device_node转换成platform_device
文章目录
- device_node转换成platform_device
- 转换规则
- 主要核心函数
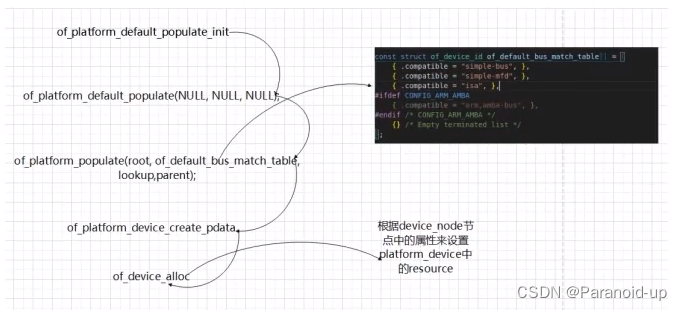
- of_default_bus_match_table
- arm
- arm64
- of_platform_register_reconfig_notifier
- Linux内核是如何将device_node转换成platform_device
- of_platform_populate函数
- 处理根节点下的子节点(匹配规则2)
设备树替换了平台总线模型当中对硬件资源描述的device部分。所以设备树也是对硬件资源进行描述的文件。
在平台总线模型中,device部分是用platform_device结构体来描述硬件资源的。所以内核最终会将内核认识的device_node树转换platform_device。
但是并不是所有的节点都会被转换成platform_device,只有满足要求的才会转换成platform_device,
转换成platformdevice的节点可以在/sys/bus/platform/devices下查看。
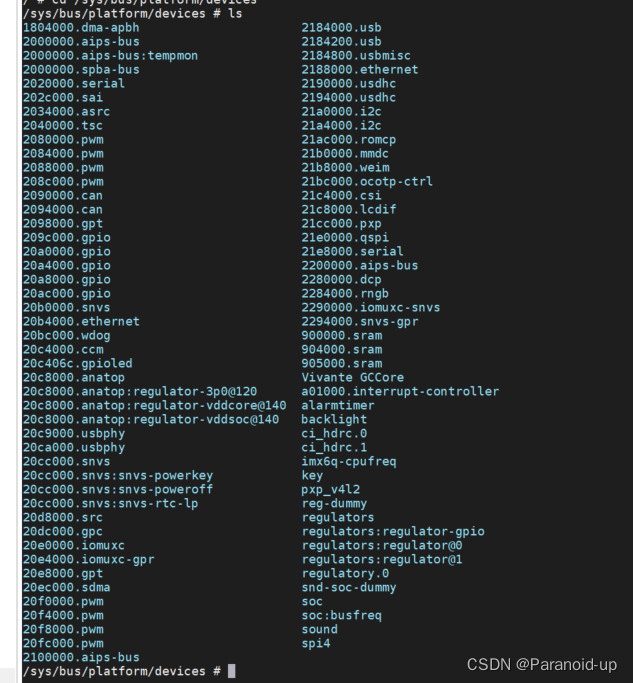
节点要满足什么要求才会被转换成platform_device呢?
转换规则
1.根节点下包含compatible属性的子节点。
2.节点中compatible属性包含simple-bus,simple-mfd,isa其中之一的节点下包含compatible属性的子节。
3.如果节点的compatible属性包含arm,primecell值,则对应的节点会被转换成不会被转换成amba设各。不会被转换成platform_device。
主要核心函数
of_default_bus_match_table
const struct of_device_id of_default_bus_match_table[] = {
{ .compatible = "simple-bus", },
{ .compatible = "simple-mfd", },
#ifdef CONFIG_ARM_AMBA
{ .compatible = "arm,amba-bus", },
#endif /* CONFIG_ARM_AMBA */
{} /* Empty terminated list */
};
arm
static int __init customize_machine(void)
{
/*
* customizes platform devices, or adds new ones
* On DT based machines, we fall back to populating the
* machine from the device tree, if no callback is provided,
* otherwise we would always need an init_machine callback.
