上一节我们已经看到了, 传感器数据是通过CollatedTrajectoryBuilder类的HandleCollatedSensorData函数 传递给 GlobalTrajectoryBuilder类的相应函数. 从GlobalTrajectoryBuilder开始, 传感器数据才真正进入到Cartographer的前后端. Cartographer最重要的数据类型就是点云, 所以这节我们看看点云这个传感器数据类型在传入Cartographer之前, 都做了什么处理.
GlobalTrajectoryBuilder类
上一节已经说过, GlobalTrajectoryBuilder是LocalTrajectoryBuilder与PoseGraph的结合, 这两个类都是继承于TrajectoryBuilderInterface.
GlobalTrajectoryBuilder与LocalTrajectoryBuilder联系是建立在AddSensorData上面
/**
* @brief 点云数据的处理, 先进行扫描匹配, 然后将扫描匹配的结果当做节点插入到后端的位姿图中
*
* @param[in] sensor_id topic名字
* @param[in] timed_point_cloud_data 点云数据
*/
void AddSensorData(
const std::string& sensor_id,
const sensor::TimedPointCloudData& timed_point_cloud_data) override {
CHECK(local_trajectory_builder_)
<< "Cannot add TimedPointCloudData without a LocalTrajectoryBuilder.";
// 进行前端(扫描匹配), 返回匹配后的结果
std::unique_ptr<typename LocalTrajectoryBuilder::MatchingResult> //local_trajectory_builder_Xd.h中定义MatchingResult
matching_result = local_trajectory_builder_->AddRangeData(
sensor_id, timed_point_cloud_data);
......GlobalTrajectoryBuilder的AddSensorData通过调用LocalTrajectoryBuilder的AddXxxData成员函数, 把传感器数据传递给LocalTrajectoryBuilder, 实现前端. 接下来我们看看点云数据传入之前做了哪些处理. 咱们进到LocalTrajectoryBuilder2D的AddRangeData中去看看
/**
* @brief 处理点云数据, 进行扫描匹配, 将点云写成地图
*
* @param[in] sensor_id 点云数据对应的话题名称
* @param[in] unsynchronized_data 传入的点云数据
* @return std::unique_ptr<LocalTrajectoryBuilder2D::MatchingResult> 匹配后的结果
*/
std::unique_ptr<LocalTrajectoryBuilder2D::MatchingResult>
LocalTrajectoryBuilder2D::AddRangeData(
const std::string& sensor_id,
const sensor::TimedPointCloudData& unsynchronized_data)
{
......
}多激光雷达数据时间同步与融合
首先,在local_trajectory_builder_2d.cc中,AddRangeData这个函数的第一步,也就是range_data_collator_.AddRangeData, 这个函数做到了多雷达的点云时间同步.
// Step: 1 进行多个雷达点云数据的时间同步, 点云的坐标是相对于tracking_frame的
auto synchronized_data =
range_data_collator_.AddRangeData(sensor_id, unsynchronized_data);
if (synchronized_data.ranges.empty()) {
LOG(INFO) << "Range data collator filling buffer.";
return nullptr;
}咱们看看range_data_collator_.AddRangeData这块. range_data_collator_是RangeDataCollator的实例化, 进到RangeDataCollator去看看AddRangeData成员函数. 这个函数的作用就是将多个雷达数据的时间进行同步
/**
* @brief 多个雷达数据的时间同步
*
* @param[in] sensor_id 雷达数据的话题
* @param[in] timed_point_cloud_data 雷达数据
* @return sensor::TimedPointCloudOriginData 根据时间处理之后的数据
*/
sensor::TimedPointCloudOriginData RangeDataCollator::AddRangeData(
const std::string& sensor_id,
sensor::TimedPointCloudData timed_point_cloud_data)
{
...
}这个函数里面判断了两种电影情况:
1. 如果当前点云还有没处理的, 就同步没处理的点云,然后将当前点云保存
if (id_to_pending_data_.count(sensor_id) != 0) {
// current_end_为上一次时间同步的结束时间
// current_start_为本次时间同步的开始时间
current_start_ = current_end_;
// When we have two messages of the same sensor, move forward the older of
// the two (do not send out current).
