程序模拟物体从10000米高空掉落后的反弹行为。
球体每落地一次,就会反弹至原高度的一半。按用户输入的弹跳次数,计算球体每次弹跳的高度。
实现过程:
1.
新建项目;
2.
接收
用户输入的弹跳次数:
(1)创建Scanner对象,设置参数:System.in。
(2)调用Scanner的nextInt方法获取用户输入的球体弹跳次数。
3.
根据
落体计算规则,计算落体高度:
(1)创建球体高度整型变量,默认值:10000。
(2)创建for循环模拟反弹,循环边界:用户输入的弹跳次数。
(3)每次循环,球体高度 =球体高度 / 2;
(4)每次循环,判断球体的高度是否球体高度 / 2。等于0(球体落地):
1)如果已经落地,那么在控制台输出:"第" + N + "次反弹后,球体落地"(N为循环变量)。
2)如果未落地,那么继续计算高度。
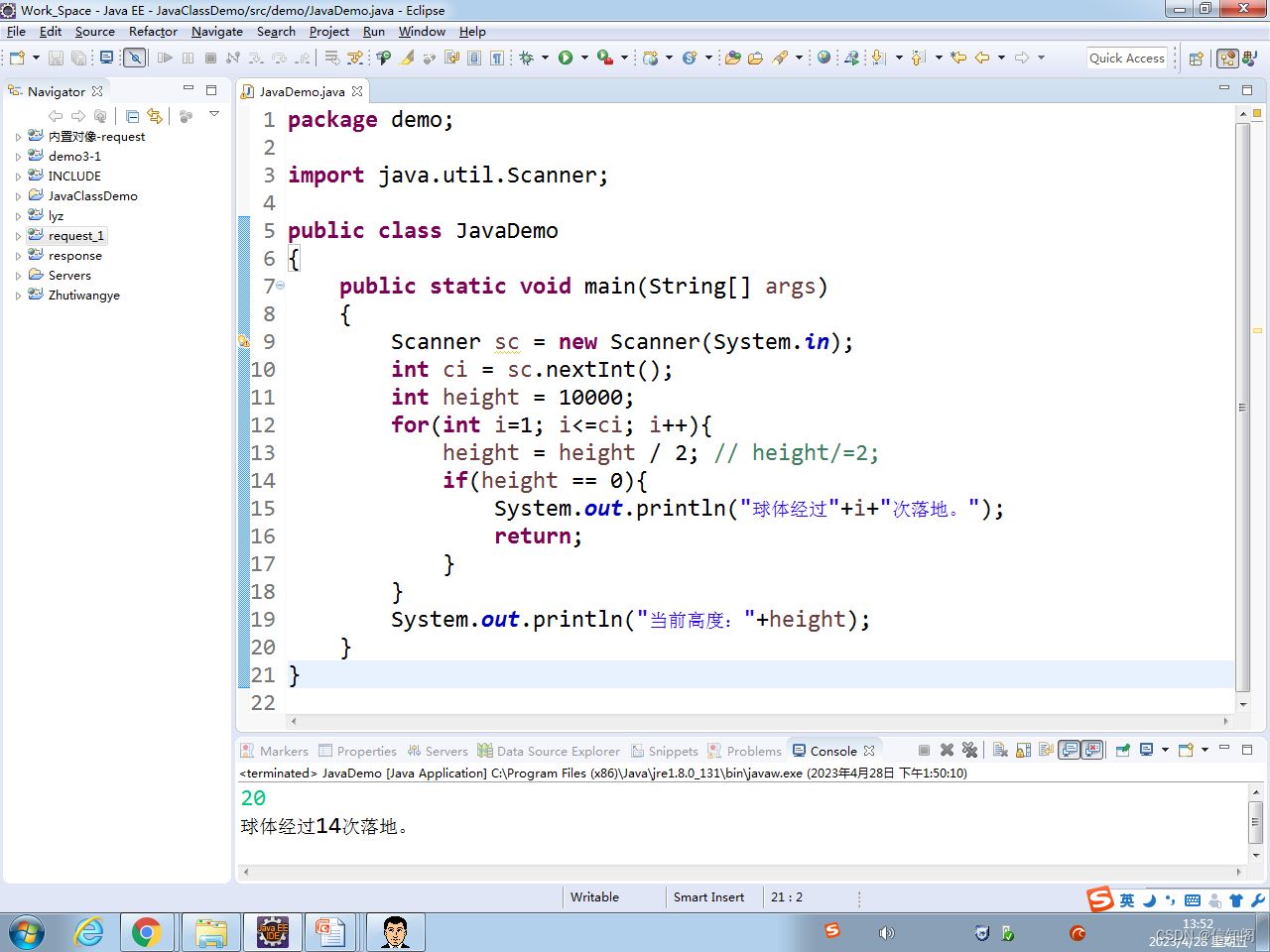
package demo;
import java.util.Scanner;
public class JavaDemo
{
public static void main(String[] args)
{
Scanner sc = new Scanner(System.in);
int ci = sc.nextInt();
int height = 10000;
for(int i=1; i<=ci; i++){
height = height / 2; // height/=2;
if(height == 0){
System.out.println("球体经过"+i+"次落地。");
return;
}
}
System.out.println("当前高度:"+height);
}
}
效果如下: