spi是串行全双工同步通信,支持多从机模式,没有应答机制,可靠性方面存在劣势;
采用边沿采样,根据时钟极性和时钟相位,有四种数据传输方式(由时钟变化(极性,相位)决定;
因为是全双工,数据收发可以同时进行
每次传输的位数为8位或16位为单位,传输单位数不受限制

如图,奇数边沿采样是在第一个时钟周期采样(读写数据
偶数边沿采样,是在第二个时钟周期采样
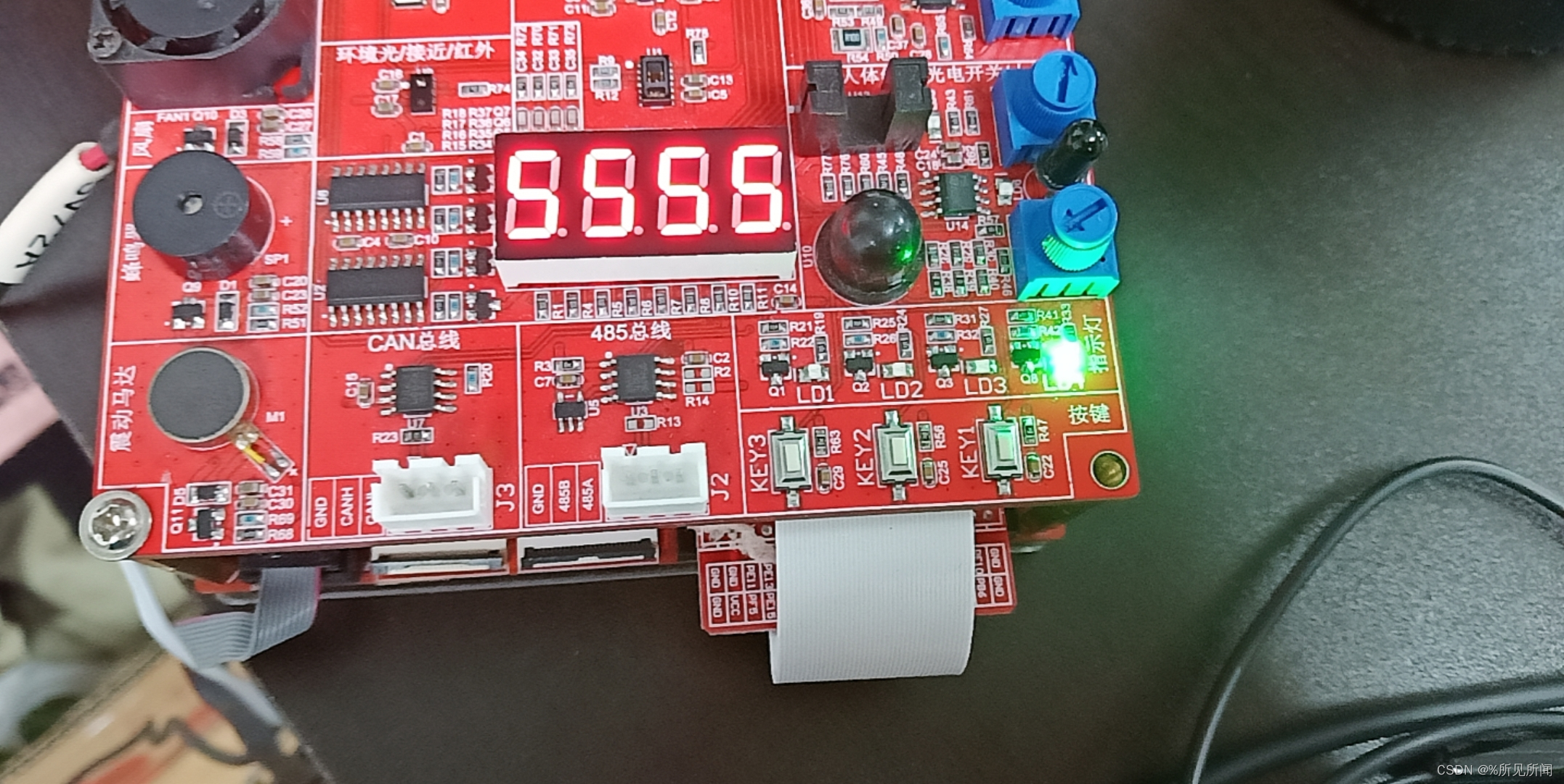
spi控制数码管的原理:
 主板线路连接了两个芯片,一个芯片用于控制数码管显示的数字,另一个用于控制哪个数码管显示。每个数码管有8位二进制表示(a,b,c,d....),4个数码管(G1,G2,G3,G4)用4位二进制数表示
主板线路连接了两个芯片,一个芯片用于控制数码管显示的数字,另一个用于控制哪个数码管显示。每个数码管有8位二进制表示(a,b,c,d....),4个数码管(G1,G2,G3,G4)用4位二进制数表示
驱动代码编写:
1.首先添加设备树
引用spi节点,写在根节点外;参考st的spi设备树,用grep "spi" * -nR 查找字符所在的文件
4根线,statu=okay;传输速率设置10k

编译,拷贝到开发板 ~/tftpboot
2.将spi配置进内核

3.驱动代码
#include <linux/init.h>
#include <linux/module.h>
#include <linux/spi/spi.h>
int m74hc595_probe(struct spi_device *spi)
{
char buf[]={0xf,0x6d};
//向spi总线设备写入
spi_write(spi,buf,sizeof(buf));
return 0;
}
int m74hc595_remove(struct spi_device *spi)
{
char buf[]={0xf,0};
spi_write(spi,buf,sizeof(buf)); //写0,关闭数码管显示
return 0;
}
struct of_device_id of_table[]={
{.compatible="hqyj,m74hc595"},
{},
};
//热插拔
MODULE_DEVICE_TABLE(of,of_table);
//定义spi对象并初始化
struct spi_driver m74hc595={
.probe=m74hc595_probe,
.remove=m74hc595_remove,
.driver={
.name="m74hc595",
.of_match_table=of_table,
},
};
module_spi_driver(m74hc595);
MODULE_LICENSE("GPL");4.现象

![[附源码]Python计算机毕业设计Django高校社团管理系统](https://img-blog.csdnimg.cn/fc2937fc5e52471ba6677b1649820598.png)





![[附源码]Python计算机毕业设计SSM考研信息共享博客系统(程序+LW)](https://img-blog.csdnimg.cn/2dd387923b83495bb288254cdc781b7c.png)