1.图像模糊
图像模糊是图像处理中最简单和常用的操作之一。
⚠️使用该操作的原因之一是为了给图像预处理时降低噪声。
图像模糊操作背后是数学的卷积计算。
卷积操作的原理:
常用的图像模糊的方法:
- 均值模糊
- 高斯模糊
- 中值模糊
- 双边模糊
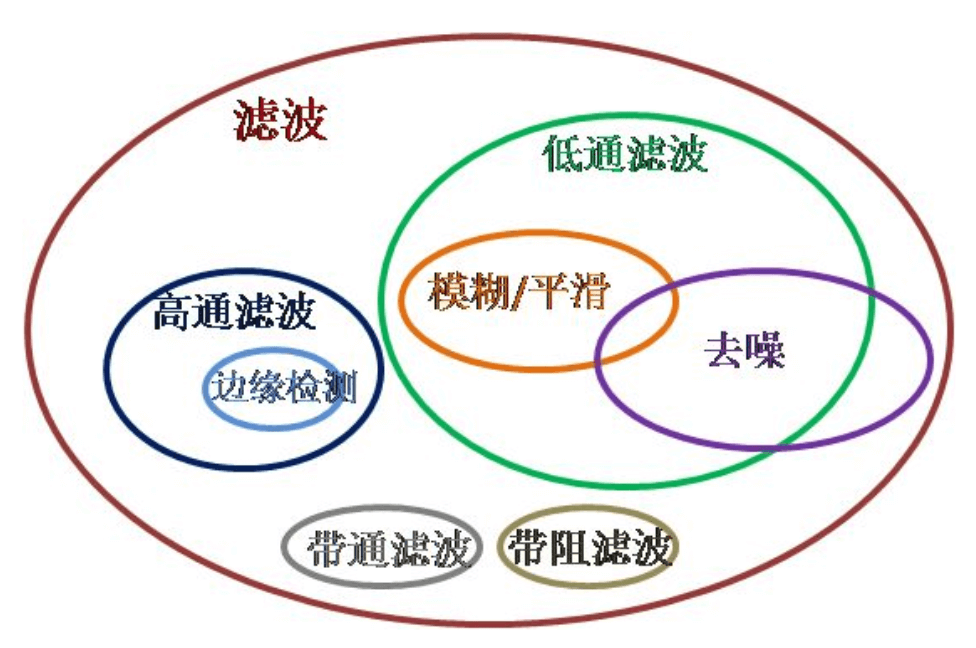
这四种模糊方式有时也被称为:均值滤波、高斯滤波、中值滤波和双边滤波。因为模糊属于一种滤波操作,具体关系可参照下图:
其中,均值滤波、高斯滤波和中值滤波属于线性滤波;而双边滤波属于非线性滤波。
接下来我们结合OpenCV中的相关API来进一步了解这些图像模糊的方法。
2.均值模糊
均值模糊的卷积核为:
kernel=1kernelwidth×kernelheight⎡⎣⎢⎢1⋮1⋯⋱⋯1⋮1⎤⎦⎥⎥
卷积核亦称掩膜。
OpenCV中的API:
| |
部分参数解释:
- 参数
Size ksize表示卷积核的大小。Size(3,3)表示3×3
的核大小;Size(5,5)表示5×5
- 的核大小。边长必须是正奇数。
- 参数