*/
of_iommu_init();
if (machine_desc->init_machine)
machine_desc->init_machine();
#ifdef CONFIG_OF
else
of_platform_populate(NULL, of_default_bus_match_table,
NULL, NULL);
#endif
return 0;
}
arch_initcall(customize_machine);
arm64
在内核启动的时候会执行of_platform_default_populate_init函数,这个函数是用arch_initcall_sync来修饰的。
arch_initcall_sync(of_platform_default_populate_init);
所以系统启动的时候会调用of_platform_default_populate_init函数,然后调用一系列函数进行转换,转换流程如下,
arch/arm64/kernel/setup.c
static int __init arm64_device_init(void)
{
of_iommu_init();
of_platform_populate(NULL, of_default_bus_match_table, NULL, NULL);
return 0;
}
arch_initcall_sync(arm64_device_init);
of_platform_register_reconfig_notifier
int __init platform_bus_init(void)
{
int error;
early_platform_cleanup();
error = device_register(&platform_bus);
if (error)
return error;
error = bus_register(&platform_bus_type);
if (error)
device_unregister(&platform_bus);
of_platform_register_reconfig_notifier();
return error;
}
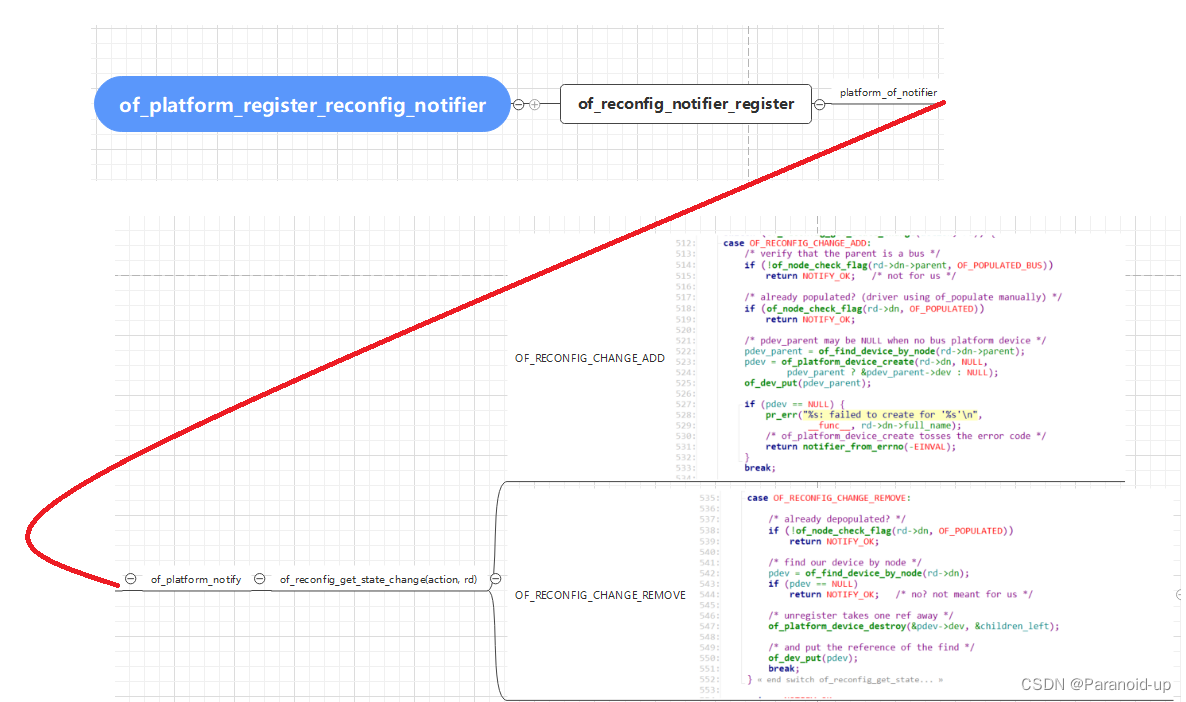
of_platform_notify函数是Linux内核中的一个通知机制,主要作用是把动态加载的设备树的节点解析出来,以便在驱动模型的基础上构建实际的设备驱动。在platform总线上的控制器模块都是挂在这条总线上,而of_platform_notify函数则是把这些控制器模块挂载到内核中。
在这个函数中,当动态加载一个设备树节点时,会先检查其父节点是否为一个总线,如果不是则返回NOTIFY_OK;如果已经被挂载,则返回NOTIFY_OK;否则会创建一个platform_device并将其挂载到内核中。当卸载一个设备树节点时,会先检查其是否已经被卸载,如果没有则会找到该设备并将其从内核中卸载。
static int of_platform_notify(struct notifier_block *nb,
unsigned long action, void *arg)
{
struct of_reconfig_data *rd = arg;
struct platform_device *pdev_parent, *pdev;
bool children_left;
switch (of_reconfig_get_state_change(action, rd)) {
case OF_RECONFIG_CHANGE_ADD:
/* verify that the parent is a bus */
if (!of_node_check_flag(rd->dn->parent, OF_POPULATED_BUS))
return NOTIFY_OK; /* not for us */
/* already populated? (driver using of_populate manually) */
if (of_node_check_flag(rd->dn, OF_POPULATED))
return NOTIFY_OK;
/* pdev_parent may be NULL when no bus platform device */
pdev_parent = of_find_device_by_node(rd->dn->parent);
pdev = of_platform_device_create(rd->dn, NULL,
pdev_parent ? &pdev_parent->dev : NULL);
of_dev_put(pdev_parent);
if (pdev == NULL) {
pr_err("%s: failed to create for '%s'\n",
__func__, rd->dn->full_name);
/* of_platform_device_create tosses the error code */
return notifier_from_errno(-EINVAL);
}
break;
case OF_RECONFIG_CHANGE_REMOVE:
/* already depopulated? */
if (!of_node_check_flag(rd->dn, OF_POPULATED))
return NOTIFY_OK;
/* find our device by node */
pdev = of_find_device_by_node(rd->dn);
