- 安装octomap_ros和rviz插件
sudo apt-get install ros-indigo-octomap* - 源码安装:turtlebot_exploration_3d(本机为Ubuntu16对应的ros版本为kinetic,但是无对应的版本,用的是ubuntu14的indigo,版本向前兼容,故可以运行)
-
cd turtlebot_ws/src git clone https://github.com/RobustFieldAutonomyLab/turtlebot_exploration_3d.git catkin_make - deb包安装:
-
sudo apt-get update sudo apt-get install ros-indigo-turtlebot-exploration-3d运行:
- 主机端,新终端,执行:
-
$ roslaunch turtlebot_exploration_3d minimal_explo.launch $ roslaunch turtlebot_exploration_3d turtlebot_gmapping.launch $ rosrun turtlebot_exploration_3d turtlebot_exploration_3d - 从机端,新终端,执行:
-
roslaunch turtlebot_exploration_3d exploration_rviz.launch
对应的脚本信息如下:
minimal_explo.launch:
<launch>
<!-- Turtlebot -->
<arg name="base" default="$(env TURTLEBOT_BASE)"/> <!-- create, roomba -->
<arg name="battery" default="$(env TURTLEBOT_BATTERY)"/> <!-- /proc/acpi/battery/BAT0 in 2.6 or earlier kernels-->
<arg name="stacks" default="$(env TURTLEBOT_STACKS)"/> <!-- circles, hexagons -->
<arg name="3d_sensor" default="$(env TURTLEBOT_3D_SENSOR)"/> <!-- kinect, asus_xtion_pro -->
<arg name="simulation" default="$(env TURTLEBOT_SIMULATION)"/>
<arg name="serialport" default="$(env TURTLEBOT_SERIAL_PORT)"/> <!-- /dev/ttyUSB0, /dev/ttyS0 -->
<arg name="robot_name" default="$(env TURTLEBOT_NAME)"/>
<arg name="robot_type" default="$(env TURTLEBOT_TYPE)"/>
<param name="/use_sim_time" value="$(arg simulation)"/>
<include file="$(find turtlebot_bringup)/launch/includes/robot.launch.xml">
<arg name="base" value="$(arg base)" />
<arg name="stacks" value="$(arg stacks)" />
<arg name="3d_sensor" value="$(arg 3d_sensor)" />
</include>
<include file="$(find turtlebot_bringup)/launch/includes/mobile_base.launch.xml">
<arg name="base" value="$(arg base)" />
<arg name="serialport" value="$(arg serialport)" />
</include>
<include file="$(find turtlebot_bringup)/launch/includes/netbook.launch.xml">
<arg name="battery" value="$(arg battery)" />
</include>
<!-- Rapp Manager -->
<arg name="auto_rapp_installation" default="false"/> <!-- http://wiki.ros.org/rocon_app_manager/Tutorials/indigo/Automatic Rapp Installation -->
<arg name="auto_start_rapp" default=""/> <!-- autostart a rapp, e.g. rocon_apps/talker -->
<arg name="rapp_package_whitelist" default="$(env TURTLEBOT_RAPP_PACKAGE_WHITELIST)"/> <!-- comma separated list of package names -->
<arg name="rapp_package_blacklist" default="$(env TURTLEBOT_RAPP_PACKAGE_BLACKLIST)"/>
<arg name="robot_icon" default="turtlebot_bringup/turtlebot2.png"/>
<arg name="screen" default="true"/> <!-- verbose output from running apps -->
<!-- ***************************** Rocon Master Info ************************** -->
<arg name="robot_description" default="Kick-ass ROS turtle"/>
<!-- Capabilities -->
<arg name="capabilities" default="true"/> <!-- enable/disable a capability server -->
<arg name="capabilities_server_name" default="capability_server"/>
<arg name="capabilities_nodelet_manager_name" default="capability_server_nodelet_manager" />
<arg name="capabilities_parameters" default="$(find turtlebot_bringup)/param/capabilities/defaults_tb2.yaml" /> <!-- defaults_tb.yaml, defaults_tb2.yaml -->
<arg name="capabilities_package_whitelist" default="[kobuki_capabilities, std_capabilities, turtlebot_capabilities]" /> <!-- get capabilities from these packages only -->
<arg name="capabilities_blacklist" default="['std_capabilities/Navigation2D', 'std_capabilities/MultiEchoLaserSensor']" /> <!-- blacklist specific capabilities -->