Point anchor表示锚点(anchor)的位置,即被平滑的那个点。默认值Point(-1,-1)表示锚点位于核的中心。
现在我们看下原图进行均值模糊之后的结果(左侧为原图,右侧为均值模糊后的图):
| |

3.高斯模糊
3.1.高斯模糊的原理
高斯模糊所用的卷积核就是基于二维高斯分布生成的。
二维高斯分布见本文第6部分。
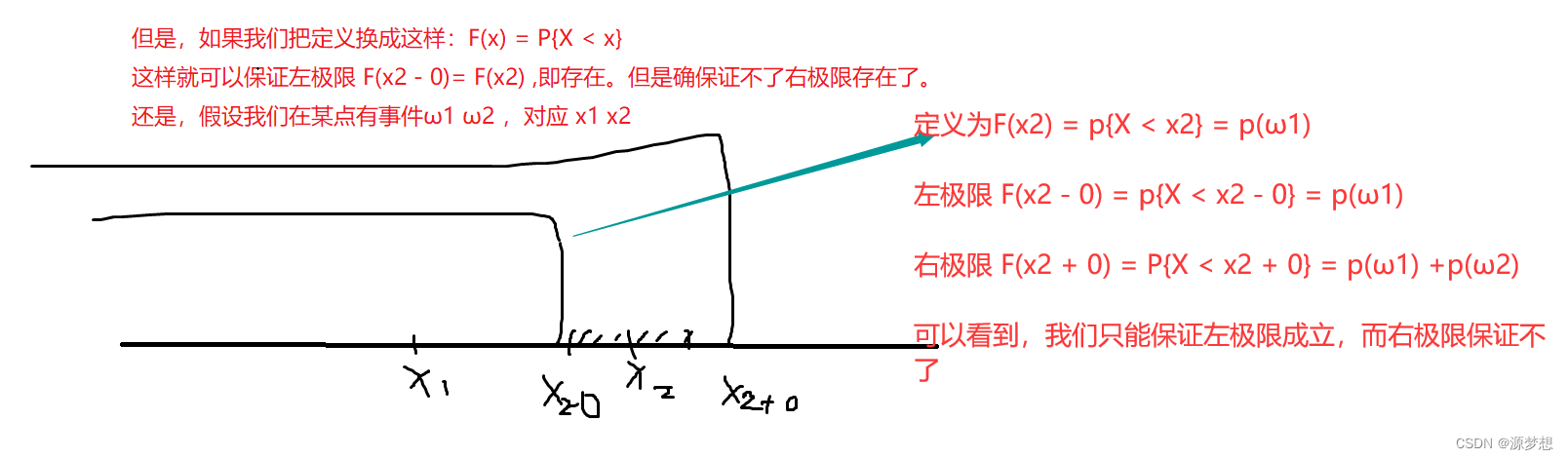
在高斯模糊中,二维高斯分布公式中的x1,x2
对应一个点的x,y坐标。因此可以假设x1,x2
是相互独立的,所以:
Cov(x1,x2)=Cov(x2,x1)=E(x1x2)−E(x1)E(x2)=E(x1)E(x2)−E(x1)E(x2)=0
并且:
Cov(x1,x1)=E(x21)−E2(x1)=σ21
同理:
Cov(x2,x2)=σ22
代入协方差矩阵∑
:
∑=[Cov(x1,x1)Cov(x2,x1)Cov(x1,x2)Cov(x2,x2)]=[σ2100σ22]
求其行列式:
∣∑∣=σ21σ22
则二维高斯分布公式可简化为:
