这不最近新出了网络,YOLO-NAS,听过性能和速度都不错,而且int8量化后效果也不错。
一、吐槽
但是我打开该项目阅读readme.txt时候,发现这些示例网站一个都打不开!
而且readme.txt很不详细,你想训练自己的模型都无从下手。
二、ONXX格式导出
先安装super-gradients
pip install super-gradients 然后写个python文件,运行
from super_gradients.training import models
from super_gradients.common.object_names import Models
# Load model with pretrained weights
net = models.get(Models.YOLO_NAS_S, pretrained_weights='coco')
# net.predict("/home/jason/work/01-img/dog.png").show()
models.convert_to_onnx(model=net, input_shape=(3, 640, 640), out_path='yolo-nas-s.onnx')
用netron 查看下输出:
需要注意以下两点,通过官方工具导出的"bboxes"已经是"xyxy"格式了,所以不需要再执行make_grid, distance2bbox等操作了,直接进行"NMS"即可。但是,OpenCV的NMS要求输入的BBOXES格式为xywh,所以还需要再改一下
可以看到有两个输出
1135:float32[1,8400,4]。8400 是框子的数量,4是位置信息
1126:float32[1,8400,80]。 80是每个类别的概率。
三、onnx runtime C++部署
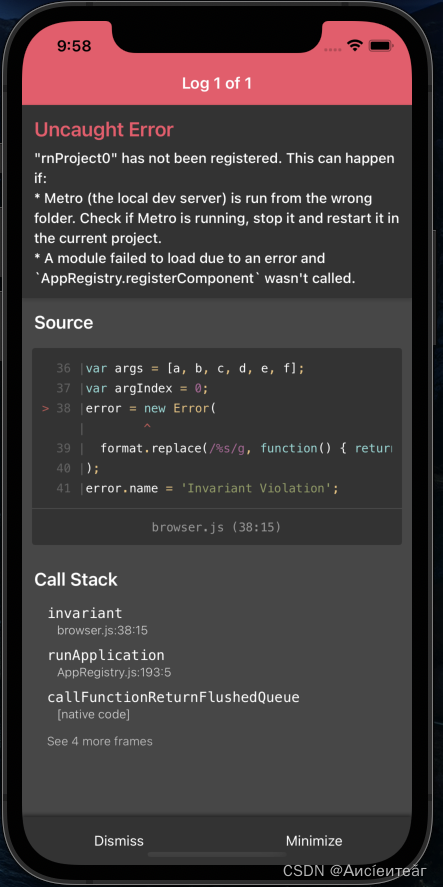
最大类别概率是178,索引是78,人就在摄像头面前。。。。位置信息也不对。。。
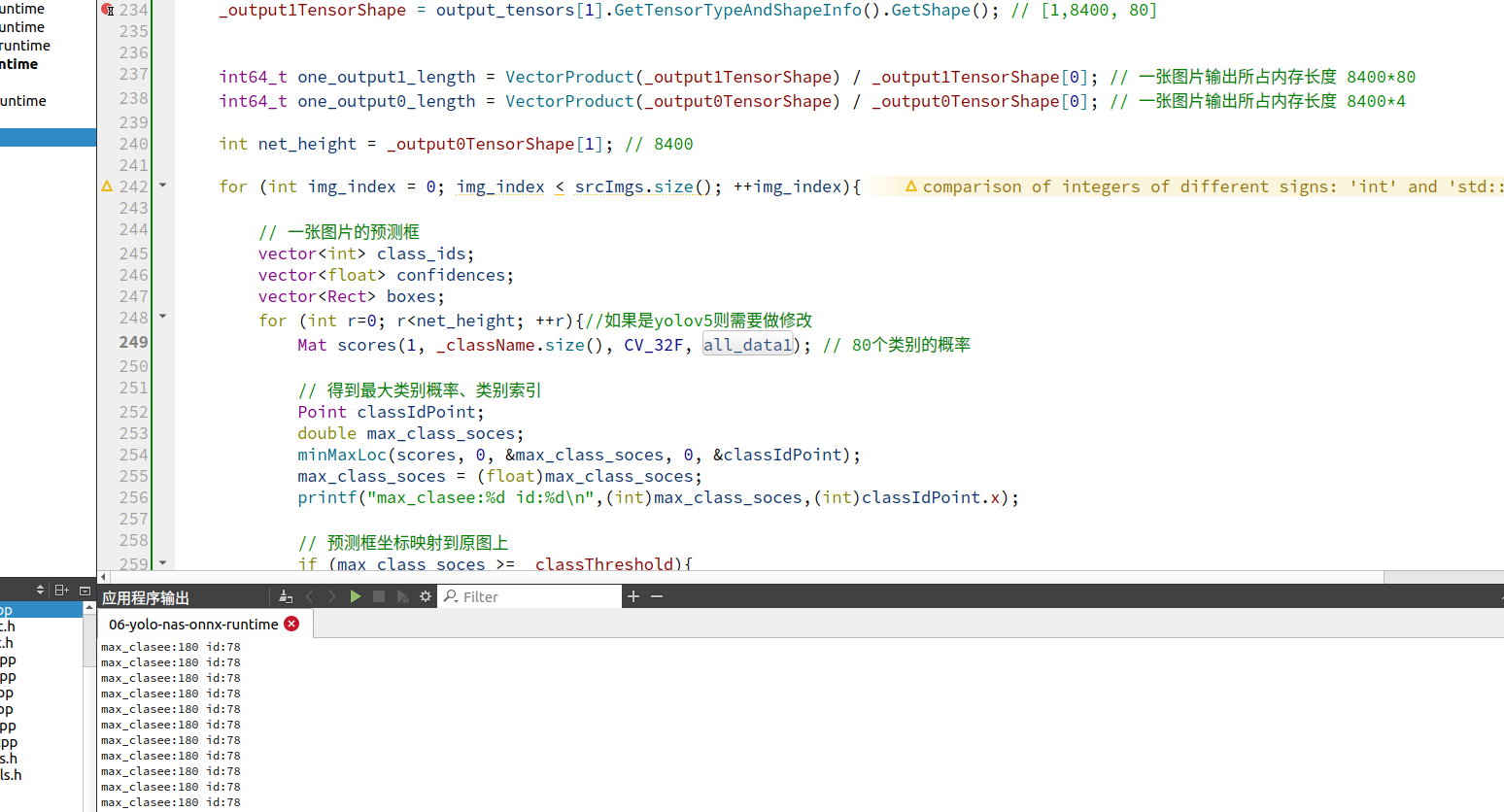
这是关于后处理的那个函数,有大佬试过这个网络的部署吗,望指点一二!
