系统接口即可,不使用page cache的哈希桶,只使用其映射表以完成内存的归还操作。
总结下,针对内存块大小,我们可以分成三种情况:
- 小于等于256kB的内存块,申请操作将贯穿三层结构
- 大于256kB但小于等于128页的内存块,申请操作只涉及page cahe,不涉及其他两层结构
- 大于128页的内存块,直接调用系统接口
因此,我们需要对tc_allocate和tc_deallocate进行再设计:
static void* tc_allocate(size_t need_bytes)
{
if (pTLSThreadCache == nullptr)
pTLSThreadCache = new ThreadCache;
void* obj = nullptr;
if (need_bytes > MAX_SIZE)
{
size_t block_size = SizeClass::_round_up(need_bytes);
Span* span = PageCache::_get_instance()->_fetch_kspan(block_size >> PAGE_SHIFT);
obj = (void*)(span->_page_id << PAGE_SHIFT);
}
else
{
obj = pTLSThreadCache->_allocate(need_bytes);
}
return obj;
}
static void tc_deallocate(void* obj)
{
if (pTLSThreadCache)
{
Span* span = PageCache::_get_instance()->_map_obj_to_span(obj);
size_t block_size = span->_block_size;
if (block_size > MAX_SIZE)
PageCache::_get_instance()->_return_span_to_spans(span);
else
pTLSThreadCache->_deallocate(obj, block_size);
}
}
接着是page cache的两个接口的修改。
关于page cache的_fetch_kspan接口:
- 当申请的span页数超过128页时,直接调用系统接口,获取内存后向映射表添加映射关系(只添加起始页和span*的映射关系),最后返回
- 当申请的span大小超过256kB时,操作需要贯穿page cache的哈希桶,但是需要添加起始页、终止页和span*的映射关系,因为合并span时需要这两对映射关系
- 当申请的span大小小于等于256kB时,操作需要贯穿page cache的哈希桶,并添加所有页和span的映射关系
// 系统调用的封装
// Common.hpp
inline static void* system_alloc(size_t kpage)
{
#ifdef _WIN32
void* p = VirtualAlloc(0, kpage << PAGE_SHIFT, MEM_COMMIT | MEM_RESERVE, PAGE_READWRITE);
#else
// 其他系统申请内存的函数
#endif
if (p == nullptr)
throw std::bad_alloc();
return p;
}
inline static void system_dealloc(void* ptr, size_t total_size)
{
#ifdef _WIN32
VirtualFree(ptr, total_size, MEM_DECOMMIT);
#else
// 其他系统
#endif
}
Span* PageCache::_fetch_kspan(size_t k)
{
// 获取PageCache的span时需要加锁
std::unique_lock<std::recursive_mutex> guard(_rmtx);
// 申请大于的span大于128页
if (k > NPAGES - 1)
{
void* obj = system_alloc(k);
Span* ret_span = new Span;
ret_span->_page_id = (page_t)obj >> PAGE_SHIFT;
ret_span->_block_size = k << PAGE_SHIFT;
ret_span->_is_used = true;
ret_span->_n = k;
// 添加起始页的映射关系
_insert_map(ret_span->_page_id, 1, ret_span);
return ret_span;
}
if (!_span_lists[k]._empty())
{
Span* ret_span = _span_lists[k]._pop_front();
// 注意区分不同的页
if (k > (MAX_SIZE >> PAGE_SHIFT))
{
_insert_map(ret_span->_page_id, 1, ret_span);
_insert_map(ret_span->_page_id + ret_span->_n - 1, 1, ret_span);
}
else
_insert_map(ret_span->_page_id, k, ret_span);
ret_span->_is_used = true;
return ret_span;
}
// ...
}
关于_return_span_to_spans接口:
- 当归还的内存块页数大于128页,调用系统接口,直接将其返回给系统
- 当归还的内存块页数小于等于128页,需要进行合并操作
void PageCache::_return_span_to_spans(Span* span)
{
// 合并的过程需要加锁
std::unique_lock<std::recursive_mutex> guard(_rmtx);
if (span->_n > NPAGES - 1)
{
system_dealloc((void*)(span->_page_id << PAGE_SHIFT), span->_n << PAGE_SHIFT);
return;
}
// ...
}
当时我在想:大于128页的内存申请直接在tc_alloc调用系统接口不就行了,这样脱离page cache不是更好吗?但是我忽略了一个重要的问题:tc_dealloc时,我只知道一个内存块的起始地址,怎么知道它的大小?小于等于128页的内存块可以通过page cache的映射表得知,而大于128页的内存块大小就不得而知了。所以这里还是需要记录内存块起始地址与内存块大小间的关系啊,因为已经实现了page cache的映射表,这里就不用再实现新的结构了。
写在最后
将代码转换成文字,并尽可能简洁准确地表述整体的样貌,解剖其中的关键。这使得我需要对文章进行不断的修改,然后再阅读,再修改,直到句子通顺,流畅。虽然这个过程枯燥乏味,但是它能帮助你理清思路与头绪。梳理完这两篇文章,对这个系统也有了更深刻的认识,现在我只希望能尽快找出其中的bug,让它尽量不出错,同时也要对其可读性和可维护性进行更多的考虑。
(文章日后还会修改,若有错别字请见谅)