<!-- Interactions -->
<arg name="interactions" default="true"/>
<arg name="interactions_list" default="$(optenv INTERACTIONS_LIST [turtlebot_bringup/admin.interactions, turtlebot_bringup/documentation.interactions, turtlebot_bringup/pairing.interactions])"/>
<!-- Zeroconf -->
<arg name="zeroconf" default="true"/>
<arg name="zeroconf_name" default="$(arg robot_name)"/>
<arg name="zeroconf_port" default="11311"/>
<!-- Rapp Manager -->
<include file="$(find rocon_app_manager)/launch/standalone.launch">
<!-- Rapp Manager -->
<arg name="robot_name" value="$(arg robot_name)" />
<arg name="robot_type" value="$(arg robot_type)" />
<arg name="robot_icon" value="$(arg robot_icon)" />
<arg name="rapp_package_whitelist" value="$(arg rapp_package_whitelist)" />
<arg name="rapp_package_blacklist" value="$(arg rapp_package_blacklist)" />
<arg name="auto_start_rapp" value="$(arg auto_start_rapp)" />
<arg name="screen" value="$(arg screen)" />
<arg name="auto_rapp_installation" value="$(arg auto_rapp_installation)" />
<!-- Rocon Master Info -->
<arg name="robot_description" value="$(arg robot_description)" />
<!-- Capabilities -->
<arg name="capabilities" value="$(arg capabilities)" />
<arg name="capabilities_blacklist" value="$(arg capabilities_blacklist)" />
<arg name="capabilities_nodelet_manager_name" value="$(arg capabilities_nodelet_manager_name)" />
<arg name="capabilities_server_name" value="$(arg capabilities_server_name)" />
<arg name="capabilities_package_whitelist" value="$(arg capabilities_package_whitelist)" />
<arg name="capabilities_parameters" value="$(arg capabilities_parameters)" />
<!-- Interactions -->
<arg name="interactions" value="$(arg interactions)"/>
<arg name="interactions_list" value="$(arg interactions_list)"/>
<!-- Zeroconf -->
<arg name="zeroconf" value="$(arg zeroconf)"/>
<arg name="zeroconf_name" value="$(arg zeroconf_name)"/>
<arg name="zeroconf_port" value="$(arg zeroconf_port)"/>
</include>
</launch>
turtlebot_gmapping.launch:
<launch>
<!-- <node pkg="hokuyo_node" type="hokuyo_node" name="hokuyo" />
-->
<include file="$(find turtlebot_bringup)/launch/3dsensor.launch">
<!-- <arg name="rgb_processing" value="true" />
<arg name="depth_registration" value="true" />
<arg name="depth_processing" value="true" />
<arg name="scan_processing" value="true" /> -->
<!-- We must specify an absolute topic name because if not it will be prefixed by "$(arg camera)".
Probably is a bug in the nodelet manager: https://github.com/ros/nodelet_core/issues/7 -->
<arg name="scan_topic" value="/scan_kinect" />
</include>
<node pkg="tf" type="static_transform_publisher" name="base_footprint_to_laser" args="0 0 0.35 0 0 0 base_footprint laser 50" />
<arg name="scan_topic" default="scan_kinect" />
<arg name="base_frame" default="base_footprint"/>
<arg name="odom_frame" default="odom"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="scan_topic" value="$(arg scan_topic)"/>
<param name="base_frame" value="$(arg base_frame)"/>
<param name="odom_frame" value="$(arg odom_frame)"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="7.9"/>
<param name="maxRange" value="8.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="200"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="80"/>
<!--
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
make the starting size small for the benefit of the Android client's memory...