// 本次时间同步的结束时间为这帧点云数据的结束时间
current_end_ = id_to_pending_data_.at(sensor_id).time;
auto result = CropAndMerge();
// 保存当前点云
id_to_pending_data_.emplace(sensor_id, std::move(timed_point_cloud_data));
return result;
}2. 当前点云处理完了,处理下一个点云
// 先将当前点云添加到 等待时间同步的map中
id_to_pending_data_.emplace(sensor_id, std::move(timed_point_cloud_data));
// 等到range数据的话题都到来之后再进行处理
if (expected_sensor_ids_.size() != id_to_pending_data_.size()) {
return {};
}
current_start_ = current_end_;
// We have messages from all sensors, move forward to oldest.
common::Time oldest_timestamp = common::Time::max(); //最大时间9999999年
// 找到所有传感器数据中最早的时间戳(点云最后一个点的时间)
for (const auto& pair : id_to_pending_data_) {
oldest_timestamp = std::min(oldest_timestamp, pair.second.time);
}
// current_end_是本次时间同步的结束时间
// 是待时间同步map中的 所有点云中最早的时间戳
current_end_ = oldest_timestamp;
return CropAndMerge();这两个情况的区别就只有current_end_, 也就是本次时间同步结束的时间不一样. 之前提到过, 每次scan的时间戳是每次scan的最后一个点的时间戳. 于是处理点云的时候,current_end_是待时间同步的点云中最早的点云的最后一个点的时间戳. 而current_start_是上一次处理点云的current_end_时间.
在激光雷达的同步融合的部分, 最重要的函数是CropAndMerge()这个函数, 顾名思义,就是把不同的点云裁剪合并,
CropAndMerge()
// 找到点云中 最后一个时间戳小于current_start_的点的索引
auto overlap_begin = ranges.begin();
while (overlap_begin < ranges.end() &&
data.time + common::FromSeconds((*overlap_begin).time) <
current_start_) {
++overlap_begin;
}
// 找到点云中 最后一个时间戳小于等于current_end_的点的索引
auto overlap_end = overlap_begin;
while (overlap_end < ranges.end() &&
data.time + common::FromSeconds((*overlap_end).time) <=
current_end_) {
++overlap_end;
}这一块是找到最后一个小于current_start_和current_end_的点云的时间, current_start_是上一次的的current_end_的时间戳, current_end_是当前未处理点云中最早一帧点云的最后一个点的时间戳. 上面这些代码作用是找到current_start_和current_end_之间所有雷达的点的索引,用于限制范围.
// 丢弃点云中时间比起始时间早的点, 每执行一下CropAndMerge()打印一次log, 一般不会触发
if (ranges.begin() < overlap_begin && !warned_for_dropped_points) {
LOG(WARNING) << "Dropped " << std::distance(ranges.begin(), overlap_begin)
<< " earlier points.";
warned_for_dropped_points = true;
}上面的代码一般不会触发,除非雷达自己的时间戳就有问题
// Copy overlapping range.
if (overlap_begin < overlap_end) {
// 获取下个点云的index, 即当前vector的个数
std::size_t origin_index = result.origins.size();
result.origins.push_back(data.origin); // 插入原点坐标
// 获取此传感器时间与集合时间戳的误差,
const float time_correction =
static_cast<float>(common::ToSeconds(data.time - current_end_));
auto intensities_overlap_it =
intensities.begin() + (overlap_begin - ranges.begin());
// reserve() 在预留空间改变时, 会将之前的数据拷贝到新的内存中
result.ranges.reserve(result.ranges.size() +
std::distance(overlap_begin, overlap_end));
// 填充数据
for (auto overlap_it = overlap_begin; overlap_it != overlap_end;
++overlap_it, ++intensities_overlap_it) {
sensor::TimedPointCloudOriginData::RangeMeasurement point{
*overlap_it, *intensities_overlap_it, origin_index};
// current_end_ + point_time[3]_after == in_timestamp +
// point_time[3]_before
// 针对每个点时间戳进行修正, 让最后一个点的时间为0
point.point_time.time += time_correction;
result.ranges.push_back(point);
} // end for
} // end if (overlap_begin < overlap_end)上面代码是CropAndMerge()的核心,通过for循环,遍历每一个在start和end之间的点云点,重新生成对应的cartographer的点云点. time_correction是data.time - current_end_的结果, current_end_是待时间同步map中,所有点云最早的时间戳, data.time是点云中最后一个点的时间戳, data.time - current_end_结果是正的. 而之前说过, 点云的时间戳都是负的,通过point.point_time.time += time_correction让最后一个点的时间戳为0,前面的点的时间戳为负数.
