Terminologies(名词)
状态(State)
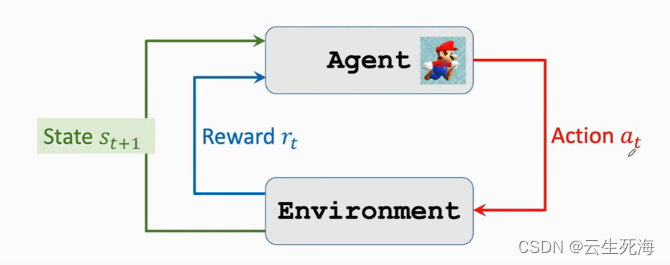
每个时刻,环境有一个状态 (state),可以理解为对当前时刻环境的概括
状态(State) 有时也被称为观测(Observation),因为有时智能体并不能观测到环境改变后的全部,只能观测到部分。
环境(Environment)
环境 (environment) 是与智能体进行交互的对象,可以抽象地理解为交互过程中的规则或机制。
动作(Action)
动作 (action) 是智能体基于当前状态所做出的决策。
智能体(Agent)
强化学习的主体被称为智能体 (agent)。通俗地说,由谁做动作或决策,谁就是智能体。
状态空间(State Space)
状态空间 (state space) 是指所有可能存在状态的集合,记作花体字母 S。
状态空间可以是离散的,也可以是连续的。状态空间可以是有限集合,也可以是无限可数集合。
动作空间(Action Apace)
动作空间 (action space) 是指所有可能动作的集合,记作花体字母 A
动作空间可以是离散集合或连续集合,可以是有限集合或无限集合。
策略(Policy)
**策略 (policy)**根据观测到的状态,如何做出决策,即如何从动作空间中选取一个动作。
π
(
a
∣
s
)
=
P
(
A
=
a
∣
S
=
s
)
π(a|s) = P(A=a|S=s)
π(a∣s)=P(A=a∣S=s)
强化学习的目标就是得到一个策略函数 (policy function),也叫π函数 ( function) ,在每个时刻根据观测到的状态做出决策。策略可以是确定性的,也可以是随机性的,两种都非常有用。
奖励(Reward)
奖励 (reward) 是指在智能体执行一个动作之后,环境返回给智能体的一个数值。奖励往往由我们自己来定义,奖励定义得好坏非常影响强化学习的结果。
状态转移(State transition)
状态转移 (state transition) 是指智能体从当前
t
t
t时刻的状态
s
s
s转移到下一个时刻状态为
s
′
s'
s′的过程
我们用状态转移概率函数 (state transition probability function) 来描述状态转移,记作
p
t
(
s
′
∣
s
,
a
)
=
P
(
S
t
+
1
′
=
s
′
∣
S
t
=
s
,
A
t
=
a
)
p_t(s'|s,a) = P(S'_{t+1}=s'|S_t=s,A_t=a)
pt(s′∣s,a)=P(St+1′=s′∣St=s,At=a)
表示这个事件的概率: 在当前状态
s
s
s ,智能体执行动作
a
a
a,环境的状态变成
s
′
s'
s′
马尔可夫决策过程 (Markov decision process, MDP)
强化学习的数学基础和建模工具是马尔可夫决策过程 (Markov decision process,MDP)
一个 MDP 通常由状态空间、动作空间、状态转移函数、奖励函数、折扣因子等组成。
Return and Value
回报(Return)
回报 (return) 是从当前时刻开始到本回合结束的所有奖励的总和,所以回报也叫做累计奖励 (cumulative future reward)。
把
t
t
t时刻的回报记作随机变量
U
t
U_t
Ut。如果一回合游戏结束,已经观测到所有奖励,那么就把回报记作
u
t
u_t
ut。设本回合在时刻
n
n
n结束。定义回报为:
U
t
=
R
t
+
R
t
+
1
+
R
t
+
2
+
R
t
+
3
+
.
.
.
+
R
n
U_t = R_t+R_{t+1}+R_{t+2}+R_{t+3}+...+R_{n}
Ut=Rt+Rt+1+Rt+2+Rt+3+...+Rn
回报是未来获得的奖励总和,所以智能体的目标就是让回报尽量大,越大越好。强化学习的目标就是寻找一个策略,使得回报的期望最大化。这个策略称为最优策略 (optimum policy)。
折扣回报(Discounted Return)
在 MDP 中,通常使用折扣回报 (discounted return),给未来的奖励做折扣。折扣回报的定义如下:
U
t
=
R
t
+
γ
R
t
+
1
+
γ
2
R
t
+
2
+
γ
3
R
t
+
3
+
.
.
.
U_t = R_t+\gamma R_{t+1}+\gamma ^2R_{t+2}+\gamma ^3R_{t+3}+...
Ut=Rt+γRt+1+γ2Rt+2+γ3Rt+3+...
这里的
γ
∈
[
0
,
1
]
\gamma \in [0,1]
γ∈[0,1]叫折扣率。对待越久远的未来,给奖励打的折扣越大。
t
t
t时刻当前状态
s
t
s_t
st和策略函数
π
(
a
∣
s
)
\pi(a|s)
π(a∣s)选取动作
a
t
a_t
at然后状态转移
p
t
(
s
′
∣
s
,
a
)
=
P
(
S
t
+
1
′
=
s
′
∣
S
t
=
s
,
A
t
=
a
)
p_t(s'|s,a) = P(S'_{t+1}=s'|S_t=s,A_t=a)
pt(s′∣s,a)=P(St+1′=s′∣St=s,At=a)选取新的状态
S
t
+
1
′
=
s
′
S'_{t+1}=s'
St+1′=s′
奖励
R
i
R_i
Ri只依赖于
S
i
S_i
Si和
A
i
A_i
Ai
动作价值函数(Action-value function)
假设我们已经观测到状态
s
t
s_t
st,而且做完决策,选中动作
a
t
a_t
at。那么
U
t
U_t
Ut中的随机性来自于
t
+
1
t+1
t+1时刻起的所有的状态和动作:
S
t
+
1
,
A
t
+
1
,
S
t
+
2
,
A
t
+
2
,
.
.
.
,
S
n
,
A
n
S_{t+1},A_{t+1},S_{t+2},A_{t+2},...,S_{n},A_{n}
St+1,At+1,St+2,At+2,...,Sn,An
对
U
t
U_t
Ut关于变量
S
t
+
1
,
A
t
+
1
,
S
t
+
2
,
A
t
+
2
,
.
.
.
,
S
n
,
A
n
S_{t+1},A_{t+1},S_{t+2},A_{t+2},...,S_{n},A_{n}
St+1,At+1,St+2,At+2,...,Sn,An求条件期望,得到
Q
π
(
s
t
,
a
t
)
=
E
S
t
+
1
,
A
t
+
1
,
S
t
+
2
,
A
t
+
2
,
.
.
.
,
S
n
,
A
n
[
U
t
∣
S
t
=
s
t
,
A
t
=
a
t
]
Q_\pi(s_t,a_t)=E_{{S_{t+1},A_{t+1},S_{t+2},A_{t+2},...,S_{n},A_{n}}}[U_t | St=s_t,A_t=a_t]
Qπ(st,at)=ESt+1,At+1,St+2,At+2,...,Sn,An[Ut∣St=st,At=at]
期望中的
S
t
=
s
t
S_t=s_t
St=st和
A
t
=
a
t
A_t=a_t
At=at是条件,意思是已经观测到
S
t
S_t
St与
A
t
A_t
At的值。条件期望的结果
Q
π
(
s
t
,
a
t
)
Q_\pi(s_t,a_t)
Qπ(st,at)被称作动作价值函数 (action-value function)。
动作价值函数
Q
π
(
s
t
,
a
t
)
Q_\pi(s_t,a_t)
Qπ(st,at)依赖于
s
t
s_t
st与
a
t
a_t
at,而不依赖于
t
+
1
t+1
t+1时刻及其之后的状态和动作,因为随机变量
S
t
+
1
,
A
t
+
1
,
S
t
+
2
,
A
t
+
2
,
⋯
,
S
n
,
A
n
S_{t+1},A_{t+1},S_{t+2},A_{t+2},\cdots,S_{n},A_{n}
St+1,At+1,St+2,At+2,⋯,Sn,An都被期望消除了。
作用:根据策略
π
,
Q
π
(
s
,
a
)
\pi,Q_\pi(s,a)
π,Qπ(s,a)来估计当前状态
s
s
s对于智能体选择动作
a
a
a是否明智,得到好的效果
最优动作价值函数(Optimal action-value function)
最优动作价值函数
Q
∗
(
s
t
,
a
t
)
Q^*(s_t,a_t)
Q∗(st,at)用最大化消除策略
π
\pi
π:
Q
∗
(
s
t
,
a
t
)
=
m
a
x
π
Q
π
(
s
t
,
a
t
)
Q^*(s_t,a_t)=max_\pi Q_\pi(s_t,a_t)
Q∗(st,at)=maxπQπ(st,at)
Q
∗
Q^*
Q∗可以对当前状态
s
s
s对执行动作
a
a
a做评测
状态价值函数(State-value function)
状态价值函数 (state-value function):
V
π
(
s
t
)
=
E
A
t
∼
π
(
.
