问题描述
使用ROS + vscode进行开发.
解决方案
1. 安装ROS和vscode.
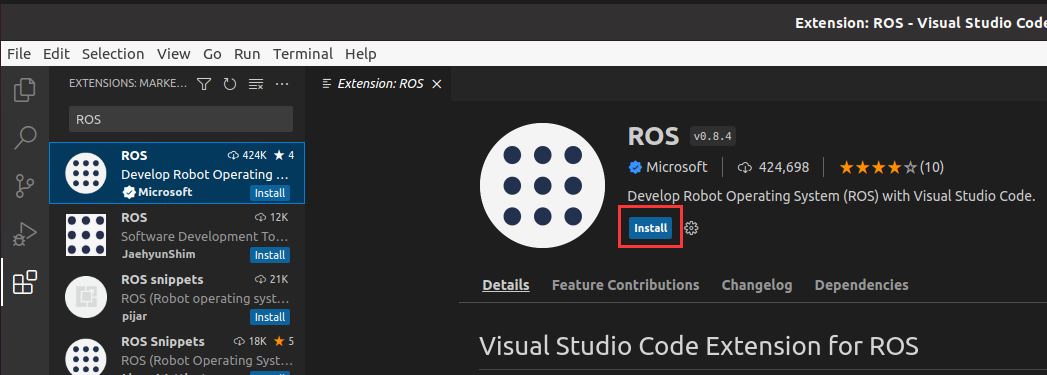
2. 打开vscode, 安装ROS插件.
3. 创建工作空间, 并进行一次catkin_make.
mkdir -p catkin_ws/src
cd catkin_ws/
catkin_make4. 用vscode打开工作空间.
cd catkin_ws/
code .vscode的ROS插件会自动配置好一些文件.
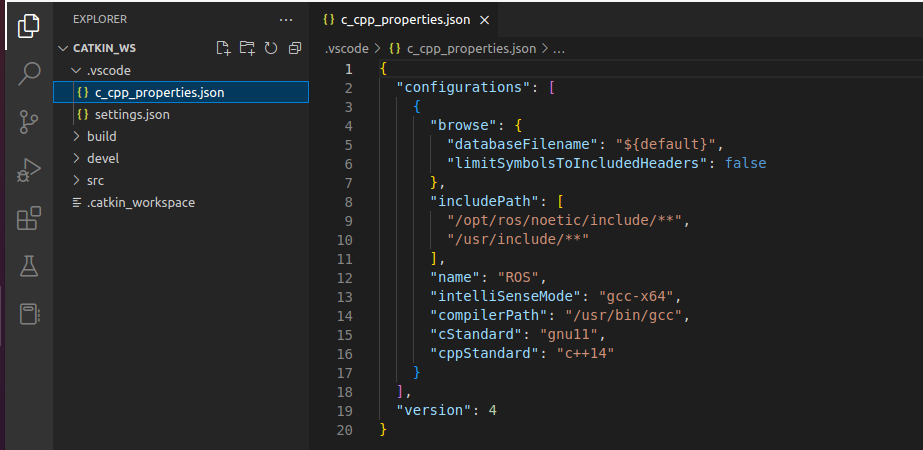
主要是可以帮助找到ROS相关的头文件.
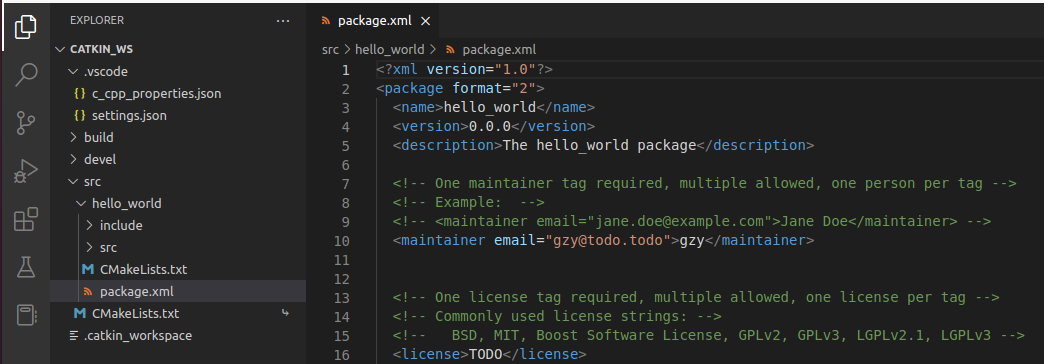
5. 创建功能包.
ctrl + shift + P, 输入“ROS:Create Catkin Package”.

输入功能包名称.

输入依赖.

创建成功.
在“src/”下创建“hello_world_node.cpp”.
#include "ros/ros.h"
int main(int argc, char *argv[])
{
ros::init(argc, argv, "hello_world");
ros::NodeHandle n;
ros::Rate loop_rate(10);
while (ros::ok())
{
ROS_INFO("hello world!");
loop_rate.sleep();
}
return 0;
}修改“hello_world/CMakeLists.txt”
add_executable(hello_world_node src/hello_world_node.cpp)
target_link_libraries(hello_world_node
${catkin_LIBRARIES}
)6. 编译.
ctrl + shift + P, 输入“task”, 选择“Configure Default Build Task”.

选择“catkin_make: build”.

生成了“task.json”文件.

然后使用ctrl + shift + B编译.
7. 运行.
ctrl + shift + P, 输入“ROS:Start”, 相当于运行“roscore”.

然后输入“ROS:Run a ROS executable”, 输入功能包名称和节点名称.




运行成功.
使用“ROS:Stop”关闭“roscore”.







![[附源码]计算机毕业设计springboot旅游度假村管理系统](https://img-blog.csdnimg.cn/0112040053aa4e77abe8afae3a75f4b1.png)