std::sort(result.ranges.begin(), result.ranges.end(),
[](const sensor::TimedPointCloudOriginData::RangeMeasurement& a,
const sensor::TimedPointCloudOriginData::RangeMeasurement& b) {
return a.point_time.time < b.point_time.time;
});然后通过sort函数把点云按照时间从小到大排列起来,再返回出去. 这样就得到了融合之后,时间戳归一化后的的一帧点云.
下面补一张图, 更好的说明一下.
当上一次扫描结束后,current_end_在current end0处,然后currentend0变为currentstart1,然后在两个scan中找到未处理的scan的最早的一个时间戳, 也就是scan2的第一帧scan的末尾时间, 作为current_start_,也就是current_end1处,然后进行CropAndMerge. 然后再把currentend1变为current start2 再找到未处理的scan的最早的一个时间戳,也就是scan1的第二帧,作为current_end2, 再进行CropAndMerge,然后current_end2变为current_start3,在找到current_end4,继续这个步骤,就完成了两个scan的合并.
点云数据的畸变矫正
cartographer的点云畸变矫正是通过位姿推测器(pose_extrapolator)和点云中每个点的时间戳, 去估计一帧点云中的点去畸变后的位子. 位姿推测器可以估计出每时每刻当前机器人的线速度和角速度,然后得到每时的位姿变化,通过点云的每个点时间戳,然后对每个点的相于原点的位子进行矫正.
直接看程序,在local_trajectory_builder_2d.cc的AddRangeData中. 我们上一小节已经看过了多雷达点云的时间同步了,这个AddRangeData这个函数的第一步,第二步就是点云的畸变矫正.
在真正进入到点云的畸变矫正之前, 还判断了是否有IMU数据,如果没有的话还初始化了位姿推测器(位姿推测器在cartographer中是很重要的,这个以后再说)
if (!options_.use_imu_data()) {
InitializeExtrapolator(time);
}还有关于时间相关的处理: 得到点云第一个点的时间戳
const common::Time& time = synchronized_data.time;
...
CHECK_LE(synchronized_data.ranges.back().point_time.time, 0.f);
const common::Time time_first_point =
time +
common::FromSeconds(synchronized_data.ranges.front().point_time.time);time是点云融合之后的时间戳, 是最后一个点的绝对时间戳,是正数

synchronized_data.ranges.front().point_time.time是点云点相对于点云的相对时间戳,也就是某个点云点相对于最后最后一个点云点的时间差,是负数,所以要做个CHECK_LE判断是不是小于等于0.0 所以这两个一相加就是第一个点云点的绝对时间戳, 是正数.
然后预测每个时间点下机器人的位姿
for (const auto& range : synchronized_data.ranges) {
common::Time time_point = time + common::FromSeconds(range.point_time.time);
// 如果该时间比上次预测位姿的时间还要早,说明这个点的时间戳往回走了, 就报错
if (time_point < extrapolator_->GetLastExtrapolatedTime()) {
// 一个循环只报一次错
if (!warned) {
LOG(ERROR)
<< "Timestamp of individual range data point jumps backwards from "
<< extrapolator_->GetLastExtrapolatedTime() << " to " << time_point;
warned = true;
}
time_point = extrapolator_->GetLastExtrapolatedTime();
}
range_data_poses.push_back(
extrapolator_->ExtrapolatePose(time_point).cast<float>());
}extrapolator_->ExtrapolatePose(time_point).cast<float>())通过位姿推测器,预测出每个点云点在他的时间戳时刻下机器人在local 坐标系下的位姿.
