1.关于边缘提取的算法有那些?各有什么优缺点?
-
Canny算法:Canny算法是一种经典的边缘检测算法,具有较高的准确性和良好的鲁棒性。该算法利用高斯滤波器对图像进行平滑处理,然后计算图像中每个像素的梯度和方向,并根据梯度幅值和方向进行非极大值抑制和双阈值处理,最后通过连接边缘像素生成边缘线。Canny算法的缺点是计算量较大,需要进行多次滤波和阈值处理,并且对噪声和图像分辨率较低的图像效果较差。
-
Sobel算法:Sobel算法是一种基于梯度运算的边缘检测算法,可以快速计算图像中每个像素点的梯度大小和方向,并据此生成边缘线。该算法采用Sobel算子对图像进行卷积运算,然后对梯度幅值进行阈值处理,得到二值化的边缘图像。Sobel算法的优点是计算速度较快,对噪声和图像分辨率较低的图像效果较好,但缺点是容易受到边缘方向的影响,可能会漏检和误检边缘。
-
Laplacian算法:Laplacian算法是一种基于二阶微分运算的边缘检测算法,可以检测出图像中的高频变化,即边缘。该算法对图像进行拉普拉斯变换,然后对结果进行阈值处理,得到二值化的边缘图像。Laplacian算法的优点是可以检测出较弱的边缘,但缺点是对噪声和图像分辨率较低的图像效果较差,容易产生假边缘。
-
LoG算法:LoG(Laplacian of Gaussian)算法是一种基于高斯滤波器和拉普拉斯变换的边缘检测算法,可以在不同尺度上检测出边缘。该算法先对图像进行多次高斯滤波,然后对结果进行拉普拉斯变换,得到边缘响应图像。LoG算法的优点是可以检测出不同尺度的边缘,但缺点是计算量较大,需要对图像进行多次滤波和卷积运算,容易受到噪声和尺度参数的影响。
2.用C++为下面数组写一个排序代码,从小到大排序
int a[10] = {2,8,3,4,6,9,7,1,5,1}
#include <iostream>
using namespace std;
//快排
void quickSort(int a[], int left, int right) {
if (left >= right) {
return;
}
int pivot = a[left]; // 选择第一个元素为枢轴,也可以选择其他元素
int i = left, j = right;
while (i < j) {
while (i < j && a[j] >= pivot) {
j--;
}
a[i] = a[j];
while (i < j && a[i] <= pivot) {
i++;
}
a[j] = a[i];
}
a[i] = pivot;
quickSort(a, left, i-1);
quickSort(a, i+1, right);
}
int main() {
int a[10] = {2,8,3,4,6,9,7,1,5,1};
int n = 10;
quickSort(a, 0, n-1);
cout << "排序后的数组为:";
for (int i = 0; i < n; i++) {
cout << a[i] << " ";
}
cout << endl;
return 0;
}
取一个枢轴(pivot)元素,将待排序数组分成两部分,一部分小于等于枢轴,另一部分大于枢轴。然后对这两部分分别递归地进行快速排序,最终得到排序后的数组。在实现中,选择第一个元素作为枢轴,使用双指针法进行快速排序。快速排序算法的时间复杂度为O(nlogn),是一种常用的排序算法。
3.如下数组中,求数组内小于2的最大连续区间,要求返回符合条件的区间位置和长度。
inta[10]={0,1,8,9,5,0,1,1,9,0}
#include <iostream>
#include <vector>
using namespace std;
struct Interval { // 存储区间的结构体
int start;
int end;
};
vector<Interval> findMaxSubarray(int a[], int n) {
vector<Interval> result;
int start = 0, end = 0;
int maxLength = 0;
bool inSubarray = false;
for (int i = 0; i < n; i++) {
if (a[i] < 2) { // 如果当前元素小于2
if (!inSubarray) { // 如果还没有在区间内
start = i;
inSubarray = true;
}
end = i;
} else { // 如果当前元素大于等于2
if (inSubarray) { // 如果已经在区间内
int length = end - start + 1;
if (length > maxLength) { // 更新最大连续区间
maxLength = length;
result.clear();
result.push_back({start, end});
} else if (length == maxLength) { // 如果有多个最大连续区间
result.push_back({start, end});
}
inSubarray = false;
}
}
}
if (inSubarray) { // 处理最后一个区间
int length = end - start + 1;
if (length > maxLength) {
maxLength = length;
result.clear();
result.push_back({start, end});
} else if (length == maxLength) {
result.push_back({start, end});
}
}
return result;