if (pdev == NULL)
return NOTIFY_OK; /* no? not meant for us */
/* unregister takes one ref away */
of_platform_device_destroy(&pdev->dev, &children_left);
/* and put the reference of the find */
of_dev_put(pdev);
break;
}
return NOTIFY_OK;
}
static struct notifier_block platform_of_notifier = {
.notifier_call = of_platform_notify,
};
void of_platform_register_reconfig_notifier(void)
{
WARN_ON(of_reconfig_notifier_register(&platform_of_notifier));
}
#endif /* CONFIG_OF_DYNAMIC */
#endif /* CONFIG_OF_ADDRESS */
Linux内核是如何将device_node转换成platform_device
of_platform_populate函数
该函数主要调用了of_platform_populate函数
drivers/of/platform.c
of_platform_populate函数是Linux内核中的一个函数,主要作用是将设备树中的device node创建成platform device,为后续和各类驱动的platform driver匹配做准备。在Linux内核启动时,内核通过of_platform_populate函数,将dts中的device node创建成platform device。
of_platform_populate函数定义如下所示:
int of_platform_populate(struct device_node *root,
const struct of_device_id *matches,
const struct of_dev_auxdata *lookup,
struct device *parent)
其中,root是第一级要探测的父节点或NULL表示树的根;matches是匹配表,NULL表示使用默认值;lookup是用于匹配id和platform_data与设备节点的auxdata表;parent是要挂载设备的父节点,NULL表示顶层。详细内容如下:
int of_platform_populate(struct device_node *root,
const struct of_device_id *matches,
const struct of_dev_auxdata *lookup,
struct device *parent)
{
struct device_node *child;
int rc = 0;
root = root ? of_node_get(root) : of_find_node_by_path("/");
if (!root)
return -EINVAL;
for_each_child_of_node(root, child) {
rc = of_platform_bus_create(child, matches, lookup, parent, true);
if (rc)
break;
}
of_node_set_flag(root, OF_POPULATED_BUS);
of_node_put(root);
return rc;
}
of_platform_populate
of_platform_bus_create
static int of_platform_bus_create(struct device_node *bus,
const struct of_device_id *matches,
const struct of_dev_auxdata *lookup,
struct device *parent, bool strict)
{
const struct of_dev_auxdata *auxdata;
struct device_node *child;
struct platform_device *dev;
const char *bus_id = NULL;
void *platform_data = NULL;
int rc = 0;
/* Make sure it has a compatible property */
if (strict && (!of_get_property(bus, "compatible", NULL))) {
pr_debug("%s() - skipping %s, no compatible prop\n",
__func__, bus->full_name);
return 0;
}
auxdata = of_dev_lookup(lookup, bus);
if (auxdata) {
bus_id = auxdata->name;
platform_data = auxdata->platform_data;
}
if (of_device_is_compatible(bus, "arm,primecell")) {
/*
* Don't return an error here to keep compatibility with older
* device tree files.