然后进行运动畸变的去除
for (size_t i = 0; i < synchronized_data.ranges.size(); ++i) {
// 获取在tracking frame 下点的坐标
const sensor::TimedRangefinderPoint& hit =
synchronized_data.ranges[i].point_time;
// 将点云的origins坐标转到 local slam 坐标系下
const Eigen::Vector3f origin_in_local =
range_data_poses[i] *
synchronized_data.origins.at(synchronized_data.ranges[i].origin_index);
// 运动畸变的去除, 将相对于tracking_frame的hit坐标 转成 local坐标系下的坐标
sensor::RangefinderPoint hit_in_local =
range_data_poses[i] * sensor::ToRangefinderPoint(hit);
// 计算这个点的距离, 这里用的是去畸变之后的点的距离
const Eigen::Vector3f delta = hit_in_local.position - origin_in_local;
const float range = delta.norm();
// param: min_range max_range
if (range >= options_.min_range()) {
if (range <= options_.max_range()) {
// 在这里可以看到, returns里保存的是local slam下的去畸变之后的点的坐标
accumulated_range_data_.returns.push_back(hit_in_local);
} else {
// 超过max_range时的处理: 用一个距离进行替代, 并放入misses里
hit_in_local.position =
origin_in_local +
// param: missing_data_ray_length, 是个比例, 不是距离
options_.missing_data_ray_length() / range * delta;
accumulated_range_data_.misses.push_back(hit_in_local);
}
}
} // end for上面的函数是对每个点云点进行处理, 步骤如下
获取现在点云距离的原始数据(变量为hit)
讲点云的原始距离数据转化为local坐标系下的数据(origin_in_local), 此时只是坐标的转换, 并没有去畸变.
真正的去畸变(hit_in_local), 方法是将原始数据转化为local坐标系下的坐标, range_data_poses是通过位姿推测器预测出的点的时间戳
计算去畸变点云的距离,并且用配置参数的最大最小距离去进行数据的过滤, 对距离合适的数据放在returns这个数组里, 对于距离不合适的放在misses这个数组里.
上面的这些步骤就把点云的畸变去除了, 并且把点云点的距离重原始数据的坐标系转化到local坐标系下了.
Z轴过滤
在TransformToGravityAlignedFrameAndFilter里面,调用了sensor的CropRangeData
sensor::CropRangeData(sensor::TransformRangeData(range_data,
transform_to_gravity_aligned_frame), options_.min_z(), options_.max_z())这个函数主要是针对多线雷达的, 去过滤掉打在地面上的雷达数据. 通过重力把位姿估计出来, 然后就能知道哪些点云点是打在地上的, 地上的雷达点的Z轴数据都是负数的. 这里我没用多线雷达没有深入研究.
值得注意的是, 如果用单线雷达在配置文件里不能设置大于0 的min_z, 因为单线雷达的z就是0, 这样就会过滤所有雷达数据.
点云的体素滤波与后处理
体素滤波就是在规定体积大小的小方块里, 用一个点云去代表这个小方块里所有的点云, 这个点云是用这个方块内所有点云的质心得到的. 但cartographer不是这么做的, 他通过随机数去随机找格子里的点以减小计算量,代码在voxel_filter.cc中, 很简单不细说了
体素滤波的使用的代码依然在TransformToGravityAlignedFrameAndFilter里面
return sensor::RangeData{
cropped.origin,
sensor::VoxelFilter(cropped.returns, options_.voxel_filter_size()), // param: voxel_filter_size
sensor::VoxelFilter(cropped.misses, options_.voxel_filter_size())};核心函数是sensor::VoxelFilter, 对hit和miss的点云都进行滤波
然后这个返回值放到了AddAccumulatedRangeData函数中, 这个AddAccumulatedRangeData函数通过对齐位姿到0去转3D到2D,又调用自适应体素滤波,得到一个点数较少的点云.