}
int main() {
int a[10] = {0,1,8,9,5,0,1,1,9,0};
int n = 10;
vector<Interval> result = findMaxSubarray(a, n);
if (result.empty()) {
cout << "不存在符合条件的区间" << endl;
} else {
cout << "符合条件的区间为:" << endl;
for (Interval interval : result) {
cout << "[" << interval.start << ", " << interval.end << "],长度为" << interval.end - interval.start + 1 << endl;
}
}
return 0;
}
该算法的基本思路是遍历数组,当遇到小于2的元素时,就认为进入了一个连续区间,记录区间的起始位置和结束位置;当遇到大于等于2的元素时,就认为当前区间结束,计算区间的长度,并与当前的最大连续区间进行比较,更新最大连续区间。最终返回符合条件的区间的位置和长度。该算法的时间复杂度为O(n),空间复杂度为O(1)。
4.描述下面函数主要功能。
传入参数(图像数据, 检测宽度, 直线方程x=a*y+c中a和c,方向控制变量+1或者-1,上边起始位置,下边结束位置,均值)
int funcXXX(BYTE *imagedata, int width, Coe cV, int is_edge, int y_up_cor, int y_dw_cor,
double &Charlocal )
{
BYTE*gryR=NULL
BYTE*gryG=NULL;
BYTE* gryB = NULL ;
int ptNum =0 ;
int y_cor=0;
int gry=0;
CharlocalAvg =0;
for (int i=y_up_cor ;i< y_dw_cor ;i++ )
{
int x_cor_start = c.a*i+cV.c ;
for (int j=10;j< width ; j++ )
{
x_cor=x_corstart + j*is edge ;
gryB= (imagedata +COLOR IMAGE CIMSTEP*i +COLOR IMAGE DEPTH*x cor );
gryG= gryB+1;
gryR= gryB+2;
gry=(*gryR*299+*gryG*587+*gryB*114+500)/1000
Charlocal += gry ;
ptNum ++
}
}
if (ptNum--0) return FALSE:
Charlocal /= ptNum ;
return TRUE ;
}
该函数的主要功能是在图像数据中检测给定直线方程x=a*y+c,并计算该直线区域内灰度值的平均值。该函数的具体参数和功能如下:
- imagedata:输入的图像数据,以字节方式存储,每个像素包含R、G、B三个分量。
- width:图像的宽度(以像素为单位)。
- cV:直线方程x=a*y+c中的系数a和常数c,以结构体形式传入。
- is_edge:方向控制变量,控制直线方程的正负方向,取值为+1或-1。
- y_up_cor:直线区域的上边起始位置,即y坐标的起始位置。
- y_dw_cor:直线区域的下边结束位置,即y坐标的结束位置。
- Charlocal:输出参数,表示直线区域内灰度值的平均值。
该函数首先通过直线方程计算出每个像素的x坐标,然后计算该像素的灰度值,并将灰度值累加到Charlocal变量中。最后计算直线区域内像素的数量ptNum,将Charlocal除以ptNum得到平均灰度值。如果ptNum为0,则返回FALSE,表示没有找到符合条件的像素;否则返回TRUE,表示计算成功。
5,利用C++写一个基于对话框的小软件.界面如下,完成加载图片在特定的区域显示,图像二值化,旋转图像缩放.等简单功能.
标题 测试程序
读取图片
二值化
图像缩放
图像旋转
空泡缺陷标识
确定
取消
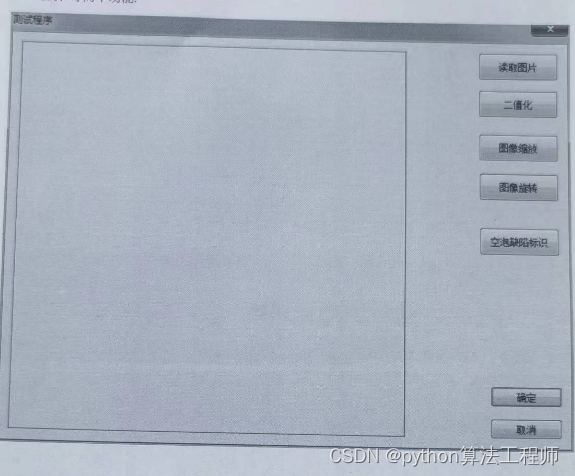
为了创建一个基于对话框的C++应用程序,可以使用Qt框架。Qt是一个跨平台的应用程序开发框架,适用于各种操作系统。以下是一个简单的示例,展示了如何使用Qt创建一个包含所需功能的应用程序。
-
首先,安装Qt和Qt Creator。您可以从这里下载和安装:https://www.qt.io/download
-
打开Qt Creator并创建一个新的Qt Widgets应用程序。
-
在Qt Creator中,打开
mainwindow.ui文件。使用设计器在主窗口上添加以下控件:
- QLabel用于显示图像
- QPushButton用于读取图片、二值化、图像缩放、图像旋转和空泡缺陷标识功能
- QDialogButtonBox用于确定和取消按钮
- 为每个按钮添加槽函数。在
mainwindow.h文件中添加以下代码:
private slots:
void on_loadImageBtn_clicked();
void on_binarizeBtn_clicked();
void on_scaleBtn_clicked();
void on_rotateBtn_clicked();
void on_defectBtn_clicked();
- 实现槽函数。在
mainwindow.cpp文件中添加以下代码:
#include <QFileDialog>
#include <QImage>
#include <QMessageBox>
#include <QGraphicsPixmapItem>
#include <QGraphicsScene>
// ...