*/
of_amba_device_create(bus, bus_id, platform_data, parent);
return 0;
}
dev = of_platform_device_create_pdata(bus, bus_id, platform_data, parent);
if (!dev || !of_match_node(matches, bus))
return 0;
for_each_child_of_node(bus, child) {
pr_debug(" create child: %s\n", child->full_name);
rc = of_platform_bus_create(child, matches, lookup, &dev->dev, strict);
if (rc) {
of_node_put(child);
break;
}
}
of_node_set_flag(bus, OF_POPULATED_BUS);
return rc;
}
转换规则1
if (strict && (!of_get_property(bus, “compatible”, NULL))) {
pr_debug(“%s() - skipping %s, no compatible prop\n”,
func, bus->full_name);
return 0;
}
转换规则3
if (of_device_is_compatible(bus, "arm,primecell")) {
/*
* Don't return an error here to keep compatibility with older
* device tree files.
*/
of_amba_device_create(bus, bus_id, platform_data, parent);
return 0;
}
处理根节点下的子节点(匹配规则2)
dev = of_platform_device_create_pdata(bus, bus_id, platform_data, parent);
if (!dev || !of_match_node(matches, bus))
return 0;
for_each_child_of_node(bus, child) {
pr_debug(" create child: %s\n", child->full_name);
rc = of_platform_bus_create(child, matches, lookup, &dev->dev, strict);
if (rc) {
of_node_put(child);
break;
}
}
of_node_set_flag(bus, OF_POPULATED_BUS);
static int of_platform_bus_create(struct device_node *bus,
const struct of_device_id *matches,
const struct of_dev_auxdata *lookup,
struct device *parent, bool strict)
{
const struct of_dev_auxdata *auxdata;
struct device_node *child;
struct platform_device *dev;
const char *bus_id = NULL;
void *platform_data = NULL;
int rc = 0;
/* Make sure it has a compatible property */
if (strict && (!of_get_property(bus, "compatible", NULL))) {
pr_debug("%s() - skipping %s, no compatible prop\n",
__func__, bus->full_name);
return 0;
}
auxdata = of_dev_lookup(lookup, bus);
if (auxdata) {
bus_id = auxdata->name;
platform_data = auxdata->platform_data;
}
if (of_device_is_compatible(bus, "arm,primecell")) {
/*
* Don't return an error here to keep compatibility with older
* device tree files.
*/
of_amba_device_create(bus, bus_id, platform_data, parent);
return 0;
}
dev = of_platform_device_create_pdata(bus, bus_id, platform_data, parent);
if (!dev || !of_match_node(matches, bus))
return 0;
for_each_child_of_node(bus, child) {
pr_debug(" create child: %s\n", child->full_name);
rc = of_platform_bus_create(child, matches, lookup, &dev->dev, strict);
if (rc) {
of_node_put(child);
break;
}
}
of_node_set_flag(bus, OF_POPULATED_BUS);
return rc;
}
设备树转换成paltform_device以后就和平台总线模型一样啦。所以驱动和设备也会根据名字来匹配。匹配成功以后会执行驱动中的probe函数。
匹配优先级:name<id_table<of_match_table