∣
s
t
)
[
Q
π
(
s
t
,
A
t
)
]
=
∑
a
∈
A
π
(
a
∣
s
t
)
Q
π
(
s
t
,
a
)
V_\pi(s_t)=E_{A_{t\sim\pi(.|s_t)}}[Q_\pi(s_t,A_t)]=\sum \limits_{a\in A}\pi(a|s_t)Q_\pi(s_t,a)
Vπ(st)=EAt∼π(.∣st)[Qπ(st,At)]=a∈A∑π(a∣st)Qπ(st,a)
公式里把动作
A
t
A_t
At作为随机变量,然后关于
A
t
A_t
At 求期望,把
A
t
A_t
At消掉。得到的状态价值函数
V
π
(
s
t
)
V_\pi(s_t)
Vπ(st) 只依赖于策略
π
\pi
π与当前状态
s
t
s_t
st,不依赖于动作。
状态价值函数
V
π
(
s
t
)
V_\pi(s_t)
Vπ(st) 也是回报
U
t
U_t
Ut 的期望:
V
π
(
s
t
)
=
E
S
t
+
1
,
A
t
+
1
,
S
t
+
2
,
A
t
+
2
,
.
.
.
,
S
n
,
A
n
[
U
t
∣
S
t
=
s
t
]
V_\pi(s_t) = E_{{S_{t+1},A_{t+1},S_{t+2},A_{t+2},...,S_{n},A_{n}}}[U_t | St=s_t]
Vπ(st)=ESt+1,At+1,St+2,At+2,...,Sn,An[Ut∣St=st] 期望消掉了
U
t
U_t
Ut 依赖的随机变量
S
t
+
1
,
A
t
+
1
,
S
t
+
2
,
A
t
+
2
,
.
.
.
,
S
n
,
A
n
S_{t+1},A_{t+1},S_{t+2},A_{t+2},...,S_{n},A_{n}
St+1,At+1,St+2,At+2,...,Sn,An状态价值越大,就意味着回报的期望越大。用状态价值可以衡量策略
π
\pi
π与状态
s
t
s_t
st的好坏。
作用:根据策略
π
,
V
π
(
s
)
\pi,V_\pi(s)
π,Vπ(s)来估计当前状态
s
s
s是好是坏,策略
π
\pi
π固定,状态
s
s
s越好
V
V
V的值越大。
E
s
[
V
π
(
S
)
]
E_s[V_\pi(S)]
Es[Vπ(S)]来评估策略
π
\pi
π的效果
如何控制智能体agent的动作?
法一 策略
π
(
a
∣
s
)
\pi(a|s)
π(a∣s)
观察状态
s
t
s_t
st,随机选择动作
a
t
∼
π
(
.
∣
s
t
)
a_t\sim \pi( .|s_t)
at∼π(.∣st)
法二 动作价值函数
Q
∗
(
s
,
a
)
Q^*(s,a)
Q∗(s,a)
观察状态
s
t
s_t
st,选择最大价值的动作
a
t
=
a
r
g
m
a
x
a
Q
∗
(
s
t
,
a
)
a_t = argmax_aQ^*(s_t,a)
at=argmaxaQ∗(st,a)