const sensor::PointCloud& filtered_gravity_aligned_point_cloud =
sensor::AdaptiveVoxelFilter(gravity_aligned_range_data.returns,
options_.adaptive_voxel_filter_options());然后把这个点云与submap进行匹配(这个之后再说)
std::unique_ptr<transform::Rigid2d> pose_estimate_2d =
ScanMatch(time, pose_prediction, filtered_gravity_aligned_point_cloud);此时点云都是围绕着local坐标系而不是当前机器人位姿下的坐标系, 所以我们又要转回去:
sensor::RangeData range_data_in_local =
TransformRangeData(gravity_aligned_range_data,
transform::Embed3D(pose_estimate_2d->cast<float>()));再将矫正后的雷达数据写入submap
std::unique_ptr<InsertionResult> insertion_result = InsertIntoSubmap(
time, range_data_in_local, filtered_gravity_aligned_point_cloud,
pose_estimate, gravity_alignment.rotation())InsertIntoSubmap这个函数可以判断是不是真的需要更新地图, 如果移动距离过小或者时间过短都不会更新:
if (motion_filter_.IsSimilar(time, pose_estimate)) {
return nullptr;
}这里的pose_estimate是扫描匹配后的三维位姿(类型为Rigid3d), 而不是二维的, 这和单线雷达的子图是平面图不太一样.
然后,量将点云的数据写入submap中
std::vector<std::shared_ptr<const Submap2D>> insertion_submaps =
active_submaps_.InsertRangeData(range_data_in_local);再将整个点云数据与时间戳等打包成InsertionResult格式的数据进行返回
return absl::make_unique<InsertionResult>(InsertionResult{
std::make_shared<const TrajectoryNode::Data>(TrajectoryNode::Data{
time,
gravity_alignment,
filtered_gravity_aligned_point_cloud,
{}, // 'high_resolution_point_cloud' is only used in 3D.
{}, // 'low_resolution_point_cloud' is only used in 3D.
{}, // 'rotational_scan_matcher_histogram' is only used in 3D.
pose_estimate}),
std::move(insertion_submaps)});先看看InsertionResult这个结构体, 这个是点云插入到地图后的结果
struct InsertionResult {
std::shared_ptr<const TrajectoryNode::Data> constant_data;
std::vector<std::shared_ptr<const Submap2D>> insertion_submaps; // 最多只有2个子图的指针
};insertion_submaps就是要插入的子图, 结构类型为Submap2D指针, 存在vector中, 由于之前讲过子图会保留正在新建的一个和已经建好的一个, 所以这个vector一般是两个Submap的指针
再看看TrajectoryNode::Data, 结构体定义在trajectory_node.h中,
struct Data {
common::Time time;
// Transform to approximately gravity align the tracking frame as
// determined by local SLAM.
Eigen::Quaterniond gravity_alignment;
// Used for loop closure in 2D: voxel filtered returns in the
// 'gravity_alignment' frame.
sensor::PointCloud filtered_gravity_aligned_point_cloud;
// Used for loop closure in 3D.
sensor::PointCloud high_resolution_point_cloud;
sensor::PointCloud low_resolution_point_cloud;
Eigen::VectorXf rotational_scan_matcher_histogram;
// The node pose in the local SLAM frame.
transform::Rigid3d local_pose;
};到这里肯定大家一辆懵逼, Data里面的参数gravity_alignment, filtered_gravity_aligned_point_cloud等到底是啥.
gravity_alignment: 实际上这个参数是gravity_alignment.rotation(), 用来把点云旋转到和重力水平, 如果没有IMU的话还没看是咋回事, 待补充...
filtered_gravity_aligned_point_cloud: 这里存的是体素滤波后的点云, 为了2D闭环用的
{}*3 : 为了3D闭环用的, 没研究
pose_estimate: local坐标系下的节点位姿, 是3D位姿
最后在通过std::move(insertion_submaps)把点云数据放入InsertionResult, 然后返回整个InsertionResult.
