本文介绍在ArcMap软件中,实现栅格图像重采样的具体操作,以及不同重采样方法的选择依据。
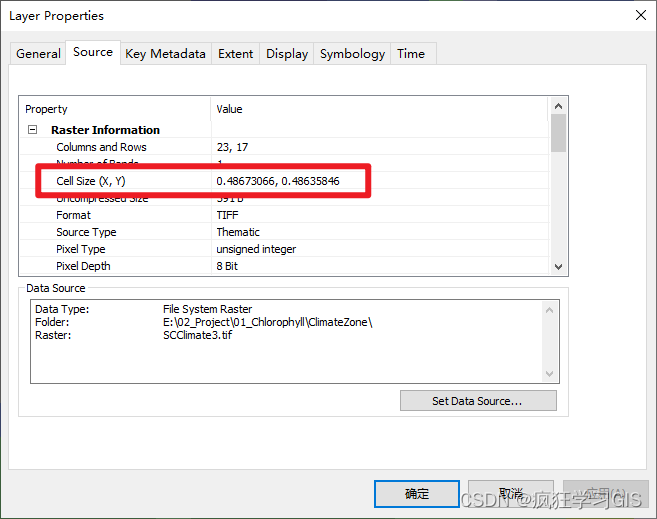
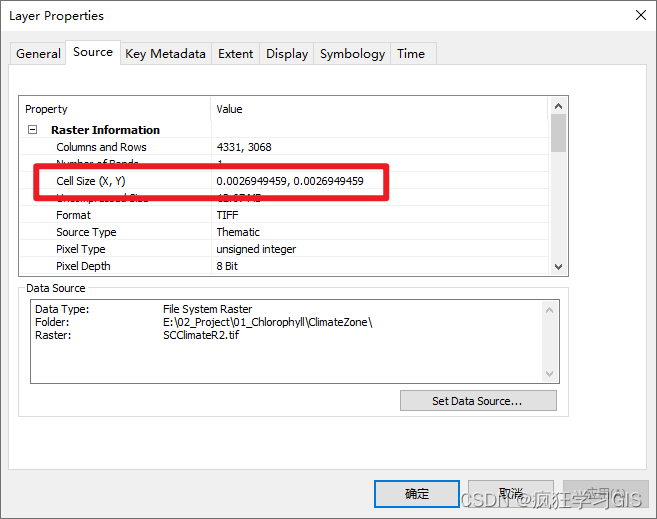
首先,如下图所示,是我们待重采样的栅格图像的属性界面。其中,可以看到此时栅格像元的边长为0.4867左右(由于图层是地理坐标系,所以单位就是度)。
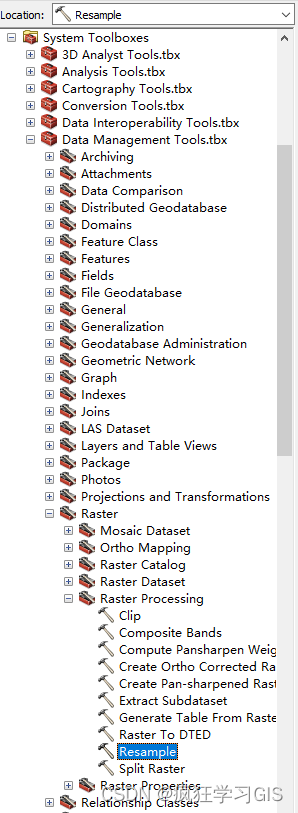
接下来,我们即可开始重采样操作。首先,在ArcMap软件中,依次选择“System Toolboxes”→“Data Management Tools.tbx”→“Raster”→“Raster Processing”→“Resample”选项;如下图所示。
随后,即可弹出“Resample”窗口。在窗口的第一个选项中,输入我们待重采样的栅格文件;在第二个选项中,配置输出结果的路径与文件名称;随后,第三个选项是设置重采样后栅格像元大小的参数,可以直接通过其下方X与Y的数值来指定像元大小,也可以通过其他栅格文件来指定;最后,第四个选项就是重采样所采用的方法。
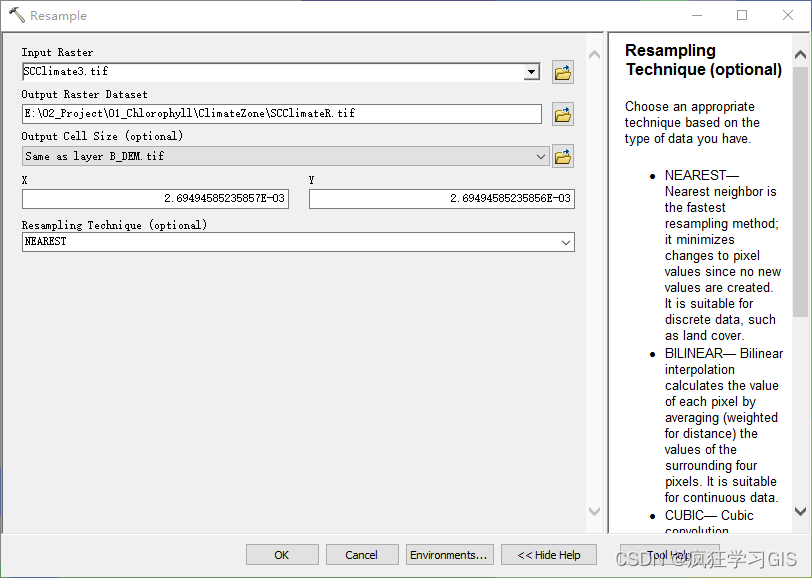
上述窗口中的参数整体也都很简单,也非常好理解;但主要是最后一个选项,也就是重采样方法的选择值得进一步探究。在实际应用过程中,我们究竟该选择哪一个方法呢?我们来看一下ArcGIS官网对不同方法的介绍;如下图所示。
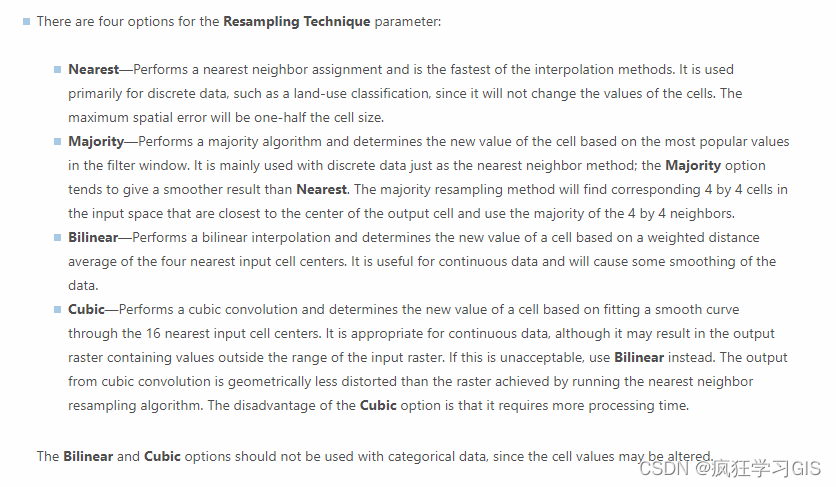
可以看到,ArcGIS官方一共提供了4种栅格数据重采样的方法,分别是最邻近分配法(NEAREST)、众数算法(MAJORITY)、双线性插值法(BILINEAR)与三次卷积插值法(CUBIC)。
首先,最邻近分配法是速度最快的插值方法。这一方法主要用于离散数据(如土地利用分类数据),因为这一方法不会更改像元的值。使用这一方法进行重采样,最大空间误差将是像元大小的一半。
其次,众数算法根据过滤器窗口中频率最高的数值来作为像元的新值。其与最邻近分配法一样,主要用于离散数据;但与最邻近分配法相比,众数算法通常可生成更平滑的结果。众数算法将在与输出像元中心最接近的输入空间中查找相应的4 x 4像元,并使用4 x 4相邻点的众数作为像元的新值。
再次,双线性插值法基于四个最邻近的输入像元中心的加权平均距离来确定像元的新值。这一方法对连续数据非常有用(且只能对连续数据使用),且会对数据进行一些平滑处理。
最后,三次卷积插值法通过拟合穿过16个最邻近输入像元中心的平滑曲线确定像元的新值。这一方法仅适用于连续数据,但要注意其所生成的输出栅格可能会包含输入栅格范围以外的值。如果大家不想出现这种情况,按照官方的说法,就需要转而使用双线性插值法。与通过运行最邻近分配法获得的栅格相比,三次卷积插值法的输出结果的几何变形程度较小。三次卷积插值法的缺点是需要更多的处理时间。
了解上述原理,我们就对选择哪一个方法有了比较清楚地认识。例如,我这里需要进行重采样操作的是一个类别数据,因此就只能选择最邻近分配法与众数算法;而后,我们可以结合实际需要进行两种方法的二选一即可(或者直接用两种方法运行一遍,看看哪一个方法对应的结果更符合自己的需要)。如果大家需要进行重采样操作的是连续数据,那么四种方法理论上都是可以的,但是后两种方法相对更适合一些;大家结合需要选择或者分别运行一次,找到最合适的结果即可。
重采样后,可以看到结果数据中像元的大小已经是我们需要的数值了。
至此,大功告成。
参考:参考文献链接