-->
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.01"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
<include file="$(find turtlebot_navigation)/launch/includes/move_base.launch.xml"/>
<node pkg="turtlebot_exploration_3d" type="scan_to_pcl" name="scan_to_pcl" />
</launch>
turtlebot_exploration_3d.cpp:
// Related headers:
#include "exploration.h"
#include "navigation_utils.h"
#include "gpregressor.h"
#include "covMaterniso3.h"
//C library headers:
#include <iostream>
#include <fstream>
// #include <chrono>
// #include <iterator>
// #include <ctime>
//C++ library headers: NONE
#include <visualization_msgs/Marker.h>
#include <visualization_msgs/MarkerArray.h>
//other library headers: NONE
using namespace std;
int main(int argc, char **argv) {
ros::init(argc, argv, "turtlebot_exploration_3d");
ros::NodeHandle nh;
// Initialize time
time_t rawtime;
struct tm * timeinfo;
char buffer[80];
time (&rawtime);
timeinfo = localtime(&rawtime);
// strftime(buffer,80,"Trajectory_%R_%S_%m%d_DA.txt",timeinfo);
// std::string logfilename(buffer);
// std::cout << logfilename << endl;
strftime(buffer,80,"Octomap3D_%m%d_%R_%S.ot",timeinfo);
octomap_name_3d = buffer;
ros::Subscriber kinect_sub = nh.subscribe<sensor_msgs::PointCloud2>("/camera/depth_registered/points", 1, kinectCallbacks);// need to change##########
ros::Publisher GoalMarker_pub = nh.advertise<visualization_msgs::Marker>( "Goal_Marker", 1 );
ros::Publisher Candidates_pub = nh.advertise<visualization_msgs::MarkerArray>("Candidate_MIs", 1);
ros::Publisher Frontier_points_pub = nh.advertise<visualization_msgs::Marker>("Frontier_points", 1);
ros::Publisher pub_twist = nh.advertise<geometry_msgs::Twist>("/cmd_vel_mux/input/teleop", 1);
ros::Publisher Octomap_pub = nh.advertise<octomap_msgs::Octomap>("octomap_3d",1);
tf_listener = new tf::TransformListener();
tf::StampedTransform transform;
tf::Quaternion Goal_heading; // robot's heading direction
visualization_msgs::MarkerArray CandidatesMarker_array;
visualization_msgs::Marker Frontier_points_cubelist;
geometry_msgs::Twist twist_cmd;
ros::Time now_marker = ros::Time::now();
// Initialize parameters
int max_idx = 0;
point3d Sensor_PrincipalAxis(1, 0, 0);
octomap::OcTreeNode *n;
octomap::OcTree new_tree(octo_reso);
octomap::OcTree new_tree_2d(octo_reso);
cur_tree = &new_tree;
cur_tree_2d = &new_tree_2d;
point3d next_vp;
bool got_tf = false;
bool arrived;
// Update the initial location of the robot
for(int i =0; i < 6; i++){
// Update the pose of the robot
got_tf = false;
while(!got_tf){
try{
tf_listener->lookupTransform("/map", "/camera_rgb_frame", ros::Time(0), transform);// need to change tf of kinect###############
kinect_orig = point3d(transform.getOrigin().x(), transform.getOrigin().y(), transform.getOrigin().z());
got_tf = true;
}
catch (tf::TransformException ex) {
ROS_WARN("Wait for tf: Kinect frame");
}
ros::Duration(0.05).sleep();
}
// Take a Scan
ros::spinOnce();
// Rotate another 60 degrees
twist_cmd.linear.x = twist_cmd.linear.y = twist_cmd.angular.z = 0;
ros::Time start_turn = ros::Time::now();
ROS_WARN("Rotate 60 degrees");
while (ros::Time::now() - start_turn < ros::Duration(2.6)){ // turning duration - second
twist_cmd.angular.z = 0.6; // turning speed
// turning angle = turning speed * turning duration / 3.14 * 180
pub_twist.publish(twist_cmd);
ros::Duration(0.05).sleep();
}
// stop
twist_cmd.angular.z = 0;
pub_twist.publish(twist_cmd);
}
// steps robot taken, counter
int robot_step_counter = 0;
while (ros::ok())
{
vector<vector<point3d>> frontier_groups=extractFrontierPoints(cur_tree);
//frontier_groups.clear();//in the next line
unsigned long int o = 0;
for(vector<vector<point3d>>::size_type e = 0; e < frontier_groups.size(); e++) {
o = o+frontier_groups[e].size();
}
Frontier_points_cubelist.points.resize(o);
ROS_INFO("frontier points %ld", o);
now_marker = ros::Time::now();
Frontier_points_cubelist.header.frame_id = "map";
Frontier_points_cubelist.header.stamp = now_marker;
Frontier_points_cubelist.ns = "frontier_points_array";
Frontier_points_cubelist.id = 0;
Frontier_points_cubelist.type = visualization_msgs::Marker::CUBE_LIST;
Frontier_points_cubelist.action = visualization_msgs::Marker::ADD;
Frontier_points_cubelist.scale.x = octo_reso;
Frontier_points_cubelist.scale.y = octo_reso;
Frontier_points_cubelist.scale.z = octo_reso;
Frontier_points_cubelist.color.a = 1.0;
Frontier_points_cubelist.color.r = (double)255/255;
Frontier_points_cubelist.color.g = 0;
Frontier_points_cubelist.color.b = (double)0/255;
Frontier_points_cubelist.lifetime = ros::Duration();
unsigned long int t = 0;
int l = 0;
geometry_msgs::Point q;
for(vector<vector<point3d>>::size_type n = 0; n < frontier_groups.size(); n++) {
for(vector<point3d>::size_type m = 0; m < frontier_groups[n].size(); m++){
q.x = frontier_groups[n][m].x();
q.y = frontier_groups[n][m].y();
q.z = frontier_groups[n][m].z()+octo_reso;
Frontier_points_cubelist.points.push_back(q);
}
t++;
}
ROS_INFO("Publishing %ld frontier_groups", t);
Frontier_points_pub.publish(Frontier_points_cubelist); //publish frontier_points
Frontier_points_cubelist.points.clear();
// Generate Candidates
vector<pair<point3d, point3d>> candidates = extractCandidateViewPoints(frontier_groups, kinect_orig, num_of_samples);
std::random_shuffle(candidates.begin(),candidates.end()); // shuffle to select a subset
vector<pair<point3d, point3d>> gp_test_poses = candidates;
ROS_INFO("Candidate View Points: %luGenereated, %d evaluating...", candidates.size(), num_of_samples_eva);
int temp_size = candidates.size()-3;
if (temp_size < 1) {
ROS_ERROR("Very few candidates generated, maybe finishing with exploration...");
nh.shutdown();
return 0;
}
// Generate Testing poses
candidates.resize(min(num_of_samples_eva,temp_size));
frontier_groups.clear();
// Evaluate MI for every candidate view points
vector<double> MIs(candidates.size());
double before = countFreeVolume(cur_tree);
// int max_idx = 0;
double begin_mi_eva_secs, end_mi_eva_secs;
begin_mi_eva_secs = ros::Time::now().toSec();
#pragma omp parallel for
for(int i = 0; i < candidates.size(); i++)
{
auto c = candidates[i];
// Evaluate Mutual Information
Sensor_PrincipalAxis = point3d(1.0, 0.0, 0.0);
Sensor_PrincipalAxis.rotate_IP(c.second.roll(), c.second.pitch(), c.second.yaw() );
octomap::Pointcloud hits = castSensorRays(cur_tree, c.first, Sensor_PrincipalAxis);
// Considering pure MI for decision making
MIs[i] = calc_MI(cur_tree, c.first, hits, before);
// Normalize the MI with distance
// MIs[i] = calc_MI(cur_tree, c.first, hits, before) /
// sqrt(pow(c.first.x()-kinect_orig.x(),2) + pow(c.first.y()-kinect_orig.y(),2));
// Pick the Candidate view point with max MI
// if (MIs[i] > MIs[max_idx])
// {
// max_idx = i;
// }
}
// Bayesian Optimization for actively selecting candidate
double train_time, test_time;
GPRegressor g(100, 3, 0.01);
for (int bay_itr = 0; bay_itr < num_of_bay; bay_itr++) {
//Initialize gp regression
MatrixXf gp_train_x(candidates.size(), 2), gp_train_label(candidates.size(), 1), gp_test_x(gp_test_poses.size(), 2);