额外说一下自适应体素滤波AdaptivelyVoxelFiltered. 这个函数实现在voxel_filter.cc中
传入参数只有选项option和点云point_cloud. 然后分四个步骤进行
1.如果点云已经很稀疏了,直接返回。
2.以max_size为间距,稀疏提取point,调用VoxelFilter。
3.使用max_length过滤,大于就返回
4.没有超过,则继续二分法滤波,使得以low_length为间距。
点云坐标转换总结
上面参数传递, 函数调用一层一层的, 一开始看很难看懂, 真的需要自己仔仔细细捋一捋, 在这简单做个总结, 总结一下点云数据预处理中坐标的转换
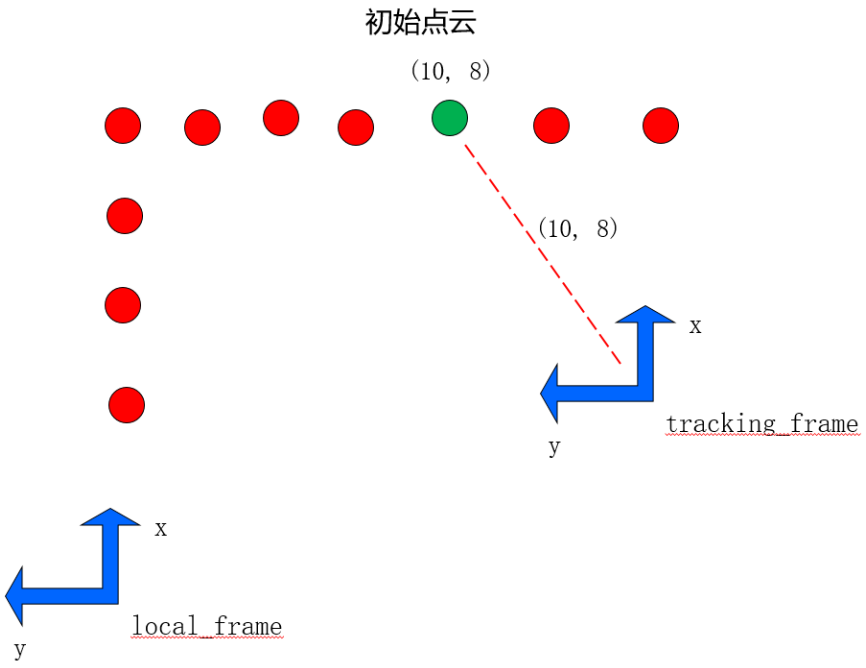
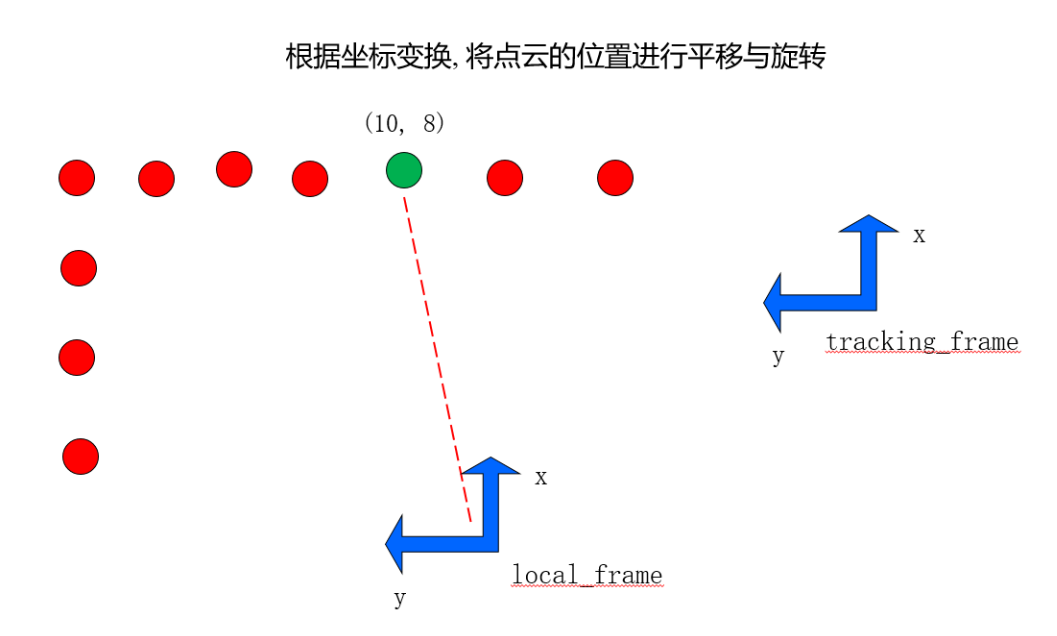
第一步: 进行多个雷达点云的时间同步, 此时点云的坐标是相对于tracking_frame的
初始点云坐标为(10, 8)
第二步: 预测出每个点云的时间戳, 通过位姿推测器推测出tracking frame 在local坐标系下的坐标.