f(x¯)=1(2π)(σ21σ22)1/2e−12[(x1−μ1σ1)2+(x2−μ2σ2)2]
假设我们要生成一个3×3
的高斯掩膜,锚点的坐标设置为(0,0),则周边点的坐标为:
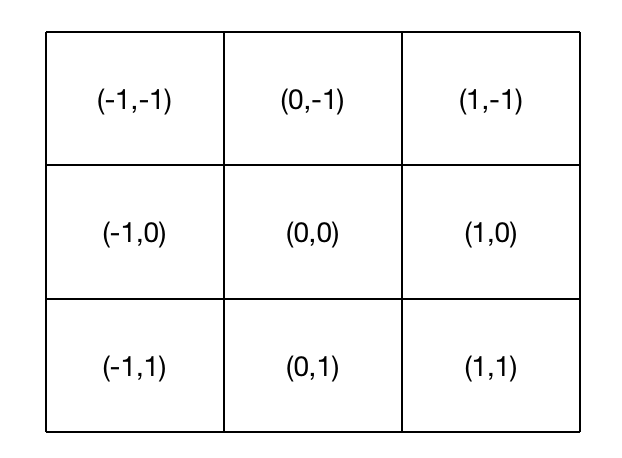
将(x1,x2)
对应的值代入上述公式中即可求得高斯掩膜。
为了方便,我们这里假设μ1=μ2=0,σ1=σ2=1
,又因为系数12π
为常数,因此可以省略,将二维高斯分布公式简化为:
e−12(x21+x22)
据此可得到:
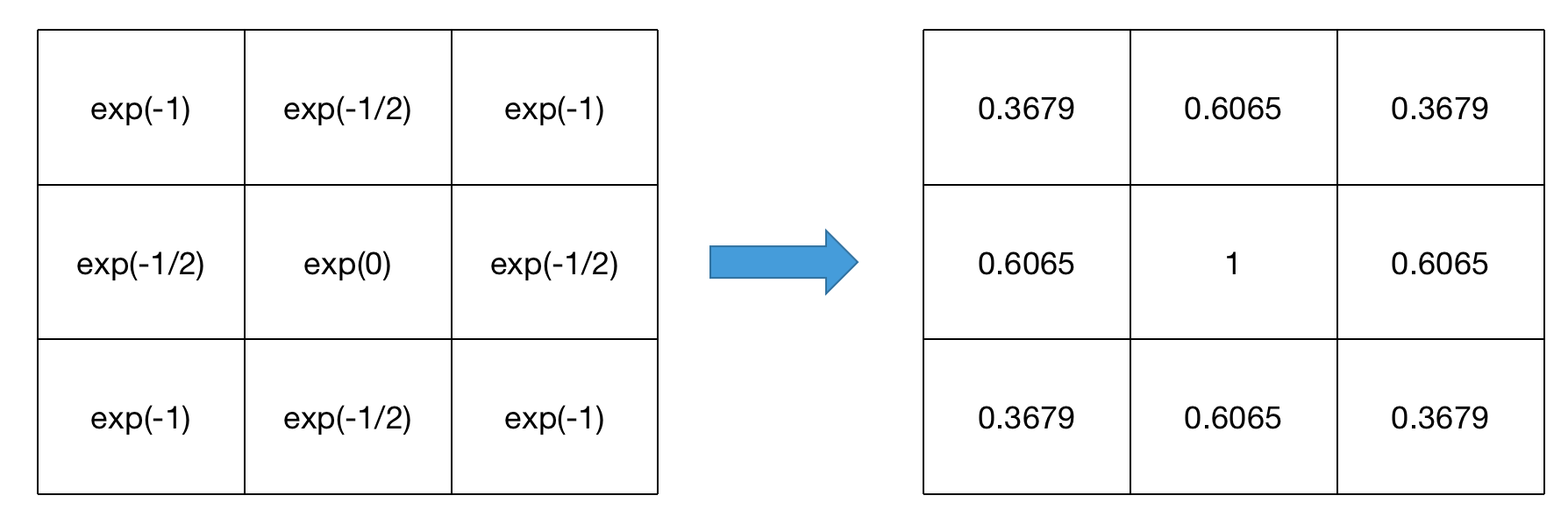
这9个点的权重总和不等于1,所以需要对其进行归一化处理:每个格子的数除以所有格子的数加起来的总和。这样即可得到一个3×3
的高斯掩膜:

3.2.高斯模糊的API
| |
其中,参数Size ksize表示卷积核的大小。sigmaX(高斯核在x方向的标准差)和sigmaY(高斯核在y方向的标准差)对应二维高斯分布公式中的σ1,σ2
。
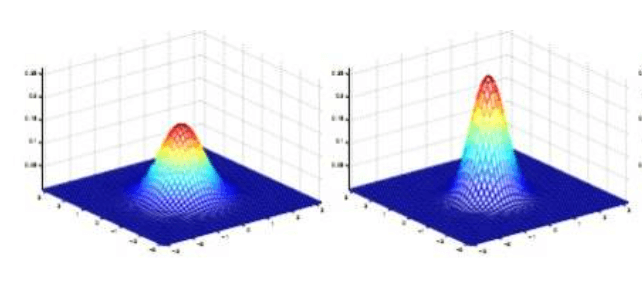
如果σ