for (int i=0; i< candidates.size(); i++){
gp_train_x(i,0) = candidates[i].first.x();
gp_train_x(i,1) = candidates[i].first.y();
gp_train_label(i) = MIs[i];
}
for (int i=0; i< gp_test_poses.size(); i++){
gp_test_x(i,0) = gp_test_poses[i].first.x();
gp_test_x(i,1) = gp_test_poses[i].first.y();
}
// Perform GP regression
MatrixXf gp_mean_MI, gp_var_MI;
train_time = ros::Time::now().toSec();
g.train(gp_train_x, gp_train_label);
train_time = ros::Time::now().toSec() - train_time;
test_time = ros::Time::now().toSec();
g.test(gp_test_x, gp_mean_MI, gp_var_MI);
test_time = ros::Time::now().toSec() - test_time;
ROS_INFO("GP: Train(%zd) took %f secs , Test(%zd) took %f secs", candidates.size(), train_time, gp_test_poses.size(), test_time);
// Get Acquisition function
double beta = 2.4;
vector<double> bay_acq_fun(gp_test_poses.size());
for (int i = 0; i < gp_test_poses.size(); i++) {
bay_acq_fun[i] = gp_mean_MI(i) + beta*gp_var_MI(i);
}
vector<int> idx_acq = sort_MIs(bay_acq_fun);
// evaluate MI, add to the candidate
auto c = gp_test_poses[idx_acq[0]];
Sensor_PrincipalAxis = point3d(1.0, 0.0, 0.0);
Sensor_PrincipalAxis.rotate_IP(c.second.roll(), c.second.pitch(), c.second.yaw() );
octomap::Pointcloud hits = castSensorRays(cur_tree, c.first, Sensor_PrincipalAxis);
candidates.push_back(c);
MIs.push_back(calc_MI(cur_tree, c.first, hits, before));
}
end_mi_eva_secs = ros::Time::now().toSec();
ROS_INFO("Mutual Infomation Eva took: %3.3f Secs.", end_mi_eva_secs - begin_mi_eva_secs);
// Normalize the MI with distance
for(int i = 0; i < candidates.size(); i++) {
auto c = candidates[i];
MIs[i] = MIs[i] /
sqrt(pow(c.first.x()-kinect_orig.x(),2) + pow(c.first.y()-kinect_orig.y(),2));
}
// sort vector MIs, with idx_MI, descending
vector<int> idx_MI = sort_MIs(MIs);
// Publish the candidates as marker array in rviz
tf::Quaternion MI_heading;
MI_heading.setRPY(0.0, -PI/2, 0.0);
MI_heading.normalize();
CandidatesMarker_array.markers.resize(candidates.size());
for (int i = 0; i < candidates.size(); i++)
{
CandidatesMarker_array.markers[i].header.frame_id = "map";
CandidatesMarker_array.markers[i].header.stamp = ros::Time::now();
CandidatesMarker_array.markers[i].ns = "candidates";
CandidatesMarker_array.markers[i].id = i;
CandidatesMarker_array.markers[i].type = visualization_msgs::Marker::ARROW;
CandidatesMarker_array.markers[i].action = visualization_msgs::Marker::ADD;
CandidatesMarker_array.markers[i].pose.position.x = candidates[i].first.x();
CandidatesMarker_array.markers[i].pose.position.y = candidates[i].first.y();
CandidatesMarker_array.markers[i].pose.position.z = candidates[i].first.z();
CandidatesMarker_array.markers[i].pose.orientation.x = MI_heading.x();
CandidatesMarker_array.markers[i].pose.orientation.y = MI_heading.y();
CandidatesMarker_array.markers[i].pose.orientation.z = MI_heading.z();
CandidatesMarker_array.markers[i].pose.orientation.w = MI_heading.w();
CandidatesMarker_array.markers[i].scale.x = (double)2.0*MIs[i]/MIs[idx_MI[0]];
CandidatesMarker_array.markers[i].scale.y = 0.2;
CandidatesMarker_array.markers[i].scale.z = 0.2;
CandidatesMarker_array.markers[i].color.a = (double)MIs[i]/MIs[idx_MI[0]];
CandidatesMarker_array.markers[i].color.r = 0.0;
CandidatesMarker_array.markers[i].color.g = 1.0;
CandidatesMarker_array.markers[i].color.b = 0.0;
}
Candidates_pub.publish(CandidatesMarker_array);
CandidatesMarker_array.markers.clear();
candidates.clear();
// loop in the idx_MI, if the candidate with max MI cannot be achieved,
// switch to a sub-optimal MI.
