离散时间多智能体系统编队-包围控制研究_李博凡
文章目录
- 第四章 基于间歇控制的离散时间多智能体系统编队-包围控制
- 4.1 引言
- 4.2 基于状态反馈的离散时间间歇多智能体系统编队-包围控制
- 4.2.1 模型描述
- 4.2.2 稳定性分析
- 4.3 基于观测器的离散时间间歇多智能体系统编队-包围控制
- 4.3.1 模型描述
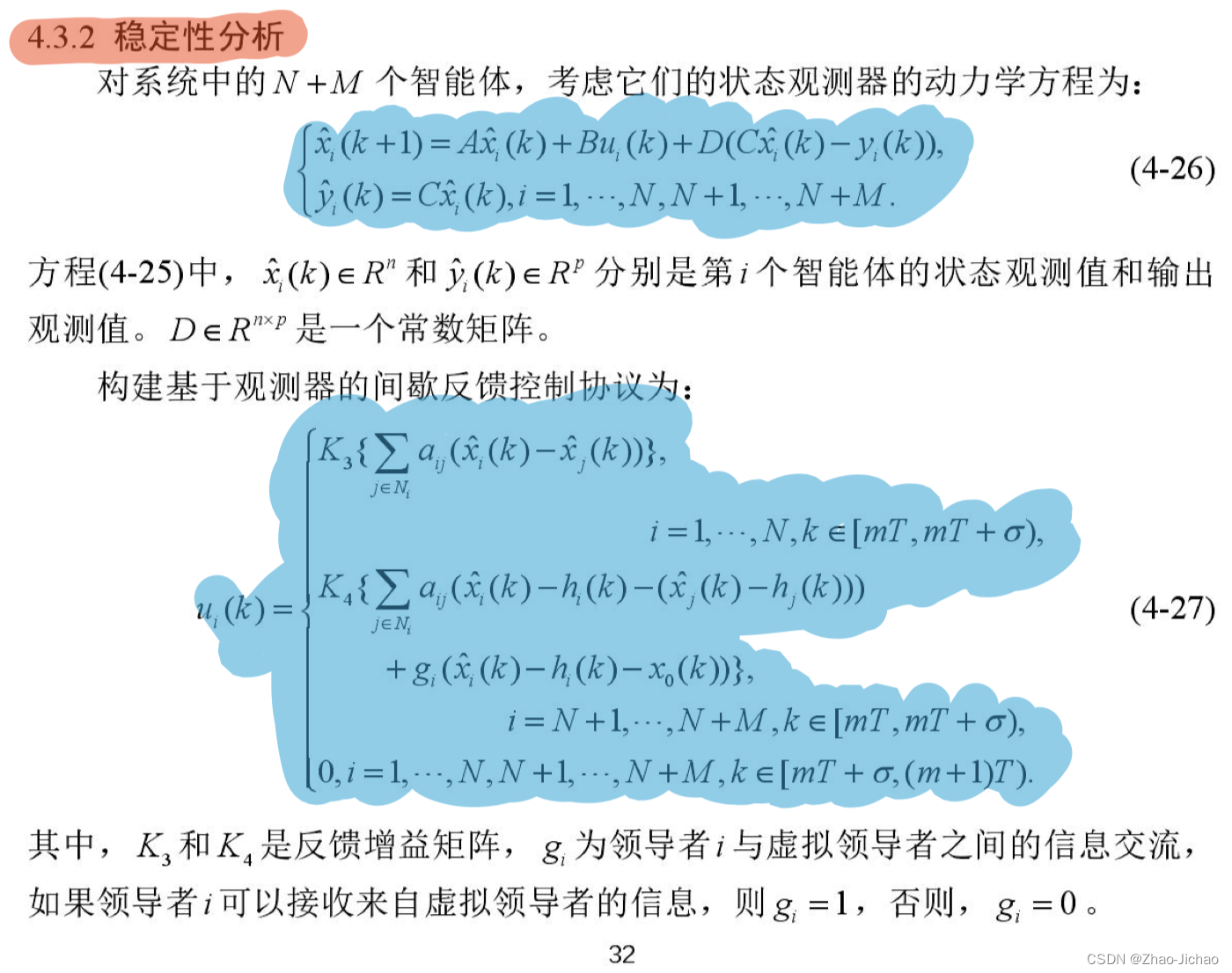
- 4.3.2 稳定性分析
- 4.4 仿真分析
第四章 基于间歇控制的离散时间多智能体系统编队-包围控制
4.1 引言
4.2 基于状态反馈的离散时间间歇多智能体系统编队-包围控制
4.2.1 模型描述

4.2.2 稳定性分析

4.3 基于观测器的离散时间间歇多智能体系统编队-包围控制
4.3.1 模型描述

4.3.2 稳定性分析
4.4 仿真分析
针对论文中图 4-2,图4-3和图4-4的复现结果如下,对应程序 Main.m



针对论文中图 4-5,图4-6和图4-7的复现结果如下,对应程序 Main_Observer.m