较小(其二维高斯分布概率密度函数图像见下图右),那么生成的掩膜的中心系数较大,而周围的系数较小,这样对图像的模糊效果就不是很明显;反之,σ
较大(其二维高斯分布概率密度函数图像见下图左),则生成的模版的各个系数相差就不是很大,比较类似均值模糊,对图像的模糊效果比较明显。
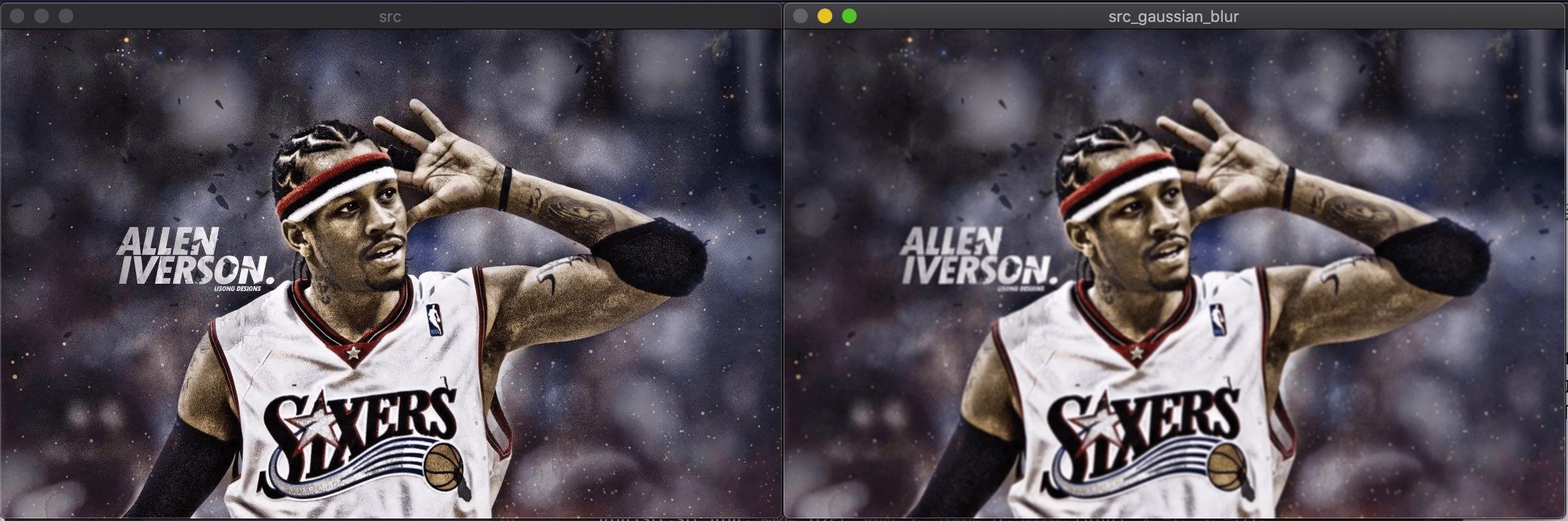
实际应用看下对比效果(左侧为原图,右侧为高斯模糊后的图):
| |
4.中值模糊
中值模糊即用中位数填补中心像素。
中值滤波的扩展:最小值滤波、最大值滤波。
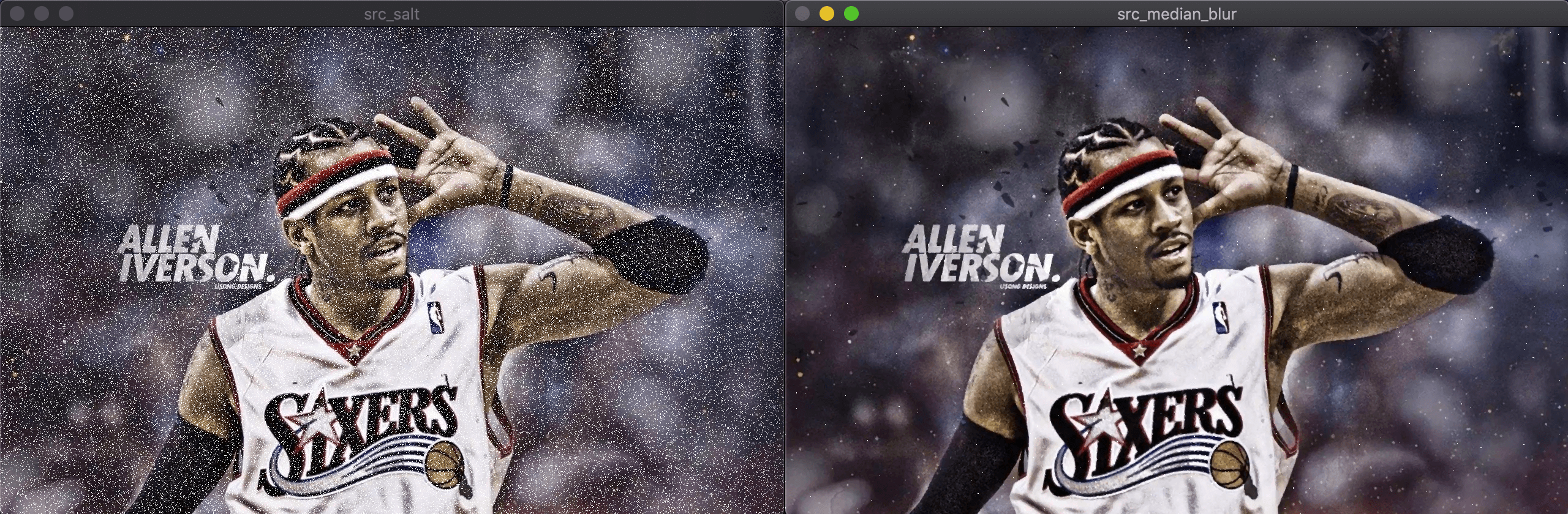
中值模糊对椒盐噪声有很好的抑制作用。
椒盐噪声:也称为脉冲噪声,是图像中经常见到的一种噪声,它是一种随机出现的白点或者黑点,也可能是亮的区域有黑色像素或是在暗的区域有白色像素(或者两者皆有)。
中值模糊的API:
| |
参数int ksize表示核的大小,必须大于1而且必须是奇数。
结果对比见下(左侧为加了椒盐噪声的原图,右侧为中值模糊后的图):
| |
5.双边模糊