arrived = false;
int idx_ptr = 0;
while (!arrived) {
// Setup the Goal
next_vp = point3d(candidates[idx_MI[idx_ptr]].first.x(),candidates[idx_MI[idx_ptr]].first.y(),candidates[idx_MI[idx_ptr]].first.z());
Goal_heading.setRPY(0.0, 0.0, candidates[idx_MI[idx_ptr]].second.yaw());
Goal_heading.normalize();
ROS_INFO("Max MI : %f , @ location: %3.2f %3.2f %3.2f", MIs[idx_MI[idx_ptr]], next_vp.x(), next_vp.y(), next_vp.z() );
// Publish the goal as a Marker in rviz
visualization_msgs::Marker marker;
marker.header.frame_id = "map";
marker.header.stamp = ros::Time();
marker.ns = "goal_marker";
marker.id = 0;
marker.type = visualization_msgs::Marker::ARROW;
marker.action = visualization_msgs::Marker::ADD;
marker.pose.position.x = next_vp.x();
marker.pose.position.y = next_vp.y();
marker.pose.position.z = 1.0;
marker.pose.orientation.x = Goal_heading.x();
marker.pose.orientation.y = Goal_heading.y();
marker.pose.orientation.z = Goal_heading.z();
marker.pose.orientation.w = Goal_heading.w();
marker.scale.x = 0.5;
marker.scale.y = 0.1;
marker.scale.z = 0.1;
marker.color.a = 1.0; // Don't forget to set the alpha!
marker.color.r = 1.0;
marker.color.g = 1.0;
marker.color.b = 0.0;
GoalMarker_pub.publish( marker );
// Send the Robot
arrived = goToDest(next_vp, Goal_heading);
if(arrived)
{
// Update the initial location of the robot
got_tf = false;
while(!got_tf){
try{
tf_listener->lookupTransform("/map", "/camera_rgb_frame", ros::Time(0), transform);// need to change tf of kinect###############
kinect_orig = point3d(transform.getOrigin().x(), transform.getOrigin().y(), transform.getOrigin().z());
got_tf = true;
}
catch (tf::TransformException ex) {
ROS_WARN("Wait for tf: Kinect frame");
}
ros::Duration(0.05).sleep();
}
// Update Octomap
ros::spinOnce();
ROS_INFO("Succeed, new Map Free Volume: %f", countFreeVolume(cur_tree));
robot_step_counter++;
// prepare octomap msg
octomap_msgs::binaryMapToMsg(*cur_tree, msg_octomap);
msg_octomap.binary = 1;
msg_octomap.id = 1;
msg_octomap.resolution = octo_reso;
msg_octomap.header.frame_id = "/map";
msg_octomap.header.stamp = ros::Time::now();
Octomap_pub.publish(msg_octomap);
ROS_INFO("Octomap updated in RVIZ");
// // Send out results to file.