bool Yolov8Onnx::OnnxBatchDetect(std::vector<cv::Mat> &srcImgs, std::vector<std::vector<OutputDet> > &output)
{
vector<Vec4d> params;
vector<Mat> input_images;
cv::Size input_size(_netWidth, _netHeight);
//preprocessing (信封处理)
Preprocessing(srcImgs, input_images, params);
// [0~255] --> [0~1]; BGR2RGB
Mat blob = cv::dnn::blobFromImages(input_images, 1 / 255.0, input_size, Scalar(0,0,0), true, false);
// 前向传播得到推理结果
int64_t input_tensor_length = VectorProduct(_inputTensorShape);// ?
std::vector<Ort::Value> input_tensors;
std::vector<Ort::Value> output_tensors;
input_tensors.push_back(Ort::Value::CreateTensor<float>(_OrtMemoryInfo, (float*)blob.data,
input_tensor_length, _inputTensorShape.data(),
_inputTensorShape.size()));
output_tensors = _OrtSession->Run(Ort::RunOptions{ nullptr },
_inputNodeNames.data(),
input_tensors.data(),
_inputNodeNames.size(),
_outputNodeNames.data(),
_outputNodeNames.size()
);
//post-process
// int net_width = _className.size() + 4; // 不用加4
int net_width = _className.size();
float* all_data0 = output_tensors[0].GetTensorMutableData<float>(); // 位置信息
float* all_data1 = output_tensors[1].GetTensorMutableData<float>(); // 80类别概率
_output0TensorShape = output_tensors[0].GetTensorTypeAndShapeInfo().GetShape(); // [1, 8400, 4]
_output1TensorShape = output_tensors[1].GetTensorTypeAndShapeInfo().GetShape(); // [1,8400, 80]
int64_t one_output1_length = VectorProduct(_output1TensorShape) / _output1TensorShape[0]; // 一张图片输出所占内存长度 8400*80
int64_t one_output0_length = VectorProduct(_output0TensorShape) / _output0TensorShape[0]; // 一张图片输出所占内存长度 8400*4
int net_height = _output0TensorShape[1]; // 8400
for (int img_index = 0; img_index < srcImgs.size(); ++img_index){
// 一张图片的预测框
vector<int> class_ids;
vector<float> confidences;
vector<Rect> boxes;
for (int r=0; r<net_height; ++r){//如果是yolov5则需要做修改
Mat scores(1, _className.size(), CV_32F, all_data1); // 80个类别的概率
// 得到最大类别概率、类别索引
Point classIdPoint;
double max_class_soces;
minMaxLoc(scores, 0, &max_class_soces, 0, &classIdPoint);
max_class_soces = (float)max_class_soces;
printf("max_clasee:%d id:%d\n",(int)max_class_soces,(int)classIdPoint.x);
// 预测框坐标映射到原图上
if (max_class_soces >= _classThreshold){
// rect [x,y,w,h]
float x = all_data0[0];
float y = all_data0[1];
float w = all_data0[2] - x;
float h = all_data0[3] - y;
x = (x - params[img_index][2]) / params[img_index][0]; //x
y = (y - params[img_index][3]) / params[img_index][1]; //y
w = w / params[img_index][0]; //w
h = h / params[img_index][1]; //h
int left = MAX(int(x - 0.5 *w +0.5), 0);
int top = MAX(int(y - 0.5*h + 0.5), 0);
class_ids.push_back(classIdPoint.x);
confidences.push_back(max_class_soces);
boxes.push_back(Rect(left, top, int(w + 0.5), int(h + 0.5)));
}
}
all_data0 += one_output0_length; //指针指向下一个图片的地址
all_data1 += one_output1_length;
// 对一张图的预测框执行NMS处理
vector<int> nms_result;
cv::dnn::NMSBoxes(boxes, confidences, _classThreshold, _nmsThrehold, nms_result); // 还需要classThreshold?
// 对一张图片:依据NMS处理得到的索引,得到类别id、confidence、box,并置于结构体OutputDet的容器中
vector<OutputDet> temp_output;
for (size_t i=0; i<nms_result.size(); ++i){
int idx = nms_result[i];
OutputDet result;
result.id = class_ids[idx];
result.confidence = confidences[idx];
result.box = boxes[idx];
temp_output.push_back(result);
}
output.push_back(temp_output); // 多张图片的输出;添加一张图片的输出置于此容器中
}
if (output.size())
return true;
else
return false;
}参考:
YOLO-NAS_whaosoft143的博客-CSDN博客






![[笔记]初识Burpsuit](https://img-blog.csdnimg.cn/65663eae445a4635ba70dad540104f5a.png)