void MainWindow::on_loadImageBtn_clicked() {
QString fileName = QFileDialog::getOpenFileName(this, tr("Open Image"), "", tr("Images (*.png *.xpm *.jpg *.bmp)"));
if (!fileName.isEmpty()) {
QImage image(fileName);
if (image.isNull()) {
QMessageBox::information(this, tr("Image Viewer"), tr("Cannot load %1.").arg(fileName));
return;
}
ui->imageLabel->setPixmap(QPixmap::fromImage(image));
}
}
void MainWindow::on_binarizeBtn_clicked() {
// Implement image binarization
}
void MainWindow::on_scaleBtn_clicked() {
// Implement image scaling
}
void MainWindow::on_rotateBtn_clicked() {
// Implement image rotation
}
void MainWindow::on_defectBtn_clicked() {
// Implement defect detection
}
-
实现图像处理功能。可以使用OpenCV库来实现二值化、缩放和旋转等功能。
要在Qt项目中使用OpenCV,可以按照以下步骤进行操作:-
下载和安装OpenCV库,可以从官网(https://opencv.org/)下载最新版本的OpenCV库,安装过程中需要设置好环境变量。
-
在Qt项目中包含OpenCV库,可以在.pro文件中添加以下代码:
INCLUDEPATH += path/to/opencv/include LIBS += -Lpath/to/opencv/lib -lopencv_core -lopencv_imgproc -lopencv_highgui其中,path/to/opencv是OpenCV库的安装路径,可以根据实际情况进行修改。
- 在Qt项目中使用OpenCV库,可以使用以下代码实现二值化、缩放和旋转等图像处理功能:
#include <opencv2/opencv.hpp> using namespace cv; // 二值化 void thresholdImage(Mat &image, int thresholdValue) { if (image.channels() == 3) { cvtColor(image, image, COLOR_BGR2GRAY); } threshold(image, image, thresholdValue, 255, THRESH_BINARY); } // 缩放 void resizeImage(Mat &image, double scale) { resize(image, image, Size(), scale, scale); } // 旋转 void rotateImage(Mat &image, double angle) { Point2f center(image.cols / 2.0, image.rows / 2.0); Mat rot = getRotationMatrix2D(center, angle, 1.0); warpAffine(image, image, rot, image.size()); }在上述代码中,使用了OpenCV库中的threshold()函数实现二值化,使用了resize()函数实现缩放,使用了getRotationMatrix2D()函数和warpAffine()函数实现旋转。
需要注意的是,在使用OpenCV库时,需要将Mat类型的图像转换为QImage类型的图像,才能在Qt界面中显示。可以使用以下代码实现Mat类型和QImage类型之间的转换:
-
QImage Mat2QImage(Mat &image)
{
QImage qimage(image.data, image.cols, image.rows, image.step, QImage::Format_RGB888);
return qimage.rgbSwapped();
}
Mat QImage2Mat(QImage &qimage)
{
Mat mat(qimage.height(), qimage.width(), CV_8UC4, (uchar*)qimage.bits(), qimage.bytesPerLine());
cvtColor(mat, mat, COLOR_RGBA2RGB);
return mat;
}
在上述代码中,使用了QImage::Format_RGB888格式来创建QImage类型的图像,使用了rgbSwapped()函数将BGR顺序转换为RGB顺序。在将QImage类型的图像转换为Mat类型的图像时,需要注意格式转换。