// explo_log_file.open(logfilename, std::ofstream::out | std::ofstream::app);
// explo_log_file << "DA Step ," << robot_step_counter << ", Current Entropy ," << countFreeVolume(cur_tree) << ", time, " << ros::Time::now().toSec() << endl;
// explo_log_file.close();
}
else
{
ROS_WARN("Failed to drive to the %d th goal, switch to the sub-optimal..", idx_ptr);
idx_ptr++;
if(idx_ptr > MIs.size()) {
ROS_ERROR("None of the goal is valid for path planning, shuting down the node");
nh.shutdown();
}
}
}
// r.sleep();
}
nh.shutdown();
return 0;
}
exploration_rviz.launch:
<launch>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find turtlebot_exploration_3d)/launch/turtlebot_explo.rviz" />
</launch>
- 自动建图进行会比较慢,会显示octomap图,同时也实现了gmapping的建图
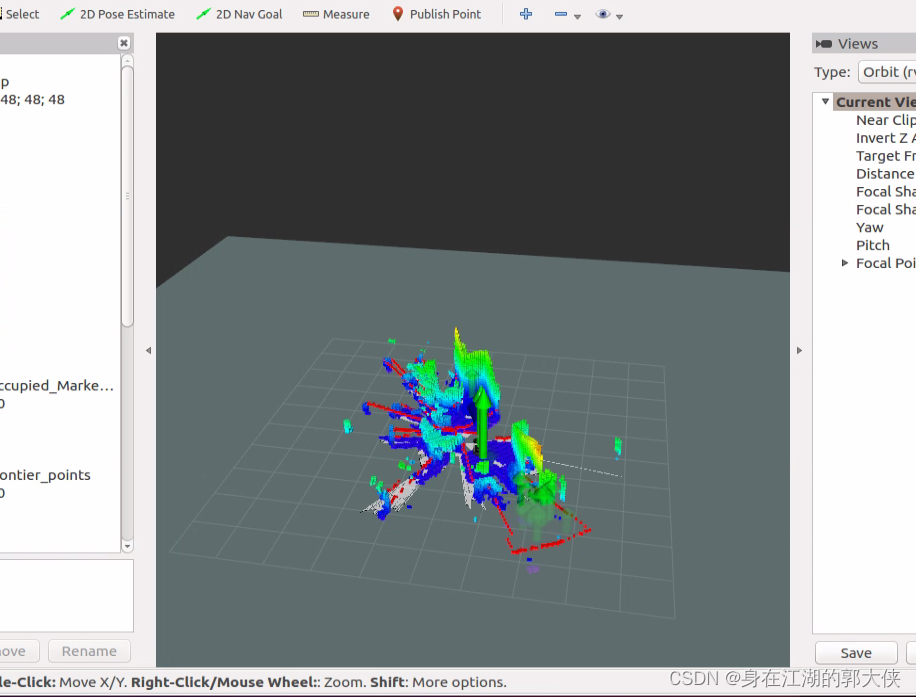
image: /home/ubuntu/map/zhizaokongjian.pgm
resolution: 0.050000
origin: [-12.200000, -12.200000, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
image: 含占用信息的image文件的路径;可以是绝对路径,也可以是到YAML文件的相对路径。
resolution:地图的分辨率,meters/pixel
origin: 机器人相对地图原点的位姿,(x,y,yaw),yaw逆时针旋转(yaw=0表示没有旋转)。
occupied_thresh:单元占用的概率大于这个阈值则认为完全占用。
free_thresh: 单元占用的概率小于这个阈值则认为完全自由。
negate: 不论白色/黑色,自由/占用,semantics(语义/符号)应该被反转(阈值的解释不受影响)。-
保存地图:
- 新建目录:
-
mkdir ~/map - 保存地图:
-
rosrun map_server map_saver -f ~/map1 -
得到两个文件如下:
- map1.pgm 地图
- map1.yaml 配置
-
map1.yaml样例:
- 必填的字节:


![[附源码]计算机毕业设计springboot家庭医生签约服务管理系统](https://img-blog.csdnimg.cn/7d39b4d997f14cafb34b19e7ab549a7b.png)




![[附源码]SSM计算机毕业设计亿上汽车在线销售管理系统JAVA](https://img-blog.csdnimg.cn/0b8a5c37dfb14e57af1341bf66b3d91d.png)