第三步: 去除运动畸变, 方法是将tracking_frame的hit坐标转化成local坐标系下的坐标
sensor::RangefinderPoint hit_in_local = range_data_poses[i] * sensor::ToRangefinderPoint(hit);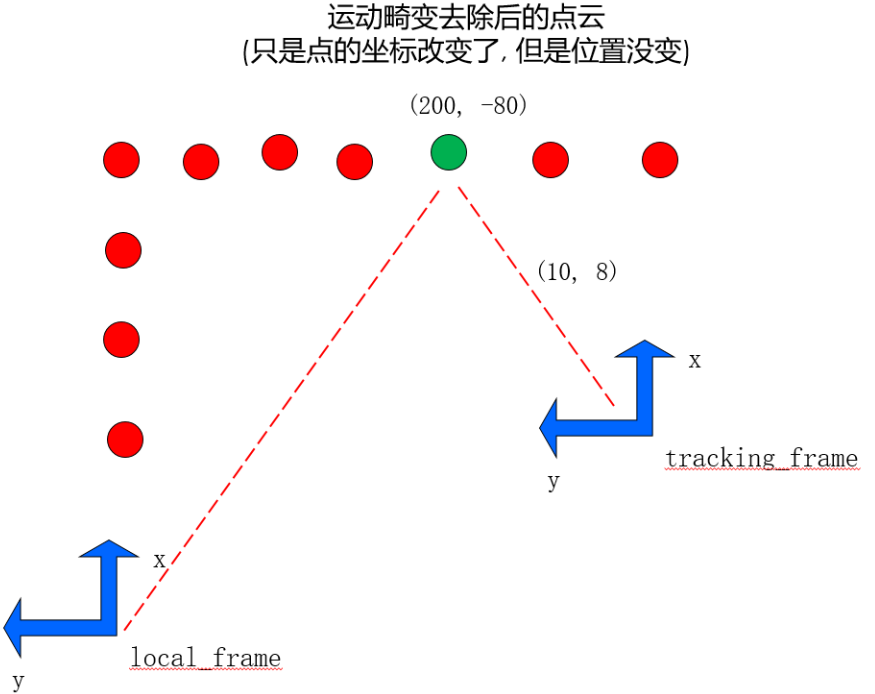
此时在tracking_frame下的坐标为(10, 8)的点转换到了local_frame坐标下, 为(200, -80)了, 此时点云还在围绕着tracking_frame而不是local_frame, 但坐标原点从tracking_frame转换到了local_frame上.
第四步: 对于超距离范围的点云, 用一个固定距离代替, 并放在misses里面.
那么, 此时我们用啥时候的时间戳下的坐标系当成点云的origin坐标呢?是用点云的最后一个点的时间预测出来的坐标作为点云的origin坐标:
accumulated_range_data_.origin = range_data_poses.back().translation()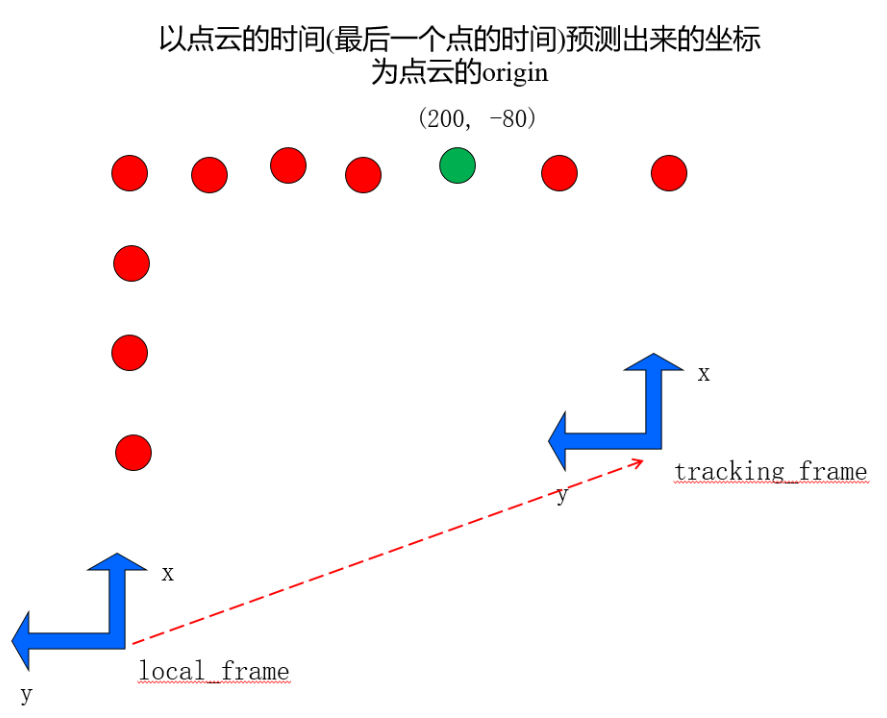
第五步: 将点云从围绕着当前位姿(tracking 坐标系)转到local坐标系下
gravity_alignment.cast<float>() * range_data_poses.back().inverse()上面这个式子得到了tracking到local的转换矩阵,
