论文信息
题目:
Amos-SLAM:An Anti-Dynamics Two-stage SLAM Approach
Amos-SLAM:一种基于视觉和几何的抗动态双阶段SLAM方法
论文地址:
https://arxiv.org/pdf/2302.11747.pdf
发表期刊:
Computer Science > Robotics
标签
xxxx
摘要
传统的同步定位与映射(SLAM)系统依赖于对静态环境的假设,当背景中存在动态物体时,无法准确估计系统的位置。基于学习的动态SLAM系统在处理未知运动物体方面存在困难,而基于几何的方法在解决未知动态物体对位置估计的残余影响方面取得了有限的成功。为了解决这些问题,我们提出了一种反动力学的两阶段SLAM方法。首先,利用光流跟踪和模型生成方法提取先验和非先验动态目标的潜在运动区域,快速获得动态识别的位姿估计;其次,通过动态判断去除每帧中的动态点;对于非先验动态目标,我们提出了一种基于图像颜色和几何信息的超像素提取和几何聚类来确定潜在运动区域的方法。对公共RGB-D数据集中多个低动态和高动态序列的评估表明,我们提出的方法优于最先进的动态SLAM方法
内容简介
为了有效地处理自然环境中的动态目标,我们提出了一种采用两阶段动态分割算法的视觉SLAM系统。该算法将动态目标分为先验动态目标和未知动态目标,并分别进行处理。**首先,采用实时实例分割方法从输入图像中提取先验动态目标;不同于其他方法(例如,向实时(TR)SLAM[11])只处理关键帧以追求实时性,而关键帧不被更新。我们对每一帧进行处理,以确保动态处理不受动态点的连续影响。为了解决场景中未知的动态物体,利用图像中的颜色和几何信息提取超像素块并进行几何聚类。然后通过簇的重投影误差提取潜在的运动区域,并通过外几何约束确定可能的动态区域的运动。**与传统的基于过像素的动态SLAM方法进行运动判断相比,基于超像素块的方法效率更高,运动分割更精细。本文的主要贡献如下:
1)提出了一种基于ORB-SLAM2的动态环境实时语义RGB D SLAM系统;
2)提出了一种结合实例分割和视觉几何分割的两阶段动态检测方法,通过改进的运动判断,更好地从场景中去除先验运动物体和未知运动物体
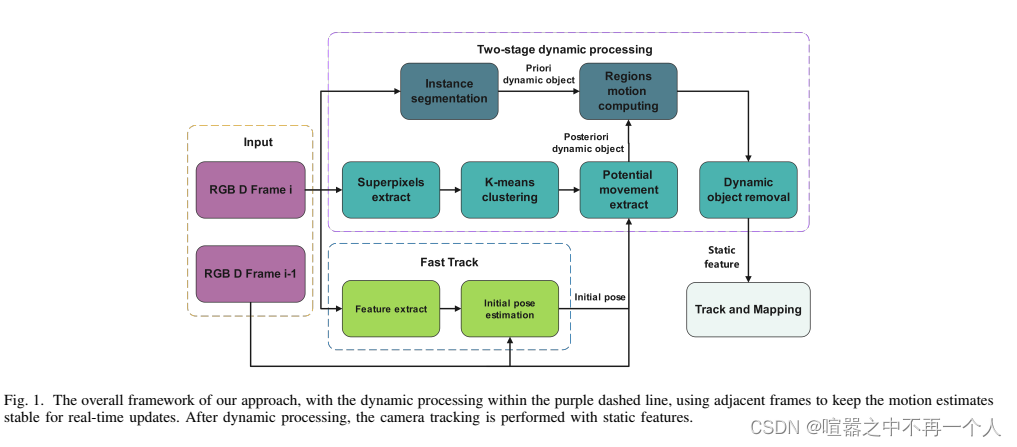
针对动态环境对SLAM系统的影响,提出了一种两阶段动态分割策略,将动态分割问题分为潜在运动区域获取和动态确定两个阶段。具体过程如下:第一阶段,将潜在运动区域划分为先验动态对象和非先验动态对象;通过实例分割可以直接得到先验动态对象的潜在运动区域。对于非先验动态目标,通过超像素聚类分割将场景划分为不同的聚类,并通过平均重投影误差获得潜在的动态区域。第二阶段,通过改进的运动判断,确定实际的动态部分,最终去除场景中的动态物体。
评价
该分析来自于chatgpt4
论文名称:Amos-SLAM: An Anti-Dynamics Two-stage SLAM Approach
方法:
这篇文章提出了一种基于视觉和几何的抗动态双阶段SLAM方法。首先,通过实例分割处理先验动态目标,然后通过超像素分块和几何聚类处理未知动态目标。该方法将动态目标分为先验动态对象和未知动态对象,并分别处理。
创新点:
- 提出了一种实时语义RGB-D SLAM系统,基于ORB-SLAM2,用于动态环境。
- 提出了一种两阶段动态检测方法,结合实例分割和视觉几何分割,以更好地通过改进的运动判断从场景中移除先前移动的物体和未知移动的物体。
- 在TUM数据集上的多个对比实验表明,该方法与先前的最先进动态SLAM方法相比具有最佳精度。
不足之处:
- 动态对象识别的改进仍有待提高,如通过Surfel表示和静态环境的语义密集映射。
- 更准确的动态判断方法仍需探讨,以进一步提高系统性能。
潜在创新方向:
- 在动态对象识别方面,可以尝试使用更先进的表示方法(如Surfel表示)和静态环境的语义密集映射。
- 在动态判断方法上,可以研究更精确的算法,以提高系统在动态环境中的性能。
- 尝试将其他类型的传感器(如激光雷达)与视觉信息融合,以提高动态对象检测和处理的准确性和鲁棒性。
阅读总结
文章思路值得借鉴
问题提出;
1、深度学习的方法基于先验知识,不能去除潜在动态物体
2、深度学习的方法会增加系统处理时间
3、基于几何的像素点方法会增加系统内存以及计算量
提出的解决办法
1、利用几何+语义的方法提出非先验的潜在动态物体
2、采用轻量级网络分割每一帧
3、采用超像素块进行几何约束
总结:
一个很好的思路,值得借鉴、但是没有考虑到潜在静态物体对定位有帮助的问题,会导致过度剔除。