均值模糊无法克服边缘像素信息丢失缺陷,原因是均值滤波是基于平均权重。
高斯模糊部分克服了该缺陷,但是无法避免,因为没有考虑像素值的不同。
高斯双边模糊是边缘保留的滤波方法,避免了边缘信息丢失,保留了图像轮廓不变(边缘指的是物体的边缘、轮廓)。
5.1.双边模糊的原理
⚠️双边滤波器综合了高斯滤波器和α
截尾均值滤波器的特点。高斯滤波器只考虑像素间的欧式距离,其使用的模版系数随着和窗口中心的距离增大而减小;α截尾均值滤波器则只考虑了像素灰度值之间的差值,去掉α
%的最小值和最大值后再计算均值。
‼️双边滤波器就等于空间距离与灰度距离的乘积。其使用二维高斯函数生成距离模版,使用一维高斯函数生成值域模版(以下公式都省去了前面的系数)。
👉距离模版系数的生成公式如下:
d(i,j,k,l)=exp(−(i−k)2+(j−l)22σ2d)
这个公式和3.1部分中的公式其实是一样的。只不过省去了系数,并且假定σ1=σ2=σd
。(k,l)为模版窗口的中心坐标,通常为(0,0),也就是(μ1,μ2)。(i,j)为模版窗口的其他系数的坐标,即(x1,x2)
。
👉值域模版系数的生成公式如下:
r(i,j,k,l)=exp(−∥f(i,j)−f(k,l)∥22σ2r)
其中,f(x,y)
表示图像在点(x,y)处的像素值;(k,l)为模版窗口的中心坐标;(i,j)为模版窗口的其他系数的坐标;σ2r
为高斯函数的方差。
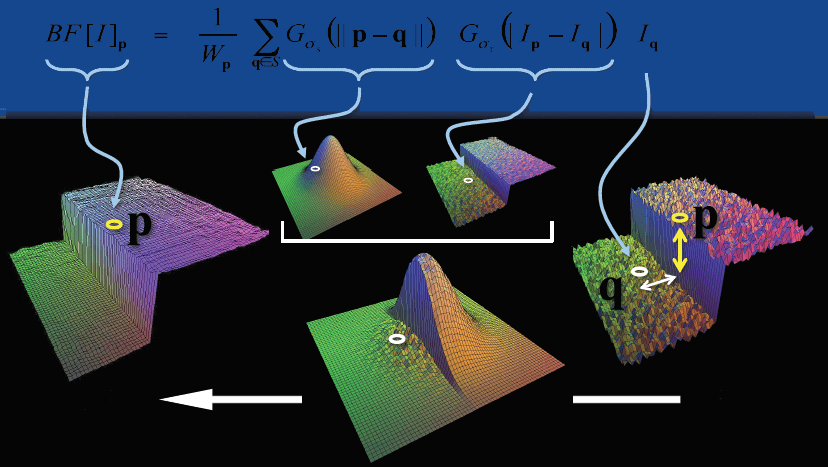
将上述两个模版相乘就得到了双边滤波器的模版:
w(i,j,k,l)=d(i,j,k,l)∗r(i,j,k,l)=exp(−(i−k)2+(j−l)22σ2d−∥f(i,j)−f(k,l)∥22σ2r)
双边滤波也可以用下图表示,对P点进行模糊,Q点的距离虽然很近,但是像素值差距过大,所以Q点的权重很小,不会过多的考虑到Q点的信息,所以说双边滤波考虑到了边缘信息,避免了边缘信息的丢失。
5.2.双边模糊的API
| |
部分参数解释:
int d是计算直径,范围内的像素都会被纳入计算。如果这个值我们设其为非正数,那么OpenCV会从第五个参数sigmaSpace来计算出它来。double sigmaColor即为公式中的σr