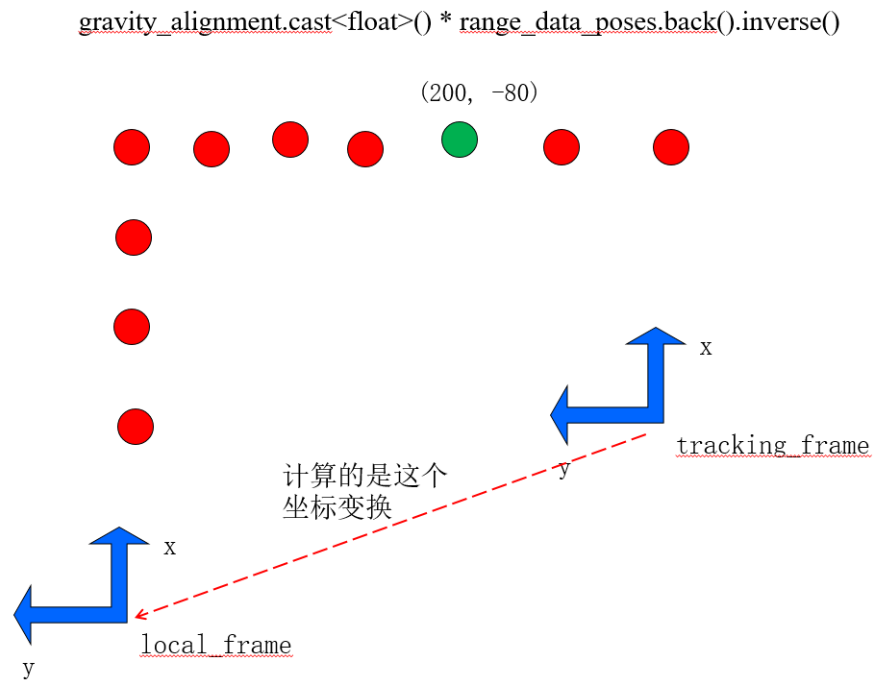
然后通过point_cloud.cc的函数TransformPointCloud把每个点云转化到了围绕local坐标系下的点云
PointCloud TransformPointCloud(const PointCloud& point_cloud,
const transform::Rigid3f& transform) {
std::vector<RangefinderPoint> points;
points.reserve(point_cloud.size());
for (const RangefinderPoint& point : point_cloud.points()) {
points.emplace_back(transform * point);
}
return PointCloud(points, point_cloud.intensities());
}
此时这一帧的所有点云都围绕在了local_frame下
第六步: 进行点云的z轴过滤与体素滤波等处理
第七步: 扫描匹配(前端)
第八步: 将原点位于local坐标系处的点云再转变为原点位于匹配后的位姿处的点云, 也就是又变回去了
sensor::RangeData range_data_in_local =
TransformRangeData(gravity_aligned_range_data,
transform::Embed3D(pose_estimate_2d->cast<float>()));现在有个疑问, 把点云转化到local坐标系下咋进行前端匹配呢?这个后面再说