- 。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起。
double sigmaSpace即为公式中的σd
- 。数值越大,意味着越远的像素会相互影响。
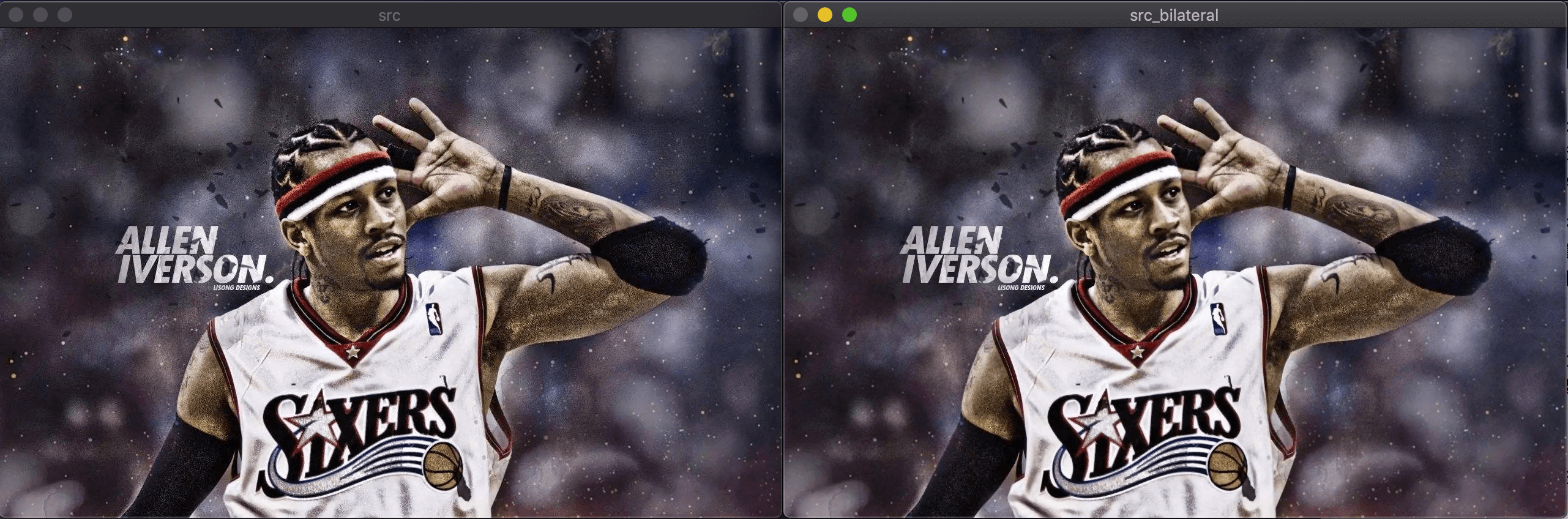
其效果见下(左侧为原图,右侧为双边模糊后的图):
| |
6.高斯分布
高斯分布(Gaussian distribution)又名正态分布。
👉一维高斯分布的概率密度函数为:
f(x)=12π−−√σe−(x−μ)22σ2
👉高维高斯分布的概率密度函数为:
f(x¯)=1(2π)D/21∣∑∣1/2e−12(x¯−μ¯)T∑−1(x¯−μ¯)
其中,x¯
表示维度为D的向量,μ¯则是这些向量的平均值,∑表示所有向量x¯的协方差矩阵,∣∑∣
表示协方差矩阵的行列式。
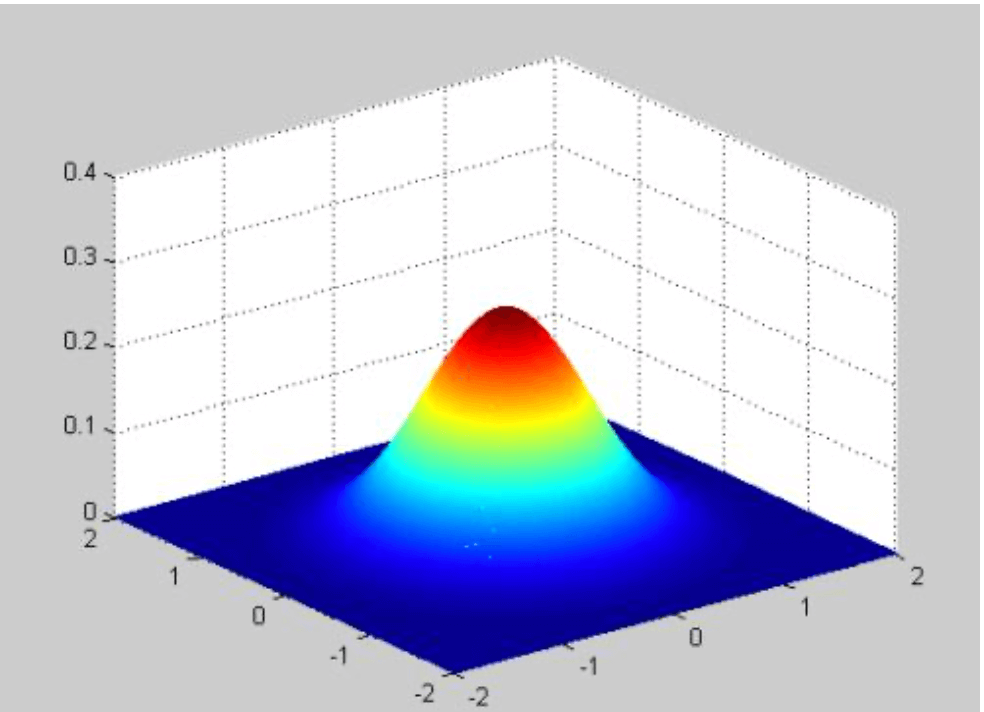
因此根据高维高斯分布的公式,我们可以得到二维高斯分布的概率密度函数为:
f(x¯)=1(2π)∣∑∣1/2e−12[(x1−μ1σ1)2+(x2−μ2σ2)2]
二